Группа изобретений относится к транспортной технике и может быть использована в подвижных железнодорожных составах, предназначенных для пассажирских или грузовых перевозок.
Задача, решаемая изобретениями, состоит в обеспечении безопасности движения железнодорожного транспорта для предупреждения людских потерь и снижения экономических затрат на железной дороге в результате аварийного схода вагонов подвижного состава с рельсов.
Известен способ автоматического торможения подвижного состава при сходе вагона с рельсов (а.с. СССР №1428627, В 60 Т 7/12), когда идентификацию схода вагона осуществляют отслеживанием вертикальных и продольных колебательных ускорений на ходовых тележках вагонов, которые получают в виде непрерывных электрических сигналов, пропускают через фильтры низких частот и выпрямители, а затем сравнивают с опорным "фоновым" сигналом. Полученные результаты суммируют и при превышении ими установленных пороговых значений идентифицируют сход и формируют управляющий сигнал для блока включения тормоза ("автостопа") на каждом вагоне. Способ прост, но недостаточно эффективен. К тому же принятая в нем жесткая и удлиненная схема торможения приводит к увеличению потерь на железной дороге.
Известен более точный и быстродейственный способ идентификации схода вагона подвижного состава с рельсов (патент РФ №2209740, В 60 Т 7/12), основанный на использовании многофакторных акустических критериев оценки колебательных ускорений, отслеживаемых на ходовых тележках вагонов, которые преобразуют в двоично-цифровой код и оценивают информационное поле ускорений с помощью программируемой логической интегральной схемы. Усложненный алгоритм вычислений требует дорогостоящего электронного оборудования, поэтому широкое использование этого способа на железнодорожном транспорте экономически нецелесообразно, особенно при грузовых перевозках.
Наиболее близким аналогом (прототипом) предлагаемого способа является способ автоматического торможения подвижного состава при сходе вагона с рельсов (патент РФ №2137632, В 60 Т 7/12), заключающийся в идентификации схода путем постоянной оценки временного информационного поля ускорений и последующем формировании управляющего сигнала для срабатывания тормозной системы состава. Для идентификации схода в режиме "нон-стоп" отслеживают исходные импульсы колебательных ускорений в виде непрерывных электрических сигналов, преобразуют их в низкочастотные дискретные сигналы с заданным шагом квантования, проводят оценку временного информационного поля этих ускорений в заданном диапазоне частот и сравнивают его с опорным "фоновым" полем, которое устанавливают в "околошпальной" частоте, определяемой экспериментально. При превалировании временного информационного поля над "фоновым" идентифицируют сход и включают блок автоматического торможения на локомотиве.
Недостаток способа-прототипа в том, что в качестве временного информационного поля оценивают энергии спектров ускорений и в узкополосном диапазоне "шпальной" частоты, рассчитываемой в режиме реального времени как производной от скорости движения локомотива, причем за исходные принимают импульсы вертикальных и поперечных ускорений в ходовой части локомотива, являющиеся отражением вынужденных упругих колебаний рельсового пути (как бы вторичные), вследствие чего процесс идентификации схода в некоторой мере опосредован и обезличен (отсутствует адресность схода), его алгоритм перенасыщен большим объемом вычислений. Поэтому способ не обладает должной достоверностью и быстродействием, необходимыми для обеспечения безопасности пассажирских перевозок, и непригоден для длинномерных грузовых составов (как показали проведенные расчеты и натурные эксперименты вследствие затухания волны колебаний рельсового пути на расстоянии L от места схода колесной пары до локомотива соотношение "полезный сигнал - фон" быстро снижается и при L≥150 метров сход таким способом не идентифицируется).
К тому же узкополосный режим оценки ускорений не только не достаточно эффективен, но и требует специальной аппаратуры.
Технический результат от использования изобретения - способа заключается в:
- повышении достоверности и быстродействия идентификации схода за счет упрощения алгоритма процесса;
- обеспечении оперативности нештатного торможения состава в безаварийном гибком режиме за счет достоверности и адресности оценки схода, сокращения временного интервала в цикле "сход - торможение".
Для достижения технического результата в способе автоматического торможения подвижного состава, при котором в режиме "нон-стоп" отслеживают исходные импульсы колебательных ускорений в виде непрерывных электрических сигналов, преобразуют их в низкочастотные дискретные сигналы с заданным шагом квантования, проводят оценку временного информационного поля ускорений и сравнение его с опорным "фоновым" полем ускорений и по превалированию временного информационного поля над "фоновым" идентифицируют сход и формируют управляющий сигнал для включения тормозной системы состава, в отличие от аналогов за исходные принимают импульсы вертикальных колебательных ускорений, отслеживаемых в зонах наибольшего возбуждения колебаний на ходовых тележках вагонов, по меньшей мере в одной зоне, при этом идентификацию схода и формирование управляющего сигнала осуществляют в автономном для каждой из этих зон едином замкнутом цикле, причем в качестве временного информационного поля ускорений оценивают дисперсию спектра отслеживаемых вертикальных колебательных ускорений, а управляющий сигнал формируют в виде сигналов дистанционной связи, например радиосигналов.
Дополнительные отличия состоят в том, что дисперсию спектра вертикальных ускорений оценивают в полосе инфранизких частот и "фоновое" поле ускорений устанавливают в полосе инфранизких частот.
Известно устройство для автоматического торможения подвижного состава при сходе вагона с рельсов (а.с. СССР №1428627, В 60 Т 7/12), содержащее ряд датчиков вертикальных ускорений и датчиков продольных ускорений, фильтры низких частот и детекторы по числу датчиков, и два компаратора с источниками опорного сигнала, подключенные через логический элемент "И" к входу формирователя управляющего сигнала, выход которого связан с блоком включения тормоза. Выполнено устройство в виде разветвленной электрической схемы, размещенной на ходовых тележках вагона. Устройство не обеспечивает достаточно эффективной идентификации схода, обладает жестким режимом торможения вагона и насыщенной электроразводкой, обуславливающей вероятность отказов в работе. Его применение ограничено только пассажирскими составами, так как оно запитано от системы электроснабжения вагона.
Наиболее близким аналогом предлагаемого устройства (прототипом) по числу совпадающих признаков является устройство для автоматического торможения подвижного состава при сходе вагона с рельсов (патент РФ №2137632, В 60 Т 7/12), размещенное на локомотиве и содержащее датчики вертикальных и поперечных ускорений, фильтры низкой частоты, аналого-цифровые преобразователи, средства оценки временного информационного поля ускорений, компараторы, источники опорного "фонового" поля ускорений и формирователь управляющего сигнала для блока автоматического включения тормозной системы локомотива. Дополнительно устройство содержит аппаратуру для расчета "шпальной" частоты, и сход вагона идентифицируется им опосредовано в зависимости от вынужденных упругих колебаний рельсового пути и скорости движения локомотива, поэтому конструктивно устройство перегружено обилием элементов и связей, для оценки временного информационного поля содержит специальную аппаратуру, алгоритм срабатывания "сход-торможение", в нем осуществляется в общем для всех ходовых тележек вагонов цикле, и ограничен по длине поезда, а это снижает оперативность торможения, не обеспечивает адресной идентификации схода, необходимой для установления гибкого безаварийного режима торможения, ограничивает технические возможности способа.
Технический результат, получаемый от использования изобретения - устройства, заключается в реализации способа, обеспечивающего оперативное безаварийное торможение подвижного состава в нештатной ситуации при сходе вагона с рельсов, а также в расширении технических возможностей устройства, упрощении и удешевлении идентификации схода.
Технический результат достигается тем, что устройство для автоматического торможения подвижного состава при сходе вагона с рельсов, содержащее датчики вертикальных ускорений, фильтры низкой частоты, аналого-цифровые преобразователи, средства оценки временного информационного поля ускорений, компараторы, источники опорного "фонового" поля ускорений и формирователь управляющего сигнала для блока автоматического включения тормозной системы локомотива, в отличие от аналогов выполнено в виде n-ряда независимых блоков, устанавливаемых в зонах отслеживания вертикальных колебательных ускорений на ходовых тележках вагонов, каждый блок напрямую связан со штатной системой радиосвязи локомотива, включает в себя датчик вертикальных колебательных ускорений, фильтр низкой частоты и аналого-цифровой преобразователь из числа упомянутых и дополнительно снабжен индивидуальными средством оценки временного информационного поля вертикальных колебательных ускорений, компаратором, источником опорного "фонового" поля ускорений и формирователем управляющего сигнала; при этом средство оценки временного информационного поля ускорений выполнено в виде элемента расчета дисперсии спектра вертикальных ускорений, подключенного входом к аналого-цифровому преобразователю и выходом к компаратору, и в качестве формирователя управляющего сигнала установлен генератор радиоимпульсов, снабженный передатчиком радиосигнала, настроенным на частоту приема штатной радиосвязи локомотива, к которой подключен блок автоматического включения тормозной системы.
Причем каждый независимый блок либо запитан от системы электроснабжения вагона, на котором он расположен, либо снабжен автономным источником питания, а блок включения тормоза подключен через блок ожидания.
Способ осуществляется следующим образом.
При движении пассажирского или грузового состава в каждой ходовой тележке вагона по месту расположения колесных пар в зонах наибольшего возбуждения колебательных ускорений в режиме "нон-стоп" отслеживают импульсы вертикальных колебательных ускорений, которые получают в виде непрерывных электрических сигналов, отсекают высокочастотные составляющие сигналов, преобразуют их в дискретные сигналы с заданным шагом квантования и постоянно в режиме реального времени ведут оценку дисперсии спектра вертикальных ускорений (временного информационного поля) в выбранном диапазоне частот. В конкретном примере осуществления способа: Δƒ=2-30 Гц с частотой дискретизации ƒi≈60 Гц (по теореме Котельникова) и длиной реализации Т≈4÷5 с.
Дисперсию рассчитывают по стандартному алгоритму по соотношению
N - число дискретных отсчетов;
хi - амплитуда вертикальных колебательных ускорений в i-тый момент времени.
Число отсчетов определяется длиной реализации ускорений Т=N·Δt.
 - временной интервал дискретизации.
- временной интервал дискретизации.
ƒ - частота дискретизации, равная ƒ=2ƒс, где ƒс - верхняя частота в спектре низкочастотного фильтра.
Длину реализации Т выбирают, исходя из периода Тнф самой низкочастотной гармоники фильтра. В конкретном примере Т≈5 с (Т=10Тнф).
Полученный результат сравнивают с значением опорного "фонового" поля, устанавливаемого также в диапазоне инфранизких частот.
При превалировании временного информационного поля над "фоновым" идентифицируют сход, после чего формируют управляющий сигнал в виде сигнала дистанционной связи, например радиосигнала, и передают его на приемник штатной радиосвязи локомотива и далее на блок автоматического включения тормозной системы. В частных случаях реализации способа включение тормозной системы осуществляют с некоторой задержкой во времени с тем, чтобы в зависимости от состояния и географии пути, характера груза, протяженности состава и удаления места схода от локомотива машинист, руководствуясь своими профессиональными знаниями и опытом, мог выбрать наиболее оптимальный безаварийный режим торможения (в известных аналогах зачастую больший урон приносит не столько сам сход, сколько запаздывание и жесткая стандартная безвариантная схема торможения).
Отслеживание вертикальных колебательных ускорений ведут либо во всех необрессоренных зонах над каждым колесом тележки вагона, либо выборочно, но не менее чем в одной зоне для каждой тележки.
В конкретном примере реализации способа отслеживание ведется в двух противолежащих зонах по месту расположения одной колесной пары.
Идентификацию схода, формирование управляющего сигнала и передачу его на тормозную систему в предложенном способе осуществляют одномоментно в едином для отдельной конкретной зоны отслеживания ускорений завершенном цикле.
Для реализации способа предлагается устройство, выполненное в виде n-ряда (по числу зон отслеживания вертикальных колебательных ускорений) независимых друг от друга конструктивно и функционально блоков А, устанавливаемых на необрессоренных частях ходовых тележек вагона по месту расположения колесных пар.
На чертеже дана блок-схема устройства.
Каждый блок А представляет собой расположенные в корпусе 1 последовательно соединенные между собой датчик вертикальных колебательных ускорений 2, фильтр низкой частоты 3, аналого-цифровой преобразователь 4, элемент 5 для расчета дисперсии спектра отслеживаемых ускорений и компаратор 6, к другому входу которого подключен источник опорного "фонового" поля 7. На выходе компаратор 6 через логический элемент "ИЛИ" 8 подключен к формирователю управляющего сигнала - генератору радиоимпульсов 9, снабженному передатчиком сигнала, настроенным на частоту приема штатной системы радиосвязи локомотива - приемника 10. Приемник 10 и блок автоматического включения тормозной системы 11 расположены на локомотиве.
При движении грузового или пассажирского поезда возникающие на необрессоренных зонах ходовой тележки вагона вертикальные колебательные ускорения регистрируются датчиком 2 в виде непрерывных электрических сигналов.
Во время штатного движения подвижного состава датчиком 2 регистрируется "фон" в виде электрических сигналов, инициированных вертикальными колебательными ускорениями тележки за счет неровностей поверхности катания, "ползунов", стыков рельс и т.п.
При сходе колесной пары с рельсов в результате ударов колес о шпалы возникают интенсивные вертикальные вынужденные колебания в необрессоренных зонах тележек большой амплитуды. Аналоговый сигнал с датчика 2 поступает на вход фильтра низкой частоты 3, отсекающего высокочастотные составляющие "фона". С фильтра 3 сигнал поступает на вход аналого-цифрового преобразователя 4 и затем на вход элемента 5 расчета дисперсии спектра ускорений.
Далее сигнал поступает на вход в компаратор 6, на другой вход которого подается сигнал источника опорного "фонового" поля 7. При превышении дисперсии ускорений, измеренных на ходовой части тележки, значений "фонового" поля через логический элемент "ИЛИ" 8 на выходе компаратора 6 поступает управляющий сигнал на включение генератора радиоимпульсов 9, далее передатчиком сигнала, настроенным на частоту приема штатной системы радиосвязи локомотива, передается информация о сходе колесной пары с рельсов приемнику 10. Приемник 10 выдает сигнал подключенному к нему блоку автоматического включения тормозной системы 11.
Каждый функциональный блок А имеет автономный замкнутый цикл работы и напрямую связан со штатной системой радиосвязи локомотива.
Цикличное время анализа колебательных ускорений равно 4÷5 с. Питание блока А осуществляется либо от системы электропитания вагона (в пассажирских поездах), либо от автономного источника питания 12 (в грузовых поездах). Как вариант исполнения устройство может иметь блок ожидания 13, установленный на входе блока включения тормоза 11, дающий возможность машинисту локомотива принимать решение по выбору оптимальной схемы торможения в конкретных условиях нештатной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ КРИТИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА НА РЕЛЬСОВОМ ПУТИ И РЕГИСТРАЦИИ ЕГО СХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399524C1 |
| Система и способ управления пневматическим приводом балочного вагонного замедлителя | 2023 |
|
RU2800782C1 |
| УСТРОЙСТВО КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА | 2016 |
|
RU2622673C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ | 1998 |
|
RU2137632C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ СМАЗКИ НА РЕЛЬСЫ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2425768C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392141C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| СПОСОБ РЕГИСТРАЦИИ СХОДА ВАГОНА ПОДВИЖНОГО СОСТАВА С РЕЛЬСОВ | 1998 |
|
RU2137633C1 |
Изобретение относится к области железнодорожного транспорта и предназначено для обеспечения безопасности движения железнодорожного транспорта при пассажирских и грузовых перевозках. Способ основан на том, что в режиме "нон-стоп" отслеживают вертикальные колебательные ускорения, возникающие при движении состава на необрессоренных частях ходовых тележек вагонов, получая непрерывные электрические сигналы, которые преобразуют в низкочастотные дискретные сигналы с заданным шагом квантования. Затем оценивают дисперсию спектра колебательных ускорений в качестве временного информационного поля и сравнивают его с опорным "фоновым" полем. При превалировании временного информационного поля над "фоновым" идентифицируют сход и формируют управляющий сигнал для включения торможения состава. Идентификацию схода и формирование управляющего сигнала для каждой зоны отслеживания колебательных ускорений ведут в едином автономном замкнутом цикле, а управляющий сигнал формируют в виде сигнала дистанционной связи, например радиосигнала, подаваемого на приемник, связанный со штатной системой локомотива. Устройство выполнено в виде n-ряда независимых блоков, каждый из которых имеет прямую связь со штатной системой управления локомотива и представляет собой расположенные в корпусе последовательно соединенные датчик вертикальных колебательных ускорений, фильтр низкой частоты, аналого-цифровой преобразователь и элемент расчета дисперсии спектра ускорений, подключенный к входу компаратора, к другому входу которого подключен источник опорного "фонового" поля. Техническим результатом является повышение достоверности и быстродействия идентификации схода за счет упрощения алгоритма процесса, обеспечение оперативности нештатного торможения состава в безаварийном гибком режиме за счет достоверности и адресности оценки схода, сокращение временного интервала в цикле "сход - торможение", а также расширение технических возможностей устройства, упрощение и удешевление идентификации схода. 2 н. и 5 з.п. ф-лы, 1 ил.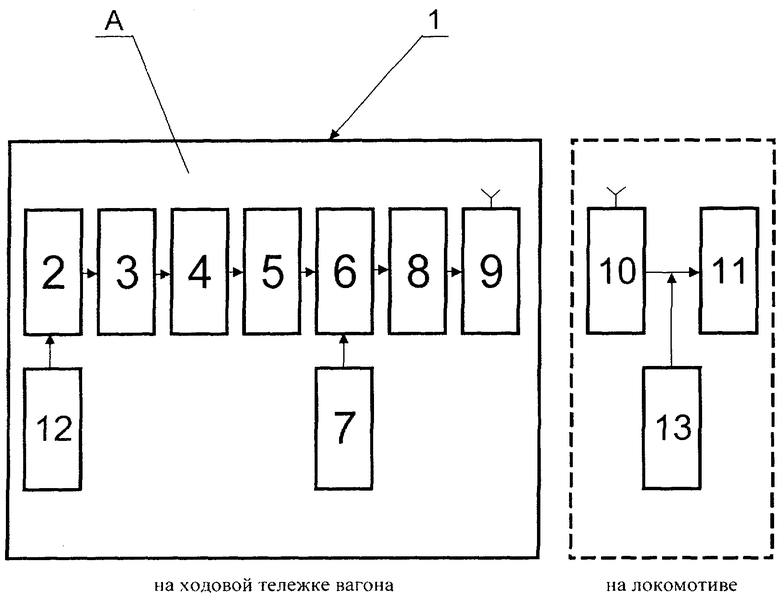
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ | 1998 |
|
RU2137632C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ С РЕЛЬСОВ | 1992 |
|
RU2025340C1 |
| Устройство для автоматического торможения поезда при сходе вагона с рельсов | 1987 |
|
SU1428627A1 |
| US 5499866 А, 19.03.1996 | |||
| US 3938765 А, 17.02.1976. | |||

