Изобретение относится к медицинской .технике, а именно к дозаторам лекарственных вер(еств, и может быть использовано для внутривенной инфу- зии.
Цель изобретения - повыщение точности дозирования биологической жидкости при малых расходах.
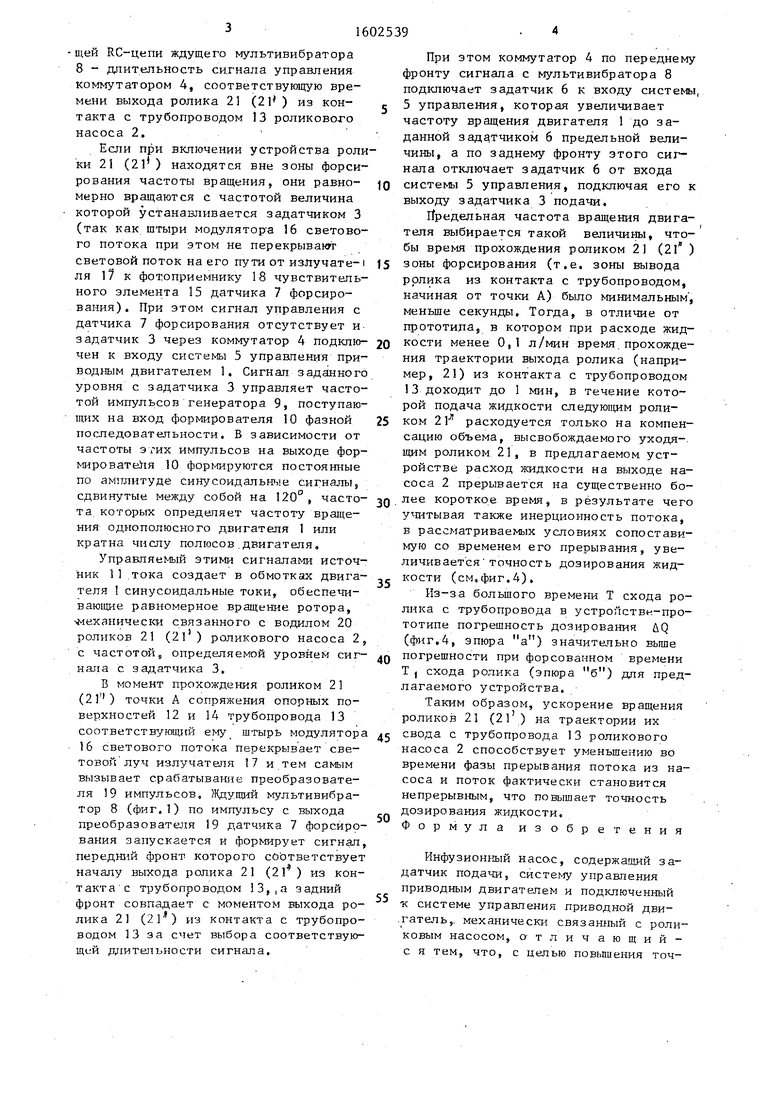
На фиг,1 представлена структурная схема инфузионного насоса; :на фиг.2- датчик форсирования; на фиг.З - вид А на фиг.2; на фиг,4 - эпюры потока жидкости.
Инфузионный насос содержит приводной двигатель 1, роликовый насос 2, задатчик 3 подачи жидкости, коммутатор 4, систему 5 управления приводным
двигателем, задатчик 6 предельной подачи, датчик 7 форсирования, ждущий мультивибратор 8, управляемый генератор 9, формирователь 10 фазной последовательности, управляемый источ-. ник 11 тока, цилиндрическую опорную по-, верхность 12, трубопровод 13, опорную .поверхность 14, чувствительный элемент 15, мод лятор 16, излучатель 17, фо- топриемник 18, преобразователь 19 импульсов, водило 20, ролики 21 (2 1 ) . Устройство работает следующим образом.
Задатчики 3 и 6 задают необходимую частоту вращения приводного двигателя 1 в основном и форсированном режимах, соответственно, а на времязадаюО5О 1чЭ СЛ
СО
щей RC-цепи ждущего мультивибратора 8 - длительность сигнала управления коммутатором 4, соответствующую времени выхода ролика 21 (21 ) из контакта с трубопроводом 13 роликового насоса 2,.
Если при включении устройства ролики 21 (2г) находятся вне зоны форсирования частоты вращения, они равно- д мерно вращаются с частотой величина которой устанавливается задатчиком 3 (так как штыри модулятор-а 16 светового потока при этом не перекрывают световой поток на его пути от излучате-1 |5 ля 1 к фотоприемнику 18 чувствительного элемента 15 датчика 7 форсирования). При этом сигнал управления с датчика 7 форсирования отсутствует и- задатчик 3 через коммутатор 4 подклю- 20 чен к входу системы 5 управления приводным двигателем 1. Сигнал заданного уровня с задатчика 3 управляет частотой импульсов генератора 9, поступающих на вход формирователя 10 фазной 25 последовательности, В зависимости от частоты этих импульсов на выходе фор- миpoвaтeitя 10 формируются постоянные по амплитуде ситгусоидальные сигналы, сдвинутые между собой на 120°, часто- 30 та которых определяет частоту вращения однополюсного двигателя 1 или кратна числу полюсов.двигателя.
Управляемый этими сигналами источник 11.тока создает в обмотках двигателя 1 синусоидальные токи, обеспечивающие равномерное вращение ротора, механически связанного с водилом 20 роликов 21 (2l ) роликового насоса 2, с частотой, определяемой уровнем сиг- AQ нала с задатчика 3,
В момент прохождения роликом 21 (21) точки А со.пряжения опорных поверхностей 12 и 14 трубопровода 13 соответствующий ему штырь модулятора дс 16 светового потока перекрывает световой луч излучателя 7 и тем самым вызывает срабатывание преобразователя 19 импульсов. Ждущий мультивибратор 8 (фиг,1) по имщ льсу с выхода преобразователя 19 датчика 7 форсирования запускается и формирует сигнал, передний фронт которого соответствует началу выхода ролика 21 (21 ) из кон- такта с трубопроводом 13,.а задний фронт совпадает с моментом выхода ролика 21 (21 ) из контакта с трубопроводом 13 за с чет выбора соответствующий длительности сигнала.
При этом коммутатор 4 по переднем фронту сигнала с мультивибратора 8 подключает задатчик 6 к входу систем 5 управления, которая увеличивает частоту вращения двигателя 1 до заданной задатчиком 6 предельной величины, а по заднему фронту этого сигнала отключает задатчик 6 от входа системы 5 управления, подключая его выходу задатчика 3 подачи.
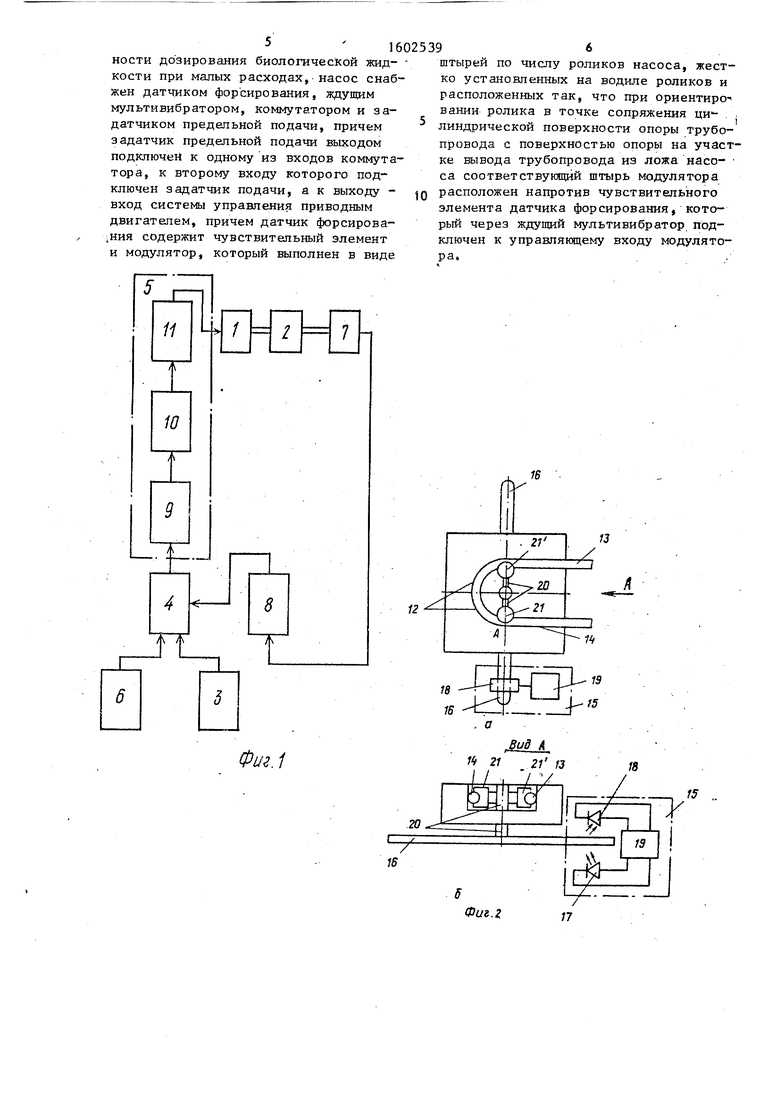
Йредельная частота вращения двигателя выбирается такой величины, что бы время прохождения роликом 21 (2l зоны форсирования (т.е. зоны вывода ролика из контакта с трубопроводом, начиная от точки А) было минимальным меньще секунды. Тогда, в отличие от прототида, в котором при расходе жидкости менее 0,1 л/мин время, прохождения траектории выхода ролика (например, 21) из контакта с трубопроводом 3 доходит до 1 мин, в течение которой подача жидкости следующим роликом расходуется только на компенсацию объема, высвобождаемого уходя-, щим роликом 21, в предлагаемом устройстве расход жидкости на выходе насоса 2 прерывается на существенно более короткое время, в результате чего у штывая также инерционность потока, в рассматриваемых условиях сопоставимую со временем его прерывания, увеличивается точность дозирования жидкости (см,фиг.4).
Из-за большого времени Т схода ролика с трубопровода в устройстве.-про- тотипе погрешность дозирования UQ (фиг.4, эпюра а) значительно вьщзе погрешности при форсованном времени Т , схода ролика (эпюра б) для предлагаемого устройства.
Таким образом, ускорение вращения роликотз 21 (2l ) на траектории их свода с трубопровода 13 роликового насоса 2 способствует уменьщению во времени фазы прерывания потока из насоса и поток фактически становится непрерывным, что повышает точность дозирования жидкости. Формула изобретения
Инфузиошшй насо.с, содержащий задатчик подачи, cиcтe fy управления приводным двигателем и подключенный к системе управления приводной дви- .гатепь,. механически связанный с роликовым насосом, атличающий- с я тем, что, с цепью повьщ1ения точW
. а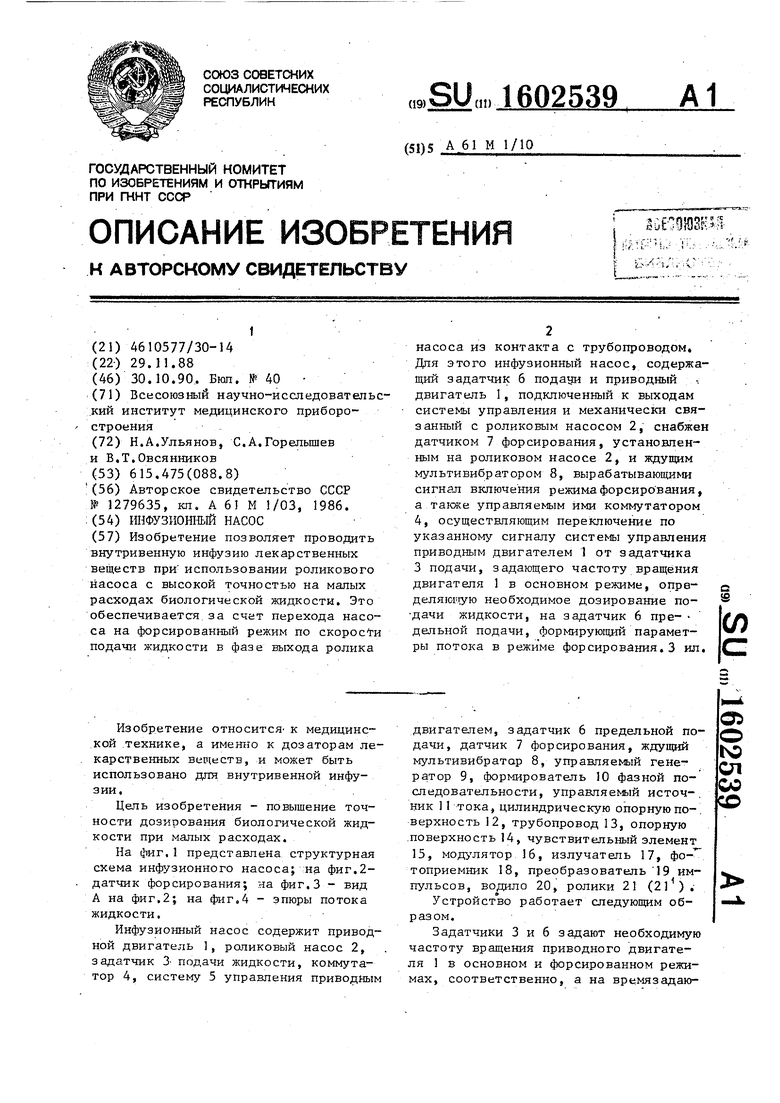
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФУЗИОННЫЙ НАСОС-ДОЗАТОР | 1991 |
|
RU2019191C1 |
| Инфузионный насос | 1988 |
|
SU1563702A1 |
| Перистальтический микронасос | 1991 |
|
SU1776346A3 |
| Инфузионный насос | 1984 |
|
SU1175492A1 |
| Опрыскиватель | 1987 |
|
SU1521420A1 |
| Инфузионный насос | 1982 |
|
SU1099967A1 |
| Устройство для управления двигателем внутреннего сгорания | 1983 |
|
SU1133430A1 |
| Устройство дозирования нагрузки при вытяжении | 1979 |
|
SU854393A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ШВЕЙНОЙ МАШИНЫ | 1992 |
|
RU2006169C1 |
Изобретение позволяет проводить внутривенную инфузию лекарственных веществ при использовании роликового насоса с высокой точностью на малых расходах биологической жидкости. Это обеспечивается за счет перехода насоса на форсированный режим по скорости подачи жидкости в фазе выхода ролика насоса из контакта с трубопроводом. Для этого инфузионный насос, содержащий задатчик 6 подачи и приводной двигатель 1, подключенный к выходам системы управления и механически связанный с роликовым насосом 2, снабжен датчиком 7 форсирования, установленным на роликовом насосе 2 , и ждущим мультивибратором 8, вырабатывающими сигнал включения режима форсирования, а также управляемым ими коммутатором 4, осуществляющим переключение по указанному сигналу системы управления приводным двигателем 1 от задатчика 3 подачи, задающего частоту вращения двигателя 1 в основном режиме, определяющую необходимое дозирование подачи жидкости, на задатчик 6 предельной подачи, формирующий параметры потока в режиме форсирования. 3 ил.
Фие.1
,
;« 2Г 21 13
/ , / V
18
Фиг. 2.
(Pug.3
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
