Изобретение относится к строительству и может быть использовано для погружения винтовых свай.
Цель изобретения - повышение производительности и упрощение конструкции устройства,
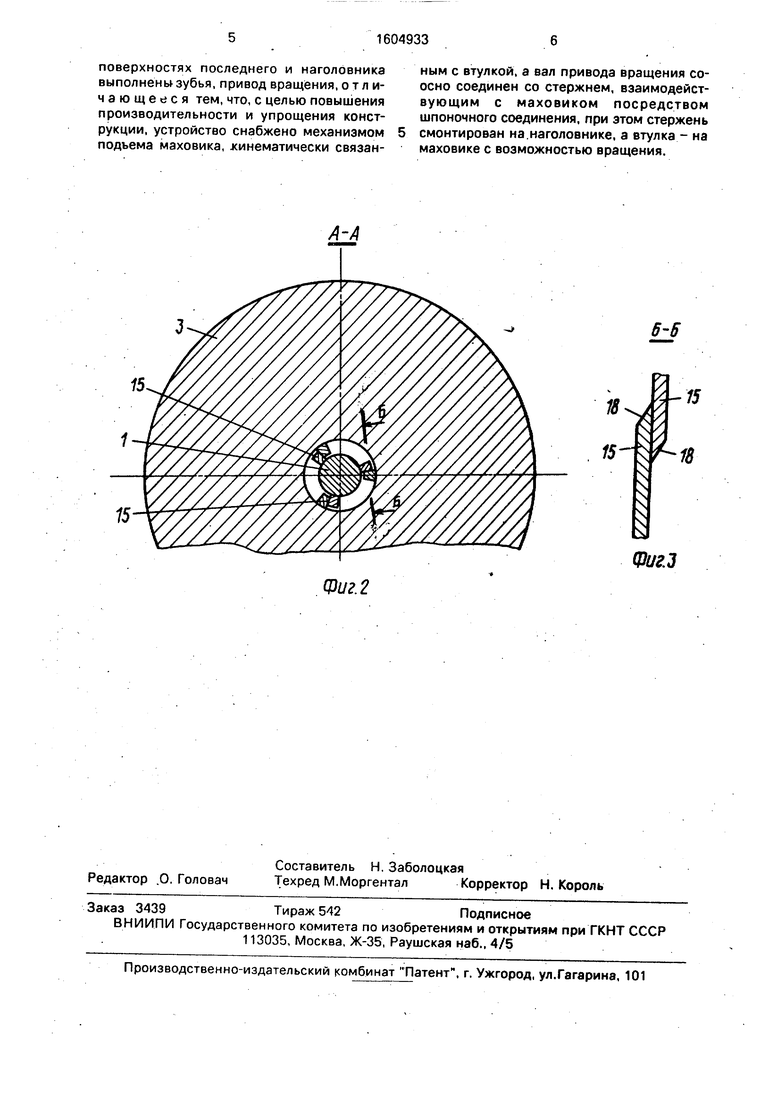
На фиг.1 представлено устройство для погружения винтовых свай в процессе подъема и раскручивания маховика, общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.2.
Устройство для погружения винтовых свай состоит из стержня 1, наголовника 2 и маховика 3, свободно установленного на стержне 1. Стержень 1 смонтирован на наголовнике 2 с возможностью вращения, что обеспечивается посредством упорного подшипника 4, На обращенных одна к другой поверхностях наголовника 2 и маховика 3 выполнены зубья 5. Маховик 3 снабжен со- осно закрепленной на нем через упорный подшипник 4 втулкой б. На кронштейне 7, соединенном с ползуном 8, скользящим по направляющей 9 копровой установки, смонтирован привод вращения, включающий двигатель 10 и муфту 11 сцепления с редуктором 12. Вал привода вращения соосно соединен со стержнем 1. Устройство снабжено механизмом подьема маховика 3 в виде приводных роликов 13 с секторными выступами 14, взаимодействующими с наружной поверхностью втулки 6, внутренний диаметр которой принимается не менее внутреннего диаметра маховика 3 (отверстия в маховике 3). На внутренней поверхности маховика 3 и наружной поверхности стержня 1 образованы шпоночные выступы 15, входящие в зацепление друг с другом при выходе из зацепления зубьев 5 маховика 3 и наголовника 2. Соединение винтовой сваи 16с наголовником 2 производится при помощи пальца 17, пропущенного через отверстия в наголовнике 2 и свае 16, Ролики
13могут быть прикреплены к дополнительному кронштейну (не показан), соединенному через ползун с направляющей копра.
Устройство для погружения винтовых свай работает следующим образом.
К наголовнику 2 присоединяют винтовую сваю 16 с помощью пальца 17. Затем включают привод вращения и механизм подъема. Под действием роликов 13, входящих в зацепление секторными выступами
14с помощью сил трения с втулкой 6, маховик 3 поднимается. При выходе из зацепления зубьев 5 маховика 3 и наголовника 2 входят в зацепление шпоночные выступы 15 стержня 1 и маховика 3, благодаря чему вращающий момент со стержня 1 передается на маховик 3. Для облегчения зацепления
. на нижних концах выступов 15 стержня 1 и верхних концах выступов 15 маховика 3 образованы скосы 18 (фиг.З). Под действием вращающего момента происходит раскру5 чивание маховика 3 параллельно с его подъемом, при этом втулка 6 совершает только поступательное осевое движение, благодаря чему повышается надежность зацепления секторных выступов 14 роликов 13 с
0 втулкой 6.
После выхода из зацепления выступов
14роликов 13 маховик 3 с втулкой 6 под действием сил тяжести падает вниз. Раскру5 чивание маховика 3 происходит до момента выхода из зацепления шпоночных выступов
15маховика 3 и стержня 1. При дальнейшем падении маховик 3 (после выхода из зацепления друг с другом выступов 15) своими
0 зубьями 5 входит е зацепление с зубьями 5 наголовника 2, в результате чего крутящий момент и осевое усилие передаются на винтовую сваю 16, которая погружается в грунт. Далее повторяется новый цикл работы уст5 ройства, причем количество циклов, необходимое для полного погружения сваи 16 на проектную отметку, зависит от размеров сваи 16, вида грунта, высоты падения маховика 3, его скорости вращения, массы и мо0 мента инерции. Момент инерции можно регулировать путем радиального перемещения специальных масс. Скорость вращения маховика 3 регулируется посредством редуктора 12, а высота подъема - путем изме5 нения угла сектора с выступом 14 роликов 13. Требуемое соотношение между крутящим моментом и осевым усилием, передаваемыми на сваю 16, обеспечивается подбором высоты подъема маховика 6; из0 менением скорости его вращения и момента инерции.
Совмещение во времени процессов подъема и раскручивания маховика, исключение процесса опускания траверсы и сни5 жение затрат времени на зацепление маховика траверсой позволяет в 1,4-1,6 раз сократить время одного цикла работы устройства, что обуславливает повышение его производительности. Кроме того, сущест0 венно упрощается конструкция устройства благодаря исключению из нее штанг с катками и массами на концах, опорного кольца и приспособления для снятия катков. Формула изобретения
5 Устройство для погружения винтовых свай, включающее соединенный посредст- 90М кронштейна направляющей копра стер- жень с наголовником, свободно установленные на стержне втулку и маховик, причем на обращенных одна к другой
поверхностях последнего и наголовника выполнена зубья, привод вращения, отличающееся тем, что, с целью повышения производительности и упрощения конструкции, устройство снабжено механизмом подъема маховика, хинематически связанным с втулкой, а вал привода вращения со- осно соединен со стержнем, взаимодействующим с маховиком посредством шпоночного соединения, при этом стержень смонтирован на.наголовнике, а втулка - на маховике с возможностью вращения.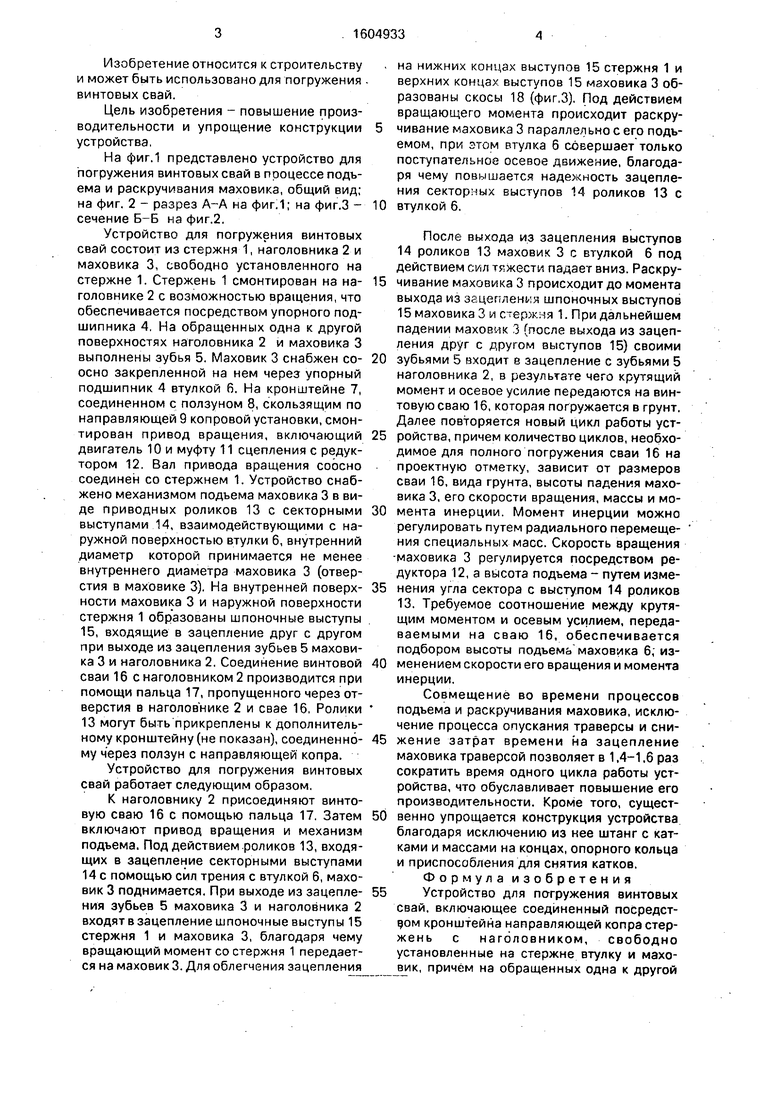
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погружения свай | 1989 |
|
SU1622522A1 |
| Устройство для погружения винтовых свай (его варианты) | 1984 |
|
SU1201410A1 |
| Устройство для погружения свай | 1988 |
|
SU1597420A1 |
| Устройство для погружения винтовых свай | 1984 |
|
SU1174533A1 |
| Устройство для погружения винтовых свай | 1984 |
|
SU1265242A1 |
| Устройство для погружения винтовых свай | 1982 |
|
SU1065542A1 |
| РАБОЧИЙ ОРГАН К УСТРОЙСТВУ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ | 1991 |
|
RU2021425C1 |
| Винтовая свая | 1982 |
|
SU1035134A1 |
| Установка для подводного бурения | 1986 |
|
SU1441048A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОНАБИВНОЙ СВАИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2076173C1 |
Изобретение относится к строительству и может быть использовано для погружения винтовых свай. Цель изобретения - повышение производительности и упрощение конструкции. Устройство состоит из стержня 1 с маховиком 3, который свободно установлен на стержне и снабжен соосно закрепленной на нем втулкой 6, наголовника 2 и привода вращения. На противоположных поверхностях маховика 3 и наголовника 2 выполнены зубья 5. Стержень 1 смонтирован на наголовнике 2, а втулка 6 закреплена на маховике 3 с возможностью вращения. Устройство снабжено приводными роликами 13 с секторными выступами 14, взаимодействующими с втулкой 6, а вал привода вращения соосно соединен со стержнем 1. Причем маховик 3 и стержень 1 оборудованы взаимодействующими друг с другом шпоночными выступами 15. При вращении ролики 13 своими выступами 14 входят в зацепление с втулкой 6, поднимая маховик 3 вверх. При выходе из зацепления зубьев 5 входят в зацепление выступы 15 и происходит раскручивание маховика 3 приводом вращения параллельно с его подъемом. После выхода из зацепления выступов 14 маховик 3 падает вниз, выходят из зацепления выступы 15 и входят в зацепление зубья 5, в результате чего крутящий момент и осевое усилие передаются на сваю 16, которая погружается в грунт. Далее повторяется новый цикл работы устройства. 3 ил.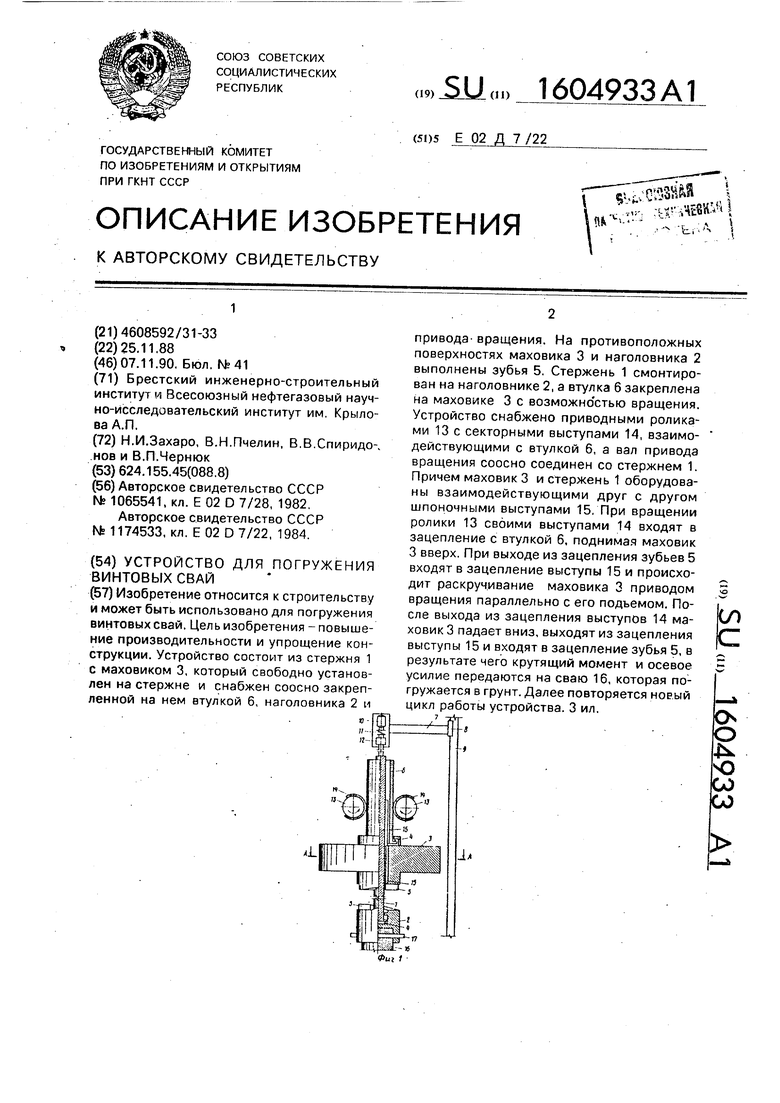
15
15
Фиг. 2
6-6
18
15
151В
Щиг.:з
| Устройство для погружения винтовых свай | 1982 |
|
SU1065541A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
