Изобретение относится к строительству и МГЧКРТ гит- использовано для погружения
FiMHTJRI 1д СВЭИ
, ит брртония - повышение надеж- i , рчбот ji и рлппирение области приме- н о н и я.
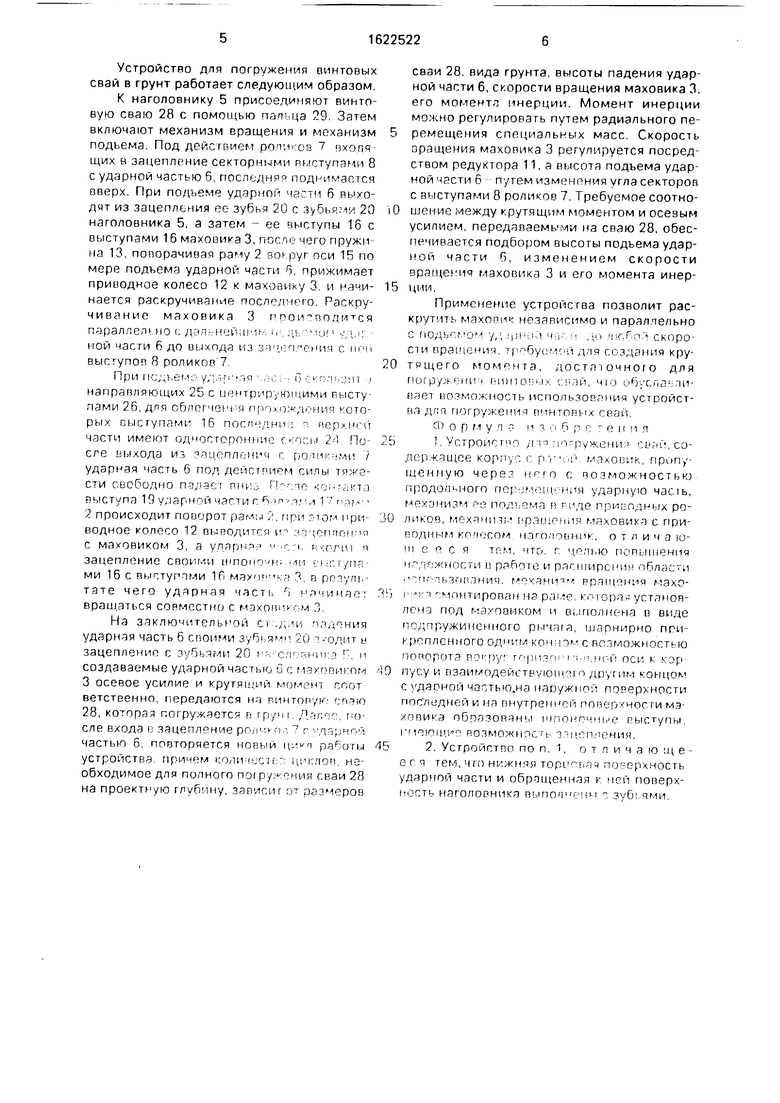
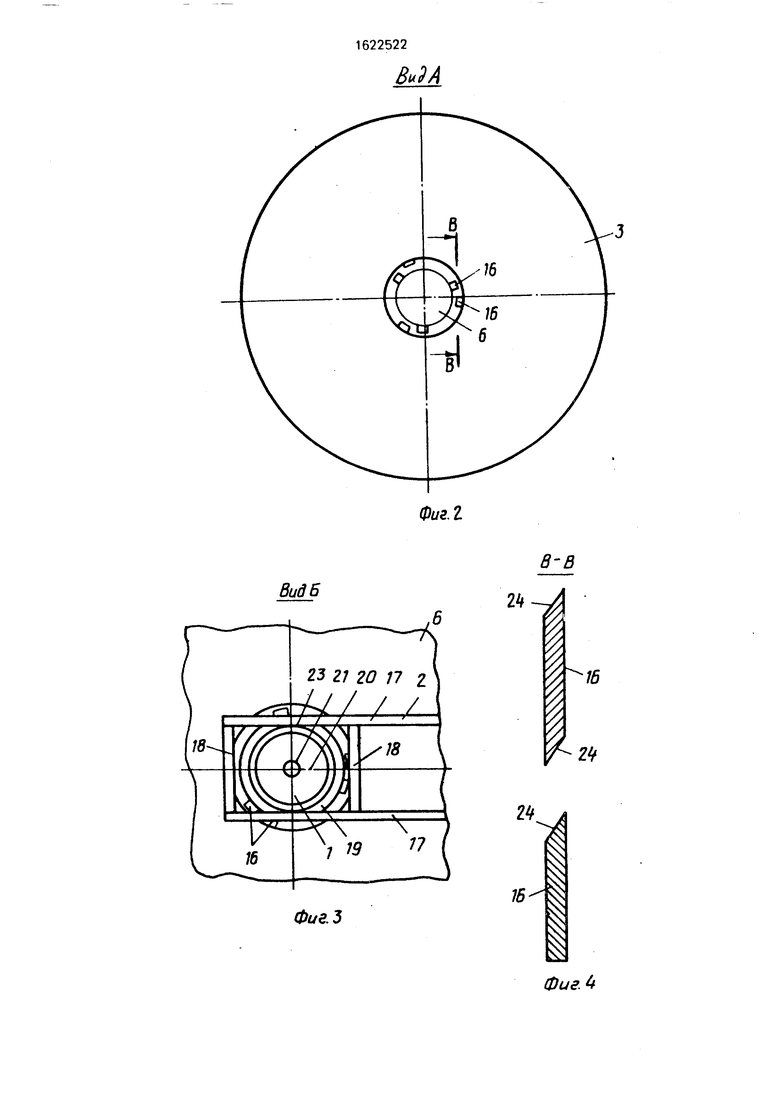
На фиг. 1 изображено устройство для погружения винтовых свай в процессе подъема ударной части и раскручивания мтхови- ка общий вид; на фиг 2 - вид А на фиг. 1; на фиг, 3 - вид Б на фиг. 1; на фиг. 4 - сечение В В на фиг. 2.
Устройство для погружения винтовых снай содержит корпус 1 с рамой 2 и маховиком 3 Корпус 1 установлен с возможностью перемещения в направляющих 4 копровой г тлиопки и опирается на нагоповник 5. Че- рп мд/OBi/n З свободно пропущена ударная час1|- подъем которой производится по- гредивом приводных роликов 7 с секторными выступами 8, взаимодействующими с наружной поверхностью ударной части 6. Маховик 3 установлен в корпусе 1 с возможностью вращения, что обеспечивается опорными подшипниками 9. Раскручивание маховика 3 приводится механизмом вращения, включающим двигатель 10, редуктор 11 и приводное колесо 12. В случае необходимости приводное колесо 12 может быть изготовлено в виде шестерни, в этом случае маховик 3 снабжается зубчатым венцом, взаимодействующим с шестерней (не показано).
Механизм вращения смонтирован на раме 2, установленной ниже маховика 3 Рама 2 выполнена в виде подпружиненного относительно корпуса 1 пружиной 13 рычага прикрепленного посредством шарнира 4 одним концом к корпусу 1 с возможностью поворота вокруг горизонтальной оси
15 и взаимодействующего другим концом с ударной частью 6. Жесткость пружины 3 подбирается такой, чтобы под действием силы тяжести ударной части 6 рама 2 поиорачивалась на угол достаточный для вывода из зацепления с маховиком 3 приводного колеса 12. На внутренней поверхности маховика 3 и наружной поверхности ударной части 6 образованы шпоночные выступы 16,
входящие в зацепление при выходе из зацепления приводного колеса 12 с маховиком 3 в процессе взаимодействия ударной части 6 с рамой 2. Рама 2 состоит из двух, балок 17, скрепленных МРЖДУ собой поперечными ригелями 18 с образованием отверстия для пропуска ударной части 6, которая снабжена кольцевым выступом 19, опирающимся при ее взаимодействии с рамой 2 на балки 17 последней
Контактирующие поверхности ударной
части 6 и наголовника 5 выполнены с зубьями 20, для повышения надежности зацепления которых ударная часть 6 оборудована центрирующим заостренным стержнем 21,
а наголовник 5 выполнен с отверстием 22 под стержень 21. Ударна-т часть 6 имеет переходной конусный участок 23 между выступом 19 и зубьями 20, что облег ает прохождение участка ударной части 6 с зубьями
20 через раму 2. Для облегчения зацепления на нижних концах выступов 16 ударной части 6 и верхних концах выступов 16 маховика 3 образованы односторонние скосы 24. Корпус 1 снабжен также направляющими 25 с
центрирующими выступами 26, имеющими в нижней части скосы 27. Соединение винтовой сваи 28 с наголовником 5 производится при помощи пальца 29. Направляющие 25 и ролики 7 могут быть прикреплены к
корпусу 1 (не показано)
Устройство для погружения винтовых свай в грунт работает следующим образом
К наголовнику 5 присоединяют винто вую сваю 28 с помощью пап ца °9 Затем включают механизм вращения и механизм подъема Под действием роп i с. 7 щих в зацепление секторными гшст/пами 8 с ударной частью 6 пос пьяна под имагтсч вверх При подъем 3 ударной б вихо дят из зацепления PC зубья 20 с зубья i 20 наголовника 5 а затем - ее чыгтупы 16 с выступами 16 маховика 3 погг негопружи на 13 порорачияая раму 2 BOI- руг оси 15 по мерр подъема ударной масти i прижимает приводное колесо 12 к махлпик/3 и начи- нается раскручивание послед KIO Рэскоу ч и в а н и е маховика 3 то и точится гаралпет но ( /in ни с 1 )
ной части 6 до выхода из , i i птния г ж выгтупоп 8 роликов 7
При IK ,Л1 t,f i i, i чГ i
направляющих 25 с ш итрир7 ющими гысту памп 26 для облог iet п i i k,ii нип ото
РЫ ВНСТу ПГМИ 16 ПОГП НИ - П ЧЗСТИ ИМРЮТ ОДМОГГОПОНп.Н Г П И 25 По
сге ьыходс) из п 1гпл1 нмч i I;QI 1 VH / ударная часть 6 по/1 деистПЦРМ ппы тя к сти свободно п яг nut i т т i 11 v части г п т 1 1 г ,
Р ПРОИСХОДИТ ПОВОРОТ |)3г1 1 ПГ И -104 При
водное 12 oi ип гпагч - с маховиком 3 а улар n i (-a r и ч
зацепление rBoi-r-n нтон 11 i /п ми 16 с чь | тутми 1f махмг в грп. п тате чего ударная част f . вра иат1ся совместно с мзхош м Т
На зчключительь ои ci /, -и г ь ния ударнэя часть 6 своими 3y6i /и nni-r н зацепление с .п1 20 и и
создаваемые ударной частью С м-упоп о 3 осевое усилие и крутян ии тот ветственно передаются н i i интоп/i тю 28 которая погружяетс г грун: Л и го еле рхода г зацепление рг i m, r частью б повторяется ц i
УСТРОИСТВЭ ПСИЧРМЮЛИ1 07i i Ч ПОП НЭ
обходимое для полного погру °нпя сваи 78 на проектную глуб1 ну DC мрров
свзи 28 вида грунта высоты падения удар ной части 6 скорости вращения маховика 3 его момента инерции Момент инерции мо -кно регулировать путем радиального пе ремещения специальных масс Скорость орзщения маховика 3 регулируется посред ством редуктора 11 в висота подъема удар ной 6 путем изменения угла секторов с at (ступами 8 роликов 7 Требуемое соотно- шпние между крутящим моментом и осезым усилием передаваемыми на сваю 28 обеспечивается подбором высоты подъема ударной части 6 изменением скорости вряще ия маховика 3 и его момента инер цпи
Применение устройства позволит рас- крутчть махопш независимо и паралтельно
i, i i ii гГ i л скоро сти Bpai u ни i ч б. i дтч создания кру тящего момента доста 0чного для по ру и m i иш о i ти ч i i i 6 f ла пи ЕМРТ Bo fo-KHOCTb игпо/1ьяор(1ния устроист m д я погр/ i- енит П НТОРЬ| CPJU
Г0 П р П у П I1 Q fl Р с РКП 1
строит п л i чени i со
ПРр КТЩС( K0ply ГПМ- л01 Иг- ПрОП
шенную чер° мг о г возможностью продольного к in н-я ударную часть 1НИЧМ пп/ч °мт с npivo IHI и ро аиюв мгхтнт i рчп г яхови п L при РОДНЫМ юп сом нтго оьн к отличаю
II С ° С Я ТГМ ЧТО г П Bt-llliPHHfl
ic4 ) нос ui п работе и рчгщирсни тПла и п i з н жич г аицт г ахо м iHTiipOBdn на р ) ° юрт-угтанов ленз под r-nvQQiikOM и BI полис HI в виде г дпружиненного pimra шапнирно при
К )10ГО О/ЛШТ КПП П С ВГЗГ/ОЖНПГ |ОПОрО1а II Пу г | -эг гни 0-и ц чтр,
пусу и пзаимодоиств ioin зю онцок1 с данной .Нс) наруж п 1 попррхногти пог/ еднри и Hri пнутренигп поп о нос ги ма об пазом ч ч in-онгч м е рыступы
1 ipiniii РОЗможн- 1 t II гмения
7 Устройство по п 1 о т п и ч а ю и е cri тем чю Ht-жнтя тпг т-ч-IQ грхчтсть дзрной части и оброщенная к поверх
НРГОЛОВНИЧ Э П1 1ПОП ill Чуб ЯМИ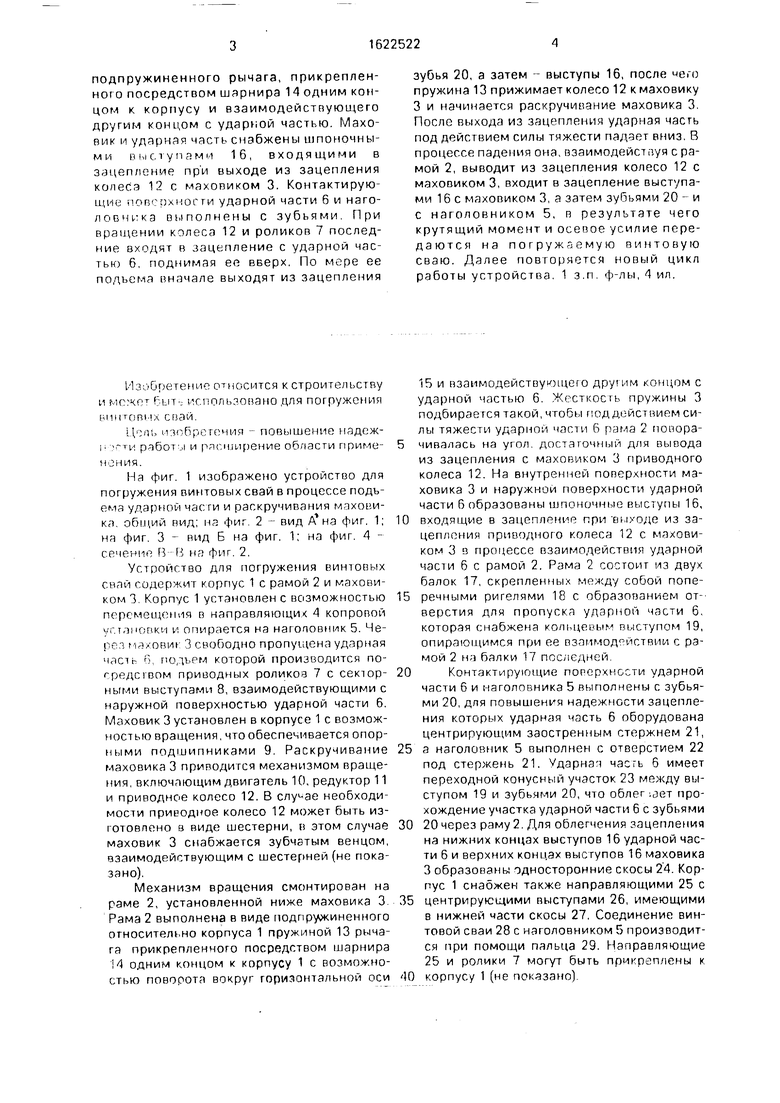
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погружения свай | 1988 |
|
SU1597420A1 |
| Устройство для погружения винтовых свай | 1988 |
|
SU1604933A1 |
| Устройство для погружения винтовых свай (его варианты) | 1984 |
|
SU1201410A1 |
| Установка для подводного бурения | 1986 |
|
SU1441048A1 |
| Устройство для погружения винтовых свай | 1984 |
|
SU1265242A1 |
| Устройство для погружения винтовых свай | 1984 |
|
SU1174533A1 |
| Устройство для погружения и извлечения сваи, шпунта | 1974 |
|
SU497379A1 |
| Сваебойный фрикционный молот | 1990 |
|
SU1765300A1 |
| Сваебойный фрикционный молот | 1988 |
|
SU1527380A1 |
| Наголовник для свай | 1982 |
|
SU1127948A1 |
Изобретение относится к строительству и может быть использовано для погружения винтовых свай. Цель изобретения - повышение надежности работы и расширение области использования. Устройство содержит корпус 1 с рамой 2 и маховиком 3 и наголовник 5. Через маховик 3 пропущена с возможностью продольного перемещения ударная часть 6, которая поднимается приводными роликами 7 с секторными выступами 8 Раскручивание маховика 3 производится приводом вращения с при- водным колесом 12. Механизм вращения смонтирован на раме 2, которая установлена ниже маховика 3 и выполнена в виде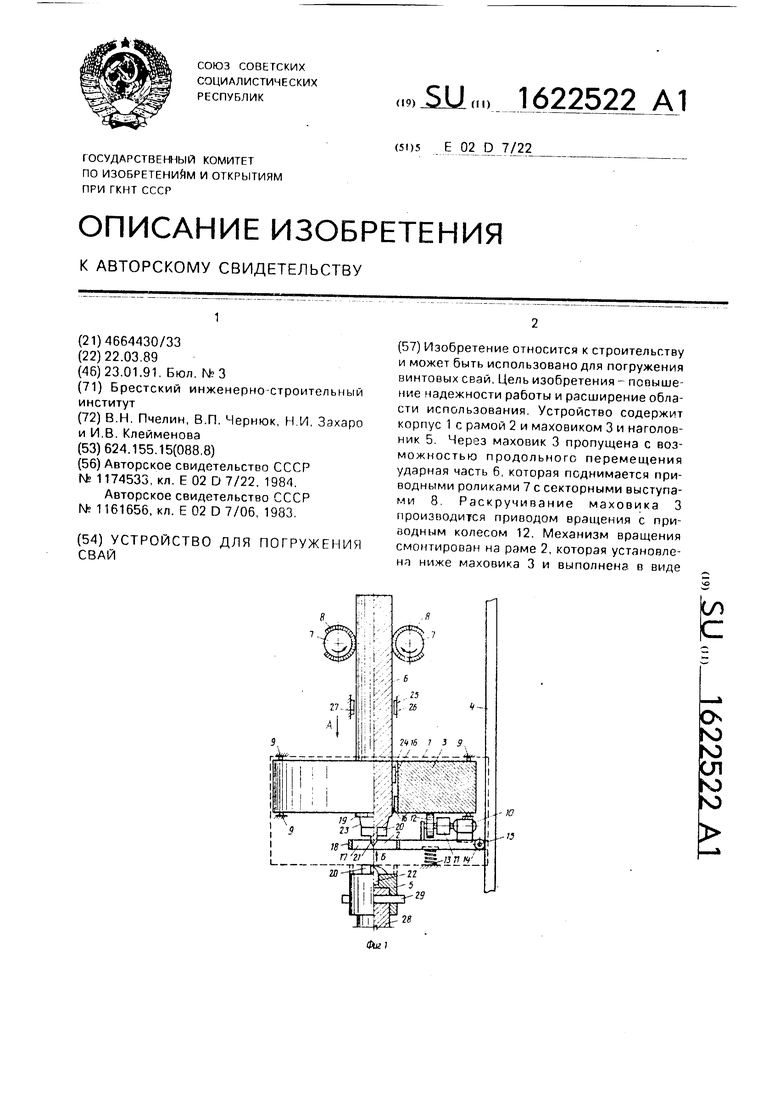
Вид Б
Фие.З
Фиг. I
Ik
А
16
г-гь
24
75
Фиг. Ь
| Устройство для погружения винтовых свай | 1984 |
|
SU1174533A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ударное устройство | 1983 |
|
SU1161656A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
