. Изобретение относится к машиностроению и приборостроению,, а именно к:, технике подвеса различных тел в управ- ляемом магнитном поле, и может найти применение5 например, при подвесе ро- торов в магнитных опорЪх, магнитном .подвесе высокоскоростного тразюпорта
и Т,П;:. .
Целью изобретения является сниже- 1ше энергопотребления магнитной опоры, при яоз,;ейстпии переменных квази- статиггеских Harijy-uiK,
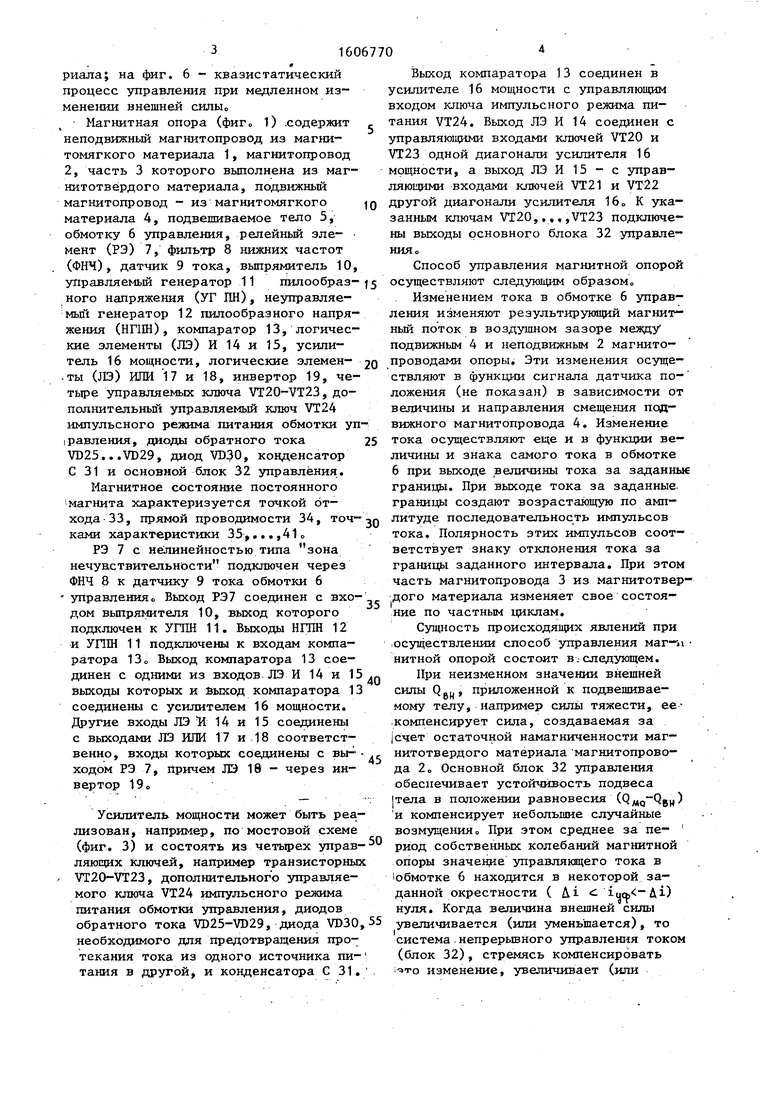
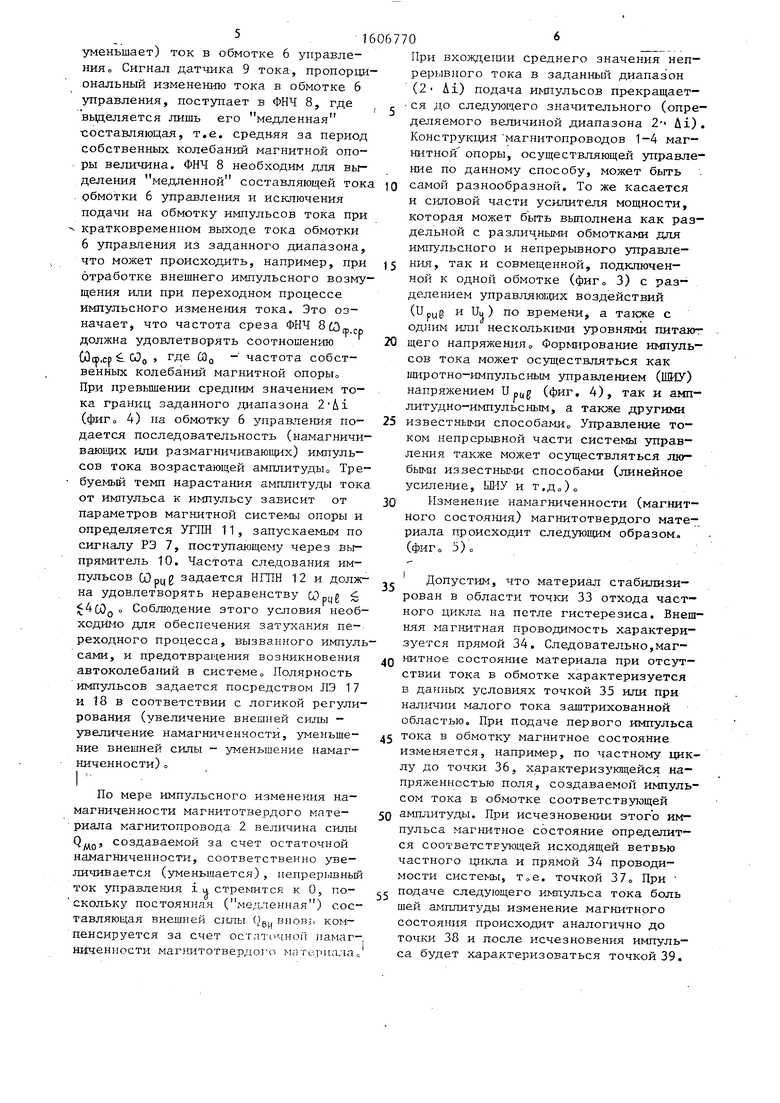
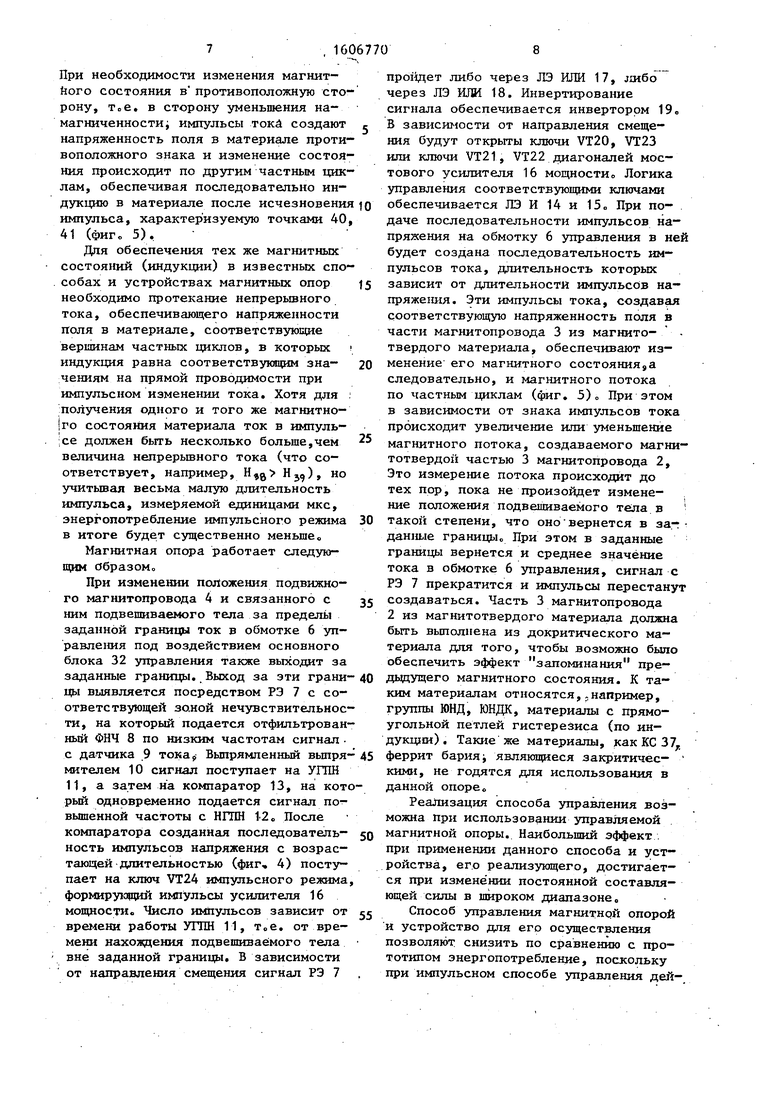
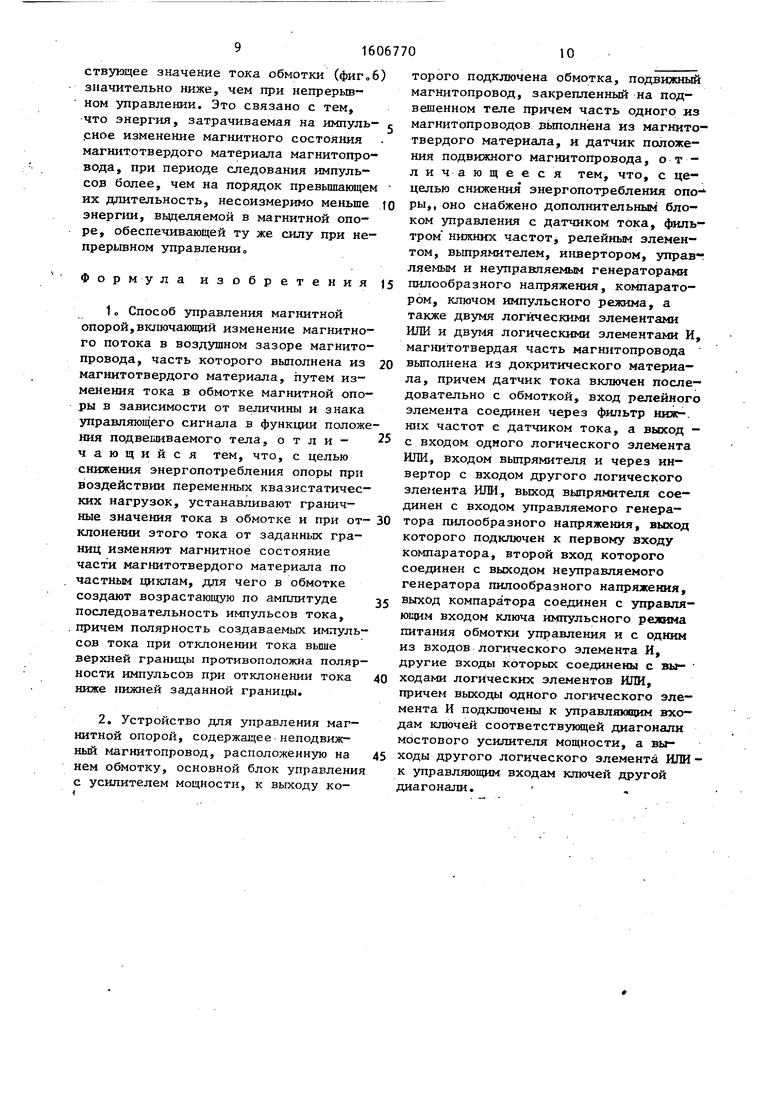
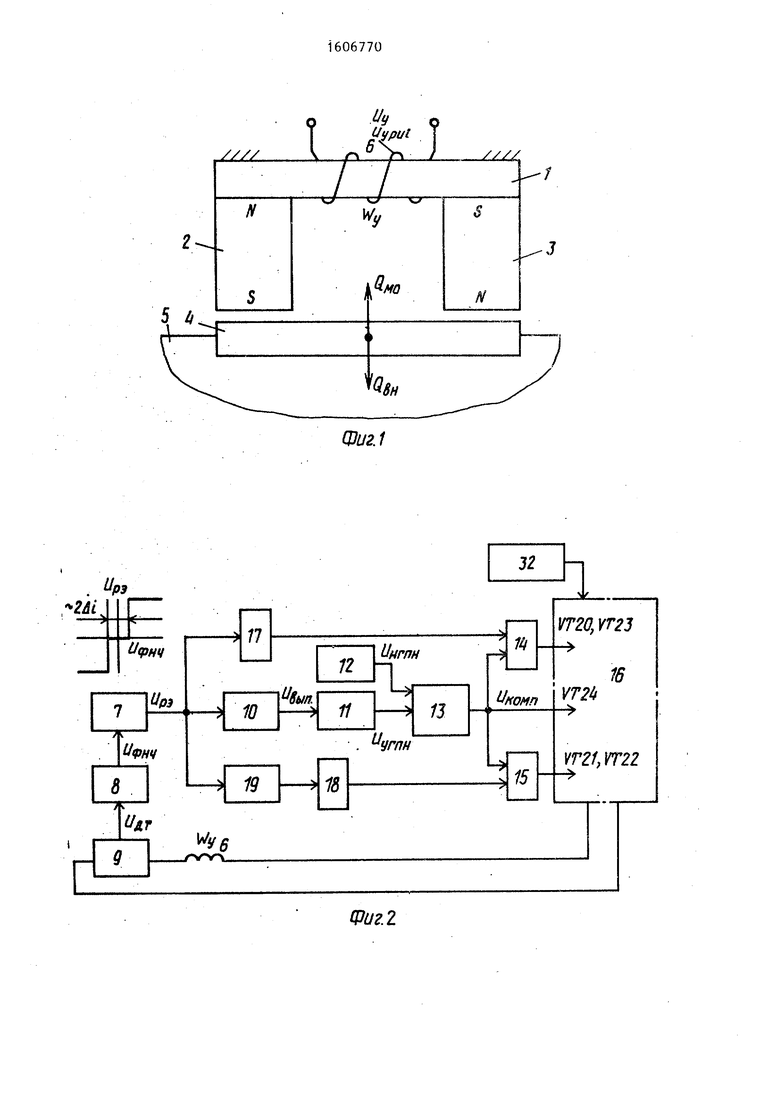
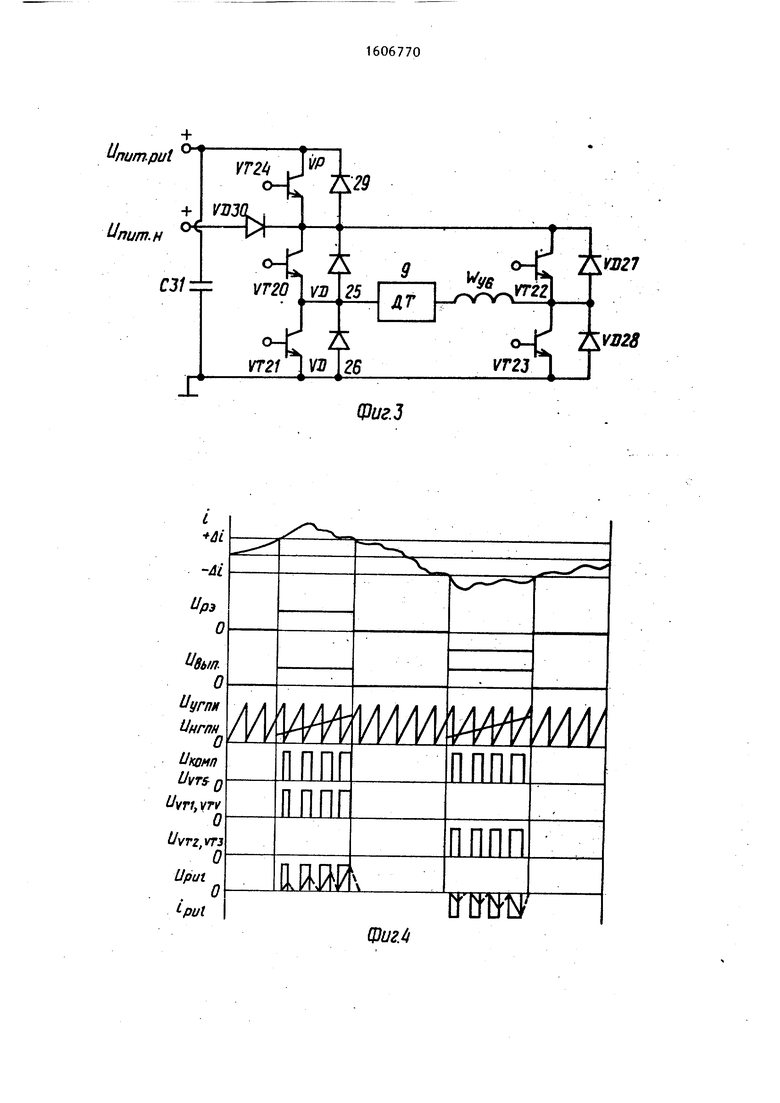
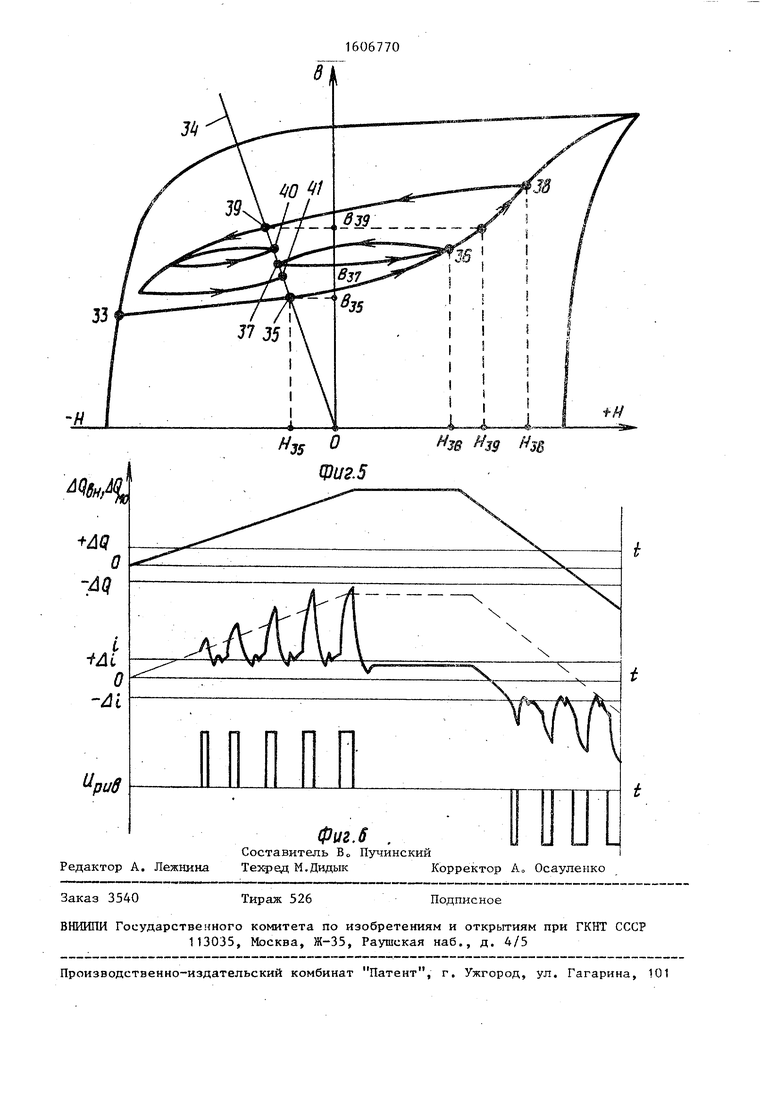
На фиг. 1 представлена схема -меха- нической части магнитной опоры с общей обмоткой управления; на фиг.2 - структурная схема формирователя импульсов тока; на фиг. 3 - пример выполнения усилителя мощности при совмещении непрерьшного и импульсного управления на одной обмотке; на фиг.4 - форма сигналов на выходе различных элементов формирователя импульсов тока; на фиг. 5 - процесс изменения намагниченно.сти магнитотвердого мате05О 05
иала; на фиг. 6 - квазистатический роцесс управления при медленном изенении внешней силыо
Магнитная опора (фиг 1) .содержит неподвижный магнитопровод из магни- томягкого материала 1, магнитопровод 2, часть 3 которого вьшолнена из маг- нитотвёрдого материала, подвижный магнитопровод - из магнитомягкого д материала 4, подвешиваемое тело 5, обмотку 6 управления, релейный элемент (РЭ) 7, фильтр 8 нижних частот (ФНЧ), датчик 9 тока, выпрямитель 10, управляемый генератор 11 пилообраз- 5 ного напряжения (УГ 1Ш), неуправляе- Mbrii генератор 12 пилообразного напряжения (НПШ), компаратор 13, логические элементы (ЛЭ) И 14 и 15, усилитель 16 мощности, логические элемен- 20 ты (ЛЭ) ИЛИ 17 и 18, инвертор 19, четыре управляемых ключа VT20-VT23, до- полнительньп управляемый ключ VT24 импульсного режима питания обмотки уп-; равления, диоды обратного тока 25 VD25...VD29, диод VD30, конденсатор С 31 и основной блок 32 управления. Магнитное состояние постоянного магнита характеризуется точкой отхода 33, прямой проводимости 34, точ-2Q
ками характеристики 35,..,41е,
РЭ 7 с нелинейностью типа зона
нечувствительности подключен через
ФНЧ 8 к датчику 9 тока обмотки 6
управления Выход РЭ7 соединен с входом вьшрягштеля 10, выход которого подключен к УПШ 11. Выходы НГПН 12
и УПШ 11 подключены к входам компаратора 13о Выход компаратора 13 соединен с одними из входов ЛЭ И 14 и 15 дд выходы которых и йыход компаратора 13 соединены с усилителем 16 мощности. Другие входы ЛЭ И 14 и 15 соединены с выходами ЛЭ ИЛИ 17 и 18 соответственно, входы которых соединены с вы- ., ходом РЭ 7, причем ЛЭ 18 - через инвертор 19 о
Усилитель мощности может быть реализован, например, по мостовой схеме (фиг. 3) и состоять из четырех управ- ляющих ключей, например транзисторных
VT20-VT23, дополнительного управляемого ключа VT24 импульсного режима питания обмотки управления, диодов обратного тока VD25-VD29, диода VD30,55 необходимого для предотвращения протекания тока из одного источника пи- тания в другой, и конденсатора С 31,
35
Q
д ,
5
5
Выход компаратора 13 соединен в усилителе 16 мощности с управляющим входом ключа импульсного режима питания VT24. Выход ЛЭ И 14 соединен с управляющими входами ключей VT20 и VT23 одной диагонали усилителя 16 мощности, а выход ЛЭ И 15 - с управляющими входами ключей VT21 и VT22 другой диагонали усилителя 16 К указанным ключам VT20,,,.,VT23 подключены выходы основного блока 32 управлеНИЯо
Способ управления магнитной опорой осуществляют следующим образом
Изменением тока в обмотке 6 управления изменяют результирующий магнитный поток в воздушном зазоре между подвижным 4 и неподвижным 2 магнито- проводами опоры. Эти изменения осуществляют в функции сигнала датчика по- ложения (не показан) в зависимости от величины и направления смещения подвижного магнитопровода 4. Изменение тока осуществляют еще и в функции величины и знака самого тока в обмотке 6 при вьпсоде величины тока за заданные границы. При выходе тока за заданные, границы создают возрастающую по амплитуде последовательность импульсов тока. Полярность этих импульсов соответствует знаку отклонения тока за границы заданного интервала. При этом часть магнитопровода 3 из магнитотвер- дого материала изменяет свое состояние по частным циклам.
Сущность происходящих явлений при осуществлении способ управления маг-ii нитной опорой состоит в.-следующем.
При неизменном значении внешней силы Q аи приложенной к подвешиваемому телу, например силь тяжести, ее- (Компенсирует сила, создаваемая за |с:чет остаточной намагниченности маг- нитотвердого материала магнитопрово- да 2о Основной блок 32 управления обеспечивает устойчивость подвеса тела в положении равновесия () и компенсирует небольшие случайные возмущения При этом среднее за пе- риод собственньгх колебаний магнитной опоры значение управляющего тока в обмотке 6 находится в некоторой заданной окрестности ( Д1 «с 1ио,-Д1) нуля. Когда величина внешней силы увеличивается (или уменьшается), то система.непрерывного управления током (блок 32), стремясь компенсировать ЧТО изменение, увеличивает (или
уменьшает) ток в обмотке 6 управления,, Сигнал датчика 9 тока, пропорциональный изменению тока в обмотке 6 управления, поступает в ФНЧ 8, где вьщеляется лишь его медленная составляющая, т.е. средняя за период собственных колебаний магнитной опоры величина. ФНЧ 8 необходим для выделения медленной составляющей тока обмотки 6 управления и исключения подачи на обмотку импульсов тока при кратковременном выходе тока обмотки 6 управления из заданного диапазона, что может происходить, например, при отработке внешнего импульсного возмущения или при переходном процессе импульсного изменения тока. Это означает, что частота среза ФНЧ 8йф(.р должна удовлетворять соотношению СОср.ср СОд где СЗо - частота собственных колебаний магнитной опоры При превьш1ении средним значением тока границ заданного диапазона 2 Ai (фиго 4) па обмотку 6 управления подается последовательность (намагничивающих или размагничивающих) импульсов тока возрастающей амплитуды Тре- буемый темп нарастания амплитуды тока от импульса к импульсу зависит от параметров магнитной системы опоры и определяется УГЛИ 11, запускаемым по сигналу РЭ 7, поступающему через выпрямитель 10. Частота следования импульсов COpyg задается НГПН 12 и должна удовлетворять неравенству COnyg и Соблюдение зтого условия необходимо для обеспечения затухания переходного процесса, вызванного импульсами, и предотвращения возникновения автоколебаний в системе Полярность импульсов задается посредством ЛЭ 17 и 18 в соответствии с логикой регулирования (увеличение внешней силы - увеличение намагниченности, уменьшение внешней силы - уменьшение намагниченности) о 1
По мере импульсного изменения намагниченности магнитотвердого материала кагнитопровода 2 величина силы , создаваемой за счет остаточной намагниченности, соответственно увеличивается (уменьшается), пепрерывньй
160
ток управле1-шя i и стремится к О, по- скольку постоянная (медленная) составляющая внешней С1шы Qg, вновь компенсируется за счет остлточиоГг намаг-, ниченности магнитотвердоч-- мйтерпалас
1606770
При вхож;п,е1ши среднего значения непрерывного тока в заданный диапаз он (2- Ai) подача импульсов прекращает- ся до следующего значительного (определяемого величиной диапазона 2- Д1). Конструкция магнитопроБодов 1-4 магнитной опоры, осуществляющей управление по данному способу, может быть
самой разнообразной. То же касается и силовой части усилителя мощности, которая может быть выполнена как раздельной с различ ными обмотками для импульсного и непрерывного управления, так и совмещенной, подключенной к одной обмотке (фиго 3) с разделением управляюЕщх воздействий (иpug Uu ) по времени, а также с одним или несколькими уровнями питающего напряжения о Формирование импульсов тока может осуществляться как широтно-импульсным управлением (ШИУ) напряжением (фиг. 4), так и амплитудно-импульсным, а также другими
известными способами Управление током непрерьшной части системы управления также может осуществляться любыми известньЕ-ш способами (линейное усиление, ЫИУ и т.д)
Изменение намагниченности (магнитного состояния) магнитотвердого материала происходит следующим образом, (фиго 5)о
Допустим, что материал стабилизирован в области точки 33 отхода частного цикла на петле гистерезиса. Внешняя мападтная проводимость характеризуется прямой 34. Следовательно,магнитное состояние материала при отсутствии тока в обмотке характеризуется в дан}1ых условиях точкой 35 или при наличии малого тока заштрихованной областью. При подаче первого импульса тока в обмотку магнитное состояние
изменяется, например, по частному циклу до точки 36, характеризующейся напряженностью поля, создаваемой импульсом тока в обмотке соответствующей амплитуды. При исчезновении этого импульса магнитное состояние определится соответствующей исходящей ветвью частного Ц11кла и прямой 34 проводимости системы, Тое. точкой 37 При подаче следующего и 0Iyльca тока боль ей амплитуды изменение магнитного состояния происходит аналогично до ОХ1КИ 38 и после исчезновения импульа будет характеризоваться точкой 39.
При необходимости изменения магнит- horo состояния в противоположную сторону, Тое. в сторону уменьшения намагниченности импульсы TOKd создают напряженность поля в материале противоположного знака и изменение состояния происходит по другим частным циклам, обеспечивая последовательно индукцию в материале после исчезновения импульса, характеризуемую точками 40, 41 (фиго 5).
Для обеспечения тех же магнитных состояний (индукции) в известных способах и устройствах магнитных опор необходимо протекание непрерьшного тока, обеспечивающего напряженности поля в материале, соответствующие вершинам частных циклов, в которых индукция равна соответствующим зна- чениям на прямой проводимости при импульсном изменении тока. Хотя для получения одного и того же магнитно- jro состояния материала ток в импуль- :се должен быть несколько больше,чем величина непрерьшного тока (что соответствует, например, Н, Hj,), но учитывая весьма малую длительность импульса, измеряемой единицами мкс, энергопотребление импульсного режима в итоге будет существенно меньше
Магнитная опора работает следующим образом
При изменении положения подвижного магнитопровода 4 и связанного с ним подвешиваемого тела за предель заданной границы ток в обмотке 6 управления под воздействием основного блока 32 управления также выходит за заданные границы. Выход за эти грани- цы выявляется посредством РЭ 7 с соответствующей зоной нечувствительности, на который подается отфильтрованный ФНЧ 8 по низким частотам сигнал с датчика 9 тока Выпрямленный вьшря- мителем 10 сигнал поступает на УП1Н 11, а затем на компаратор 13, на который одновременно подается сигнал повышенной частоты с НГПН 1-2« После компаратора созданная последователь- ность импульсов напряжения с возрастающей длительностью (фиг, 4) поступает на ключ VT24 импульсного режима формирующий импульсы усилителя 16 мощности. Число импульсов зависит от времени работы УГПН 11, Тое. от времени нахояддения подвешиваемого тела вне заданной границы, В зависимости от направления смещения сигнал РЭ 7
провдет либо через ЛЭ ИЖ 17, либо через ЛЭ ИЛИ 18. Инвертирование сигнала обеспечивается инвертором 19. В зависимости от направления смещения будут открыты ключи VT20, VT23 или ключи VT21, VT22 диагоналей мостового усилителя 16 мощностио Логика управления соответствующими ключами обеспечивается ЛЭ И 14 и 15о При подаче последовательности импульсов напряжения на обмотку 6 управления в не будет создана последовательность импульсов тока, длительность которых зависит от длительности импульсов на- пряжешш. Эти импульсы тока, создавая соответствующую напряженность поля в части магнитопровода 3 из магнито- твердого материала, обеспечивают изменение его магнитного состояния,а следовательно, и магнитного потока по частным циклам (фиг. 5)о При этом в зависимости от знака импульсов тока происходит увеличение или уменьшение магнитного потока, создаваемого магни тотвердо частью 3 магнитопровода 2, Это измерение потока происходит до тех пор, пока не произойдет изменение положения подвешиваемого тела в такой степени, что оно вернется в заданные границы. При этом в заданные границы вернется и среднее значение тока в обмотке 6 управления, сигнал с РЭ 7 прекратится и импульсы перестану создаваться. Часть 3 магнитопровода 2 из магнитотвердого материала должна быть выполнена из докритического материала для того, чтобы возможно было обеспечить эффект запоминания пре- дьщущего магнитного состояния. К таким материалам относятся,.например, группы ЮНД, ЮНДК, материалы с прямоугольной петлей гистерезиса (по ин- дукщш). Такие же материалы, как КС 37, феррит барияi являющиеся закритичес- кими, не годятся для использования в данной опоре
Реализация способа управления возможна при использовании управляемой магнитной опоры. Наибольший эффект . при применении данного способа и устройства, его реализующего, достигается при изменении постоянной составляющей силы в широком диапазоне.
Способ управления магнитной опорой и устройство для его осуществления позволяют снизить по сравнению с прототипом энергопотребление, поскольку при импульсном способе управления действуюцее значение тока обмотки (фиг„ значительно ниже, чем при непрерьт- ном управлении. Это связано с тем, что энергия, затрачиваемая на импуль .сное изменение магнитного состояния магнитотвердого материала магнитопро вода, при периоде следования импульсов более, чем на порядок превышающе их длительность, несоизмеримо меньше энергии, вьщеляемой в магнитной опоре, обеспечивающей ту же силу при непрерывном управлении
Формула изобретения
1 о Способ управления магнитной опорой,включающий изменение магнитного потока в воздушном зазоре магнито- провода, часть которого выполнена из магнитотвердого материала, путем изменения тока в обмотке магнитной опоры в зависимости от величины и знака управляющего сигнала в функции положения подвешиваемого тела, о т л и - чающийся тем, что, с целью снижения энергопотребления опоры при воздействии переменных квазистатических нагрузок, устанавливают граничные значения тока в обмотке и при от- клонении этого тока от заданных границ изменяют магнитное состояние части магнитотвердого материала по частным циклам, для чего в обмотке создают возрастающую по амплитуде последовательность импульсов тока, причем полярность создаваемых импульсов тока при отклонении тока выше верхней границы противоположна полярности импульсов при отклонении тока ниже нижней заданной границы.
2. Устройство для управления магнитной опорой, содержащее неподвиж- ньй Iaгнитoпpoвoд, расположенную на нем обмотку, основной блок управления с усилителем мощности, к выходу которого подключена обмотка, подвизашй магнитопровод, закрепленный на подвешенном теле причем часть одного из магнитопроводов вьшолнёна из магнитотвердого материала, и датчик положения подвижного магнитопровода, отличающееся тем, что, с це- целью снижения энергопотребления опо ры,, оно снабжено дополнительным блоком управления с датчиком тока, фильтром нижних частот, релейным элементом, выпрямителем, игшертором, управг ляемым и неуправляемым генераторами пилообразного напряжения, компаратором, ключом импульсного режима, а также двумя логическими элементами ИЛИ и двумя логическими элементами И, магнитотвердая часть магнитопровода выполнена из докритического материала, причем датчик тока включен последовательно с обмоткой, вход релейного элемента соединен через фильтр нняг-. них частот с датчиком тока, а выход - с входом одного логического элемента ИЛИ, входом выпрямителя и через инвертор с входом другого логического элемента ИЛИ, выход выпрямителя соединен с входом управляемого генератора пилообразного напряжения, выход которого подключен к первому входу компаратора, второй вход которого соединен с выходом неуправляемого генератора пилообразного напряжения, выход компаратора соединен с управляющим входом ключа импульсного режима питания обмотки управления и с одним из входов логического элемента И, другие входы которых соединены с вы- ходами логических элементов ИЛИ, причем выходы одного логического элемента И подключены к управляющим входам ключей соответствукнцей диагонали мостового усилителя мощности, а выходы другого логического элемента ИЛИ- к управляющим входам ключей другой диагонали.
////
N
Ug .
a
I
////
1
Wu
s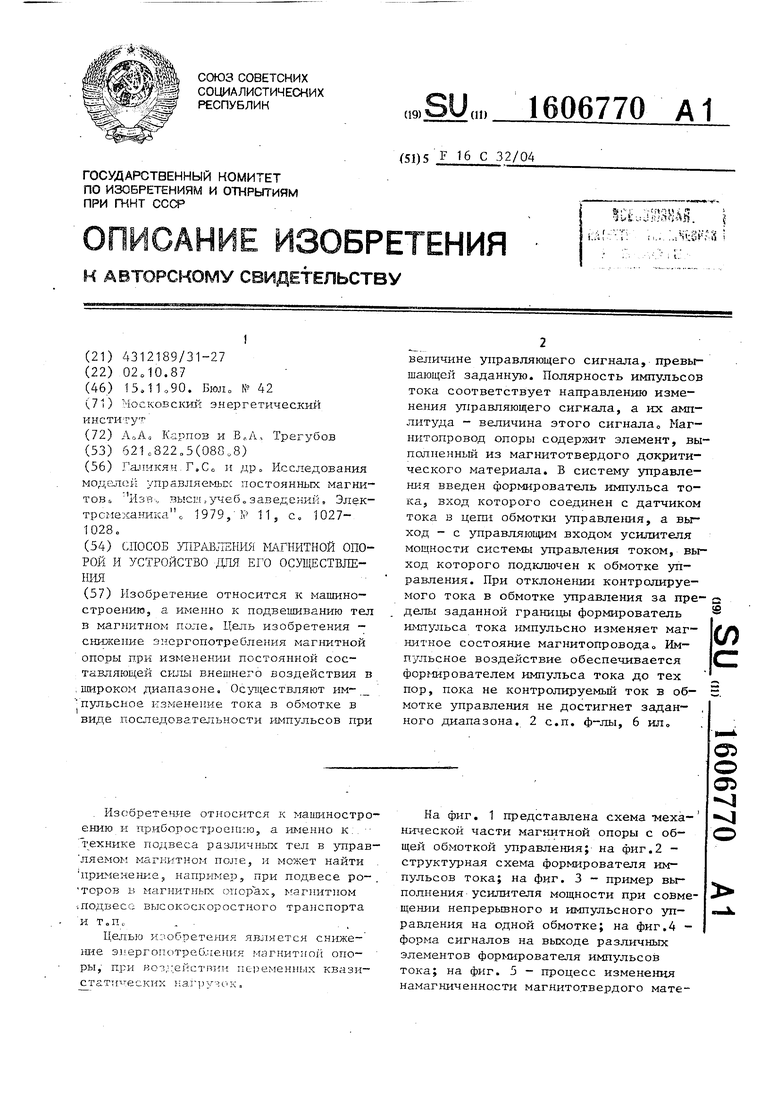
| название | год | авторы | номер документа |
|---|---|---|---|
| Повторитель сигнала переменного и постоянного напряжения | 2022 |
|
RU2776256C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| ЯЧЕЙКА УСТРОЙСТВА СЧИТЫВАНИЯ ФОТОПРИЕМНЫХ МАТРИЦ С АНАЛОГО-ЦИФРОВЫМ ПРЕОБРАЗОВАНИЕМ | 2014 |
|
RU2554646C1 |
| Помехоустойчивый триггер | 1988 |
|
SU1688402A1 |
| Магнитный структуроскоп | 1983 |
|
SU1128154A1 |
| Бесконтактный стабилизированный по напряжению генератор переменного тока с комбинированным возбуждением | 2019 |
|
RU2713470C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И НАСТРОЙКИ ПАРАМЕТРОВ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 1992 |
|
RU2013854C1 |
| Измерительный преобразователь постоянного тока | 1982 |
|
SU1150566A1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕГИСТРАЦИЕЙ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК МАГНИТОТВЕРДЫХ МАТЕРИАЛОВ | 1998 |
|
RU2130634C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2509307C1 |
Изобретение относится к машиностроению, а именно к подвешиванию тел в магнитном поле. Цель изобретения - снижение энергопотребления магнитной опоры при изменении постоянной составляющей силы внешнего воздействия в широком диапазоне. Осуществляют импульсное изменение тока в обмотке в виде последовательности импульсов при величине управляющего сигнала, превышающей заданную. Полярность импульсов тока соответствует направлению изменения управляющего сигнала, а их амплитуда - величине этого сигнала. Магнитопровод опоры содержит элемент, выполненный из магнитотвердого докритического материала. В систему управления введен формирователь импульса тока, вход которого соединен с датчиком тока в цепи обмотки управления, а выход - с управляющим входом усилителя мощности системы управления током, выход которого подключен к обмотке управления. При отклонении контролируемого тока в обмотке управления за пределы заданной границы формирователь импульса тока импульсно изменяет магнитное состояние магнитопровода. Импульсное воздействие обеспечивается формирователем импульса тока до тех пор, пока не контролируемый ток в обмотке управления не достигнет заданного диапазона. 2 с.п. ф-лы, 6 ил.
Фиг.1
Фиг.2
iMO
/У/
num.pui
и.
num. и
C31±i
L
-лг
Up3
%//7.
UymM
Инглн 0
икомп UVTS Q
UyTi,yTV 0
Uvrz,vT3 0
Uput 0
f-pul
(Риг,3
J
53
рив
Редактор А. Лежнияа
Фиг.§ ,
Составитель В Пучинский
Тезфед М.Дидык Корректор А Осауленко
Заказ 3540
Тираж 526
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/3
Подписное
| Галикян,Г,Со и др Исследования моделс управляемьк постоянных магнитов Изв, вь сы,учеб„заведений | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| ПРИВОД ДЛЯ ПЛОСКОЙ ВЯЗАЛЬНОЙ МАШИНЫ | 1923 |
|
SU1027A1 |
