//
(Л С
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь углов наклона объекта (его варианты) | 1981 |
|
SU994914A1 |
| Устройство для определения пространственного угла наклона объекта | 1977 |
|
SU714147A1 |
| Преобразователь углов наклона | 1980 |
|
SU970105A1 |
| Устройство для определения пространственного угла наклона объекта | 1982 |
|
SU1068707A2 |
| Дифференциальный индуктивно-емкостный преобразователь углов наклона (его варианты) | 1980 |
|
SU994913A1 |
| Устройство для определения изменения углов наклона объекта | 1975 |
|
SU561866A1 |
| Указатель-сигнализатор угла наклона объекта | 1976 |
|
SU655897A1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| Двухкоординатный наклономер | 1979 |
|
SU838339A1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
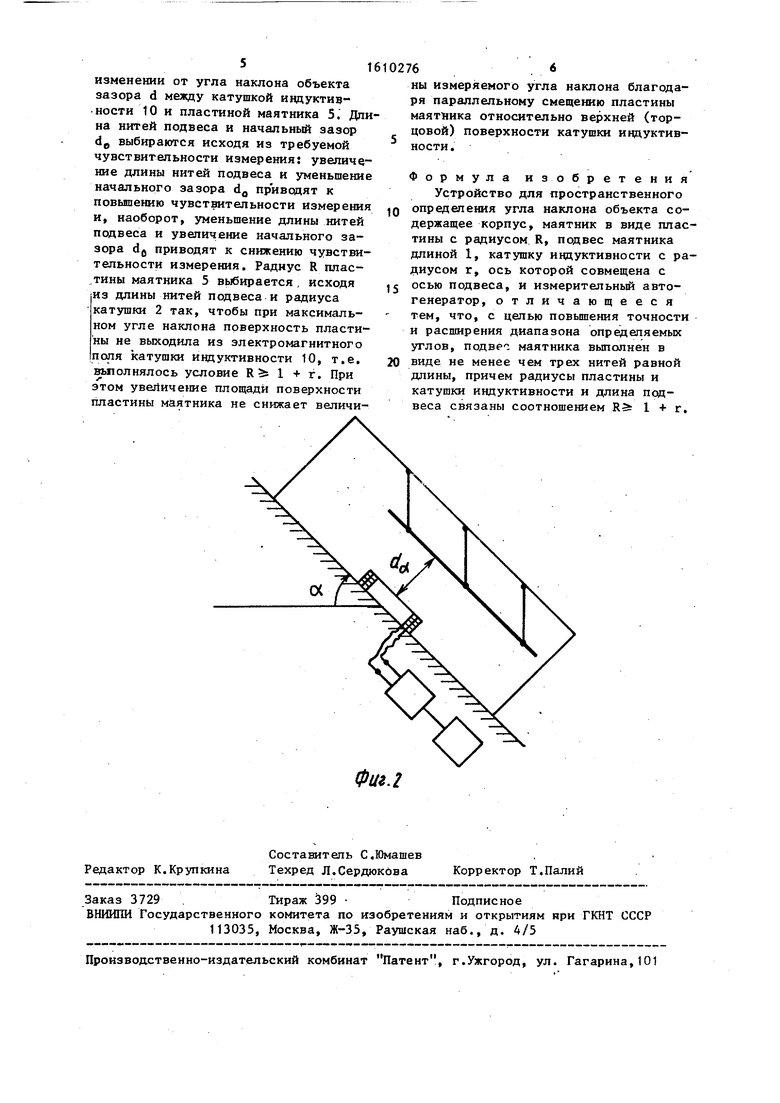
Изобретение относится к измерительной технике и служит для определения угла наклона относительно горизонтальной плоскости. С целью повышения точности и расширения диапазона определяемых углов подвес маятника 5 выполнен в виде трех нитей 2 - 4 равной длины, что позволяет сохранять параллельность между плоскостями пластины маятника 5 и катушки индуктивности 10. Радиус R пластины маятника 5 выбирается исходя из длины L нитей подвеса 2 - 4 и радиуса R катушки 10 так, чтобы при максимальном угле наклона поверхность пластины 5 не выходила из электромагнитного поля катушки индуктивности 10. 2 ил.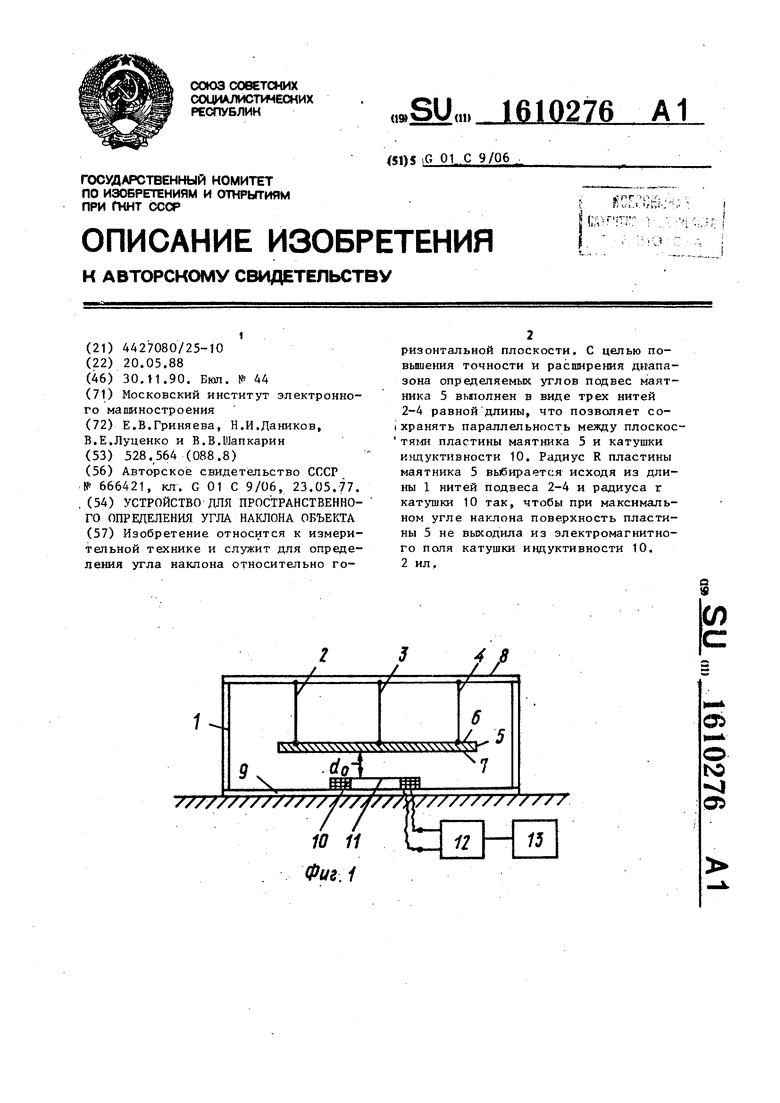
bS
Л.ЧУЧЧХХУЧУО
УОчХЧЛ
flVI
/Х//УУ
10 11 Фиг i
О
5
KSK
У
//////// / / // /
сзь
o
OfJ
п
15
Изобретение относится к измерь- тельной технике, в час тности к устройствам для пространственного определения угла наклона объекта относительно горизонтапьяой плоскости в электрический сигнал,
Цепыр изобретения является повышение точности и расширение диапазона определяемых углов.
На фиг. 1 показана конструкция предлагаемого устройства с тремя нитяными подвесами;- на фиг. 2 - схема конструкции предлагаемого устройства при угле наклона о(, объекта относительно горизонтальной плоскости.
Устройство содержит корпус 1, внутри которого минимум на трех нитях 2-4 одинаковой длины подвешен -к внутренней поверхности плоской крышки корпуса 1 плоский маятни к 5, выполненный из электропроводящего материала. Верхняя 6 и нижняя 7 поверхности пластины маятника 5 параллельны внутренним поверхностям плоских Крьппки 8 и основания 9 корпуса 1 устройства. -В основании 9 корпуса 1 укреплена катушка ивдуктивности 10,.верхняя (торцовая) поверхность которой 11 параллельна нижней 7 поверхности пластины маятника 5. Данные поверхности расположены друг относительно друга с некоторым начальным зазором dg. Катушка ивдуктивности 10 включена в контур измерительного автогенератора 12, выход .которого соединен с электронной схемой 13 реобразования выходного сигнала автогенератора 1-2.
Устройство работает следзтош 1м обазом.
В исходном положении объекта (уговой наклон устройства 06 О уг.град.) катушка индуктивности 10 расположена относительно пластины маятника 5 с минимальным начальным зазором dj и обладает при этом макси- мальньм активным и минимальным индуктивным сопротивлениями, а измерительный автогенератор 12 имеет максимальную выходную частоту, что и фиксируется электронной схемой 13 преобразования выходного сигнала автогенератора 12. При скалярном наклоне объёкта на угач об относительно горизонта происходит параллельное смещение пластины маятника 5 относительно верхней (торцовой) поверхности катушки ивдуктивности 10. При этом.зазор
d между поверхностями пластины маят0
5
ника 5 и катушки издуктивности 10 всегда увеличивается при увеличении угла наклона объекта от своего минимального значения dj до своего максимального значения d, максимальном угле наклона объекта. Это приводит к снижению активного и повышению индуктивного сопротивлений катушки 0 iивдуктивности 10 и, как следствие,
к уменьшению по сравнению с начальной, выходной частоты измерительного автогенератора 12, что и фиксируется электронной схемой 13 выходного сигна- 5 ла автогенератора 12. Так как начальный зазор dg между чувствительными к углу наклона элементами устройства изменяется от св.оего минимального значения только в сторону увеличения 0 ПР увеличении угла наклона объекта , то выходная частота измерительного -, автогенератора 12 изменяется от своего начального (максимального) значения только в сторону уменьшения вы- 5 ходной частоты автогенератора. Параллельное смещение при изменении угла наклона объекта в скалярном направлении взаимодействующих. с другом пластины маятника 5 и катупжи ивдуктивности 10 осуществляется благодаря подвесу маятника минимум на трех нитях 2, 3 и 4 одинаковой длины к внутренней поверхности плоской крьш1ки 8 корпуса 1, параллельной в свою очередь .верхней (торцовой) поверхности катушки 10 индуктивности. Число нитей подвеса маятника может бьп-ь и болышм, но при этом обяза- тельн$1м является условие равенства д по длине всех нитей подвеса, так как только это условие позволяет осу- ществлять параллельное смещение взаимодействующих поверхностей пластины
маятника 5 и катушки индуктивности
5 10с плоскопараллельным изменением зазора между ними. При этом конфигурации .электромагнитных полей катушки ивдуктивности и вихревых токов, наводимых катушкой ивдуктивности в ма0 териале пластины маятника, всегда лмеют цилиндрическую форму с центральной симметрией, определяемой . центром катушки индуктивности, а следовательно, и максимальньм взаимо , действием между этими электромагнитными, полями, что позвашет получить высокую точность измерения. Интенсивно-:. взаимодействия электромагнитных полей изменяется только;npji
| Устройство для определения простарнственного угла наклона объекта | 1977 |
|
SU666421A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
