Предполагаемое изобретение относится к измерительной технике и может быть использовано в энергетике, строительстве и других отраслях, где необходимо контролировать наклон и вибрацию при малых величинах параметров и малых частотах виброперемещения, в частности, в сейсмологии.
Из уровня техники известны датчики наклона и вибрации, содержащие подвешенный внутри корпуса маятник в форме груза на конце подвеса и установленные на грузе подвижные части двухкоординатного датчика перемещения, который закреплен на корпусе. Подвес выполнен гибким и не имеет шарнира в месте крепления к корпусу (см. заявки JPH09304168 (А), опубликована 28.11.1997, JPH0650754 (А), опубликована 25.02.1994).
Недостатком известных устройств является то, что они склонны к генерации паразитных виброперемещений из-за недостаточно жесткого подвеса, а также не могут контролировать малые наклоны и виброперемещения с малой частотой из-за влияния имеющейся изгибной жесткости подвеса в месте крепления к корпусу.
Также из уровня техники известен датчик наклона, содержащий подвешенный внутри корпуса маятник, подвес которого выполнен в виде стержня и прикреплен к корпусу шарниром из плоской пружинной полосы, а груз помещен в полости, заполненной вязкой жидкостью, выполняющей функцию демпфера колебаний маятника (см. заявка GB 862045 (А), опубликована 01.03.1961).
Недостатком данного устройства является то, что шарнир в этом устройстве обладает изгибной жесткостью, препятствующей контролю наклона с высоким разрешением и вибрации с малым ускорением.
Наиболее близким техническим решением к предложенному изобретению является датчик наклона и вибрации, содержащий корпус с размещенным в нем маятником в виде стержня с грузом на конце, подвешенным к корпусу посредством шарнира Гука, а также емкостные датчики перемещения, установленные парами ортогонально друг другу около груза, и демпфирующее устройство в виде электромагнитов, связанных с датчиками перемещения обратной связью (см. заявка JPS58193415 (А), опубликована 11.11.1983).
Недостатком наиболее близкого решения является то, что оно не позволяет контролировать виброперемещение и наклон с высоким разрешением из-за люфтов и трения в шарнире Гука, имеющем две угловые степени свободы.
Технической проблемой, решаемой изобретением, является устранение перечисленных недостатков известного решения.
Техническим результатом изобретения, обеспечивающим решение технической проблемы, является повышение разрешения при контроле малых величин наклона и виброперемещения с малым ускорением (10-5-10-4 м/с2) в произвольном горизонтальном направлении.
Технический результат изобретения достигается благодаря тому, что датчик наклона и вибрации содержит корпус и расположенные внутри него маятник в виде стержня с грузом на конце, подвешенный внутри корпуса другим концом посредством шарнира с двумя угловыми степенями свободы, а также демпфирующее устройство и по меньшей мере два преобразователя перемещения, установленные равноудаленно от оси маятника и смещенные друг относительно друга на 90° по окружности с центром на оси стержня маятника, при этом подвижные части преобразователей перемещения соединены с маятником, шарнир составлен из шайбы, имеющей на каждом торце по одной выполненной диаметрально и перпендикулярно противоположной канавке треугольного сечения, вершины которых расположены в одной плоскости, кольцевого ограничителя, установленного по периметру шайбы, и установленных в канавках ножей, верхний из которых присоединен к стержню маятника, а нижний - к раме, закрепленной на корпусе, причем, преобразователи перемещения - индуктивного типа установлены на раме и ориентированы вдоль оси маятника, а их подвижные части расположены в плоскости вершин канавок и установлены на поперечных рычагах, прикрепленных к стержню маятника.
Кроме того, шайба шарнира может быть выполнена из магнитотвердого материала, намагничена в направлении 45°±20° от вершин канавок, ножи могут быть выполнены из магнитного материала, а кольцевой ограничитель - из немагнитного.
Кольцевой ограничитель шарнира может быть установлен по наружному периметру шайбы.
Шайба может быть снабжена осевым отверстием, а кольцевой ограничитель шарнира может быть установлен по внутреннему периметру шайбы.
Кроме того, каждый преобразователь перемещения может быть выполнен в виде двух дифференциально включенных катушек индуктивности, оси которых параллельны оси маятника, обращенные друг к другу торцы расположены в плоскости вершин канавок, а подвижная часть может быть выполнена в форме цилиндра, расположенного с зазором в полости внутри катушек.
Кроме того, датчик может содержать четыре преобразователя перемещения, каждый из которых может быть выполнен в виде индуктивного датчика близости с переменным магнитным сопротивлением, причем, "вторичные обмотки датчиков близости, расположенных диаметрально, включены дифференциально, а подвижные части могут быть выполнены в виде пластин.
Кроме того, один из ножей шарнира может быть присоединен к стержню маятника посредством блока поперечных рычагов.
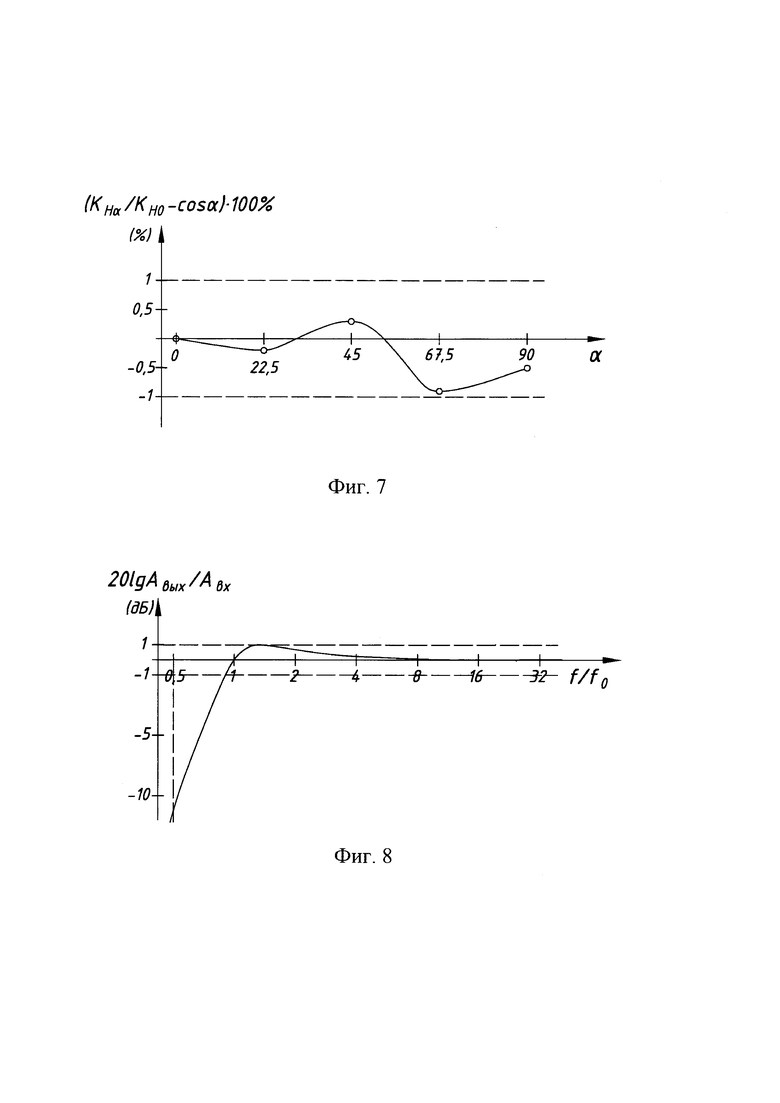
Изобретение поясняется чертежами, где на фиг. 1 показано осевое сечение предложенного датчика, в котором преобразователи перемещения выполнены в виде двух пар дифференциально включенных катушек индуктивности с сердечниками; на фиг. 2 показан разрез А-А на фиг. 1; на фиг. 3 показан разрез Б-Б на фиг. 1; на фиг. 4 показана часть осевого сечения предложенного датчика, в котором преобразователи перемещения выполнены в виде индуктивных датчиков близости с переменным магнитным сопротивлением; на фиг. 5 показан разрез В-В на фиг. 4; на фиг. 6 показан разрез Г-Г на фиг. 4; на фиг. 7 показана зависимость погрешности измерения наклона от угла положения вертикальной плоскости, в которой производится наклон, относительно вертикальной плоскости, в которой установлен преобразователь перемещения; на фиг 8 показана амплитудно-частотная характеристика датчика при контроле виброперемещения.
Датчик наклона и вибрации содержит корпус 1, преимущественно, цилиндрической формы. Внутри корпуса 1 установлена рама 2, которая жестко закреплена на внутренней цилиндрической поверхности корпуса 1. Также внутри корпуса 1 соосно ему (в исходном положении) расположен маятник, который подвешен внутри корпуса 1 одним своим концом к раме 2 посредством ножевого шарнира с двумя угловыми степенями свободы. Маятник выполнен в виде стержня 3, на конце которого (нижнем, противоположном концу, которым маятник подвешен к раме 2) закреплен груз 4.
Шарнир, посредством которого подвешен маятник к раме 2, включает в себя шайбу 5, кольцевой ограничитель 6 и два ножа 7 и 8 (верхний и нижний соответственно). Ножи 7 и 8 выполнены из магнитного материала и расположены перпендикулярно друг другу. При этом верхний нож 7 жестко соединен со стержнем 3 маятника, а сам маятник подвешен внутри корпуса 1 одним (верхним) концом на ноже 8, который жестко соединен с рамой 2. Кольцевой ограничитель 6 выполнен из немагнитного материала и установлен по периметру шайбы 5. Кольцевой ограничитель 6 предназначен для позиционирования оси маятника относительно оси шарнира и имеет небольшой зазор между своей стенкой и боковыми сторонами ножей 7, 8.
Шайба 5 на каждом своем торце имеет по одной продольной канавке 9, причем каждая канавка 9 выполнена (прорезана) диаметрально (вдоль диаметра шайбы 5) и имеет треугольное сечение. Таким образом, одна диаметральная канавка 9 выполнена на одной плоской стороне шайбы 5 (сверху), а другая диаметральная канавка 9 выполнена на другой плоской стороне шайбы 5 (снизу), причем канавки 9 расположены перпендикулярно друг другу. Вершины обеих канавок 9 расположены в одной плоскости, которая перпендикулярна оси маятника в исходном его положении.
Ножи 7 и 8 установлены внутри канавок 9 (введены своими остриями в канавки 9), причем верхний нож 7 установлен в верхней канавке 9, а нижний нож 8 установлен в нижней канавке 9.
Шайба 5 изготовлена из магнитотвердого материала и намагничена в направлении 45±20° от вершин канавок 9. Преимущественно, шайба 5 намагничена в направлении 45° от вершин канавок 9. Однако она может быть намагничена и под другим углом, например, в направлении 65° от вершины одной канавки 9 и 25° от вершины другой канавки 9, или, например, в направлении 55° от вершины одной канавки 9 и 35° от вершины другой канавки 9, или под другим углом в указанном диапазоне. Причем, чем больше угол намагничивания в направлении от соответствующей канавки 9, тем больше усилие прижатия соответствующего ножа 7 или 8 к своей канавке 9.
Датчик также содержит демпфирующее устройство, расположенное в основании датчика (в нижней части корпуса 1), которое образовано из груза 4 совместно с постоянным магнитом 10 и его полюсным наконечником 11. При этом груз 4 изготовлен из электропроводного и немагнитного материала и выполнен в форме перевернутого стакана, цилиндрическая часть которого расположена в кольцевой полости между корпусом 1 и полюсным наконечником 11 с зазором как по отношению к внутренней цилиндрической поверхности корпуса 1, так и по отношению к внешней цилиндрической поверхности постоянного магнита 10 и полюсного наконечника 11.
Предложенный датчик также содержит преобразователи 12 перемещения индуктивного типа, которые установлены на раме 2 и ориентированы вдоль оси маятника. Минимальное количество таких преобразователей 12 в предложенном датчике равно двум. Однако в вариантном выполнении изобретения может быть и иное количество преобразователей 12 перемещения, в частности - четыре преобразователя 12 перемещения. Преобразователи 12 установлены равноудаленно от оси маятника и смещены друг относительно друга на 90° по окружности с центром на оси стержня 3 маятника. Подвижные части 13 преобразователей 12 перемещения соединены с маятником посредством поперечных элементов 14 (рычагов), которые жестко соединены со стержнем 3 маятника, т.е. подвижные части 13 расположены в плоскости вершин канавок 9 и установлены на поперечных рычагах 14, прикрепленных к стержню 3 маятника. Таким образом подвижные части 13 жестко соединены со стержнем 3 маятника через рычаги 14, т.е. неподвижны относительно него. Преобразователи 12 перемещения могут быть установлены внутри корпуса так, что ось подвижной части 13 одного преобразователя 12 перемещения (или двух преобразователей 12 в вариантном выполнении) лежит в плоскости, проходящей через вершину одной канавки 9 и через ось стержня 3 маятника, а ось подвижной части 13 другого преобразователя 12 перемещения (или двух других преобразователей 12 в вариантном выполнении) лежит в плоскости, проходящей через вершину другой канавки 9 и через ось стержня 3 маятника. Однако, угловое расположение нижнего ножа 8 относительно преобразователей 12 в общем случае произвольное.
Согласно одному из вариантов выполнения предложенного изобретения (фиг. 1-3) шайба 5 шарнира имеет осевое отверстие 15, в котором расположен стержень 3 маятника. В данном случае кольцевой ограничитель 6 шарнира установлен по внутреннему периметру шайбы 5, т.е. в отверстии 15, охватывая часть стержня 3.
Количество преобразователей 12 перемещения согласно данному варианту равно двум. При этом каждый преобразователь 12 перемещения выполнен в виде двух дифференциально включенных катушек 16 индуктивности с сердечниками. Оси катушек 16 параллельны оси маятника, а обращенные друг к другу торцы катушек 16 расположены в плоскости вершин канавок 9, т.е. пары дифференциально включенных катушек 16 индуктивности своим центром расположены в этой плоскости. При этом подвижная часть 13 (сердечник) каждого преобразователя 12 выполнена в форме цилиндра, расположенного с зазором δ в полости внутри катушек 16. В данном случае подвижные части 13 установлены на поперечных элементах 14 (рычагах), расположенных под прямым углом относительно оси маятника и закрепленных на стержне 3 маятника. Пара поперечных элементов 14 снабжена противовесом 17.
Верхний нож 7 согласно данному варианту присоединен к стержню 3 посредством, например, винта 18 или заклепки или иного соединительного элемента, а нижний нож 8 жестко закреплен на раме 2.
Согласно другому варианту выполнения предложенного изобретения (фиг. 4-6) шайба 5 шарнира выполнена сплошной, т.е. не имеет осевое отверстие. В данном случае кольцевой ограничитель 6 шарнира установлен по наружному периметру шайбы 5, т.е. охватывает шайбу 5.
Количество преобразователей 12 перемещения согласно данному варианту равно четырем. При этом каждый преобразователь 12 перемещения выполнен в виде индуктивного датчика близости с переменным магнитным сопротивлением. Вторичные обмотки датчиков близости, расположенных диаметрально противоположно друг другу, включены дифференциально, а подвижные части 13 преобразователей 12 выполнены в виде пластин, которые установлены на блоке поперечных элементов 14 (рычагов), который присоединен к стержню 3 маятника и на котором установлен верхний нож 7 шарнира.
При использовании в качестве преобразователей 12 перемещения индуктивных датчиков близости с переменным магнитным сопротивлением их подвижные части 13 в форме пластин расположены в плоскости вершин канавок 8.
Поперечные элементы 14 (рычаги) изготовлены в виде единого блока, симметричного и уравновешенного относительно оси маятника. К блоку присоединен верхний нож 7. С целью обхода шарнира стержень 3 присоединен к блоку поперечных рычагов 14 дугой 19.
В предложенном изобретении (согласно обоим вариантам выполнения) маятник своим весом выбирает зазоры между вершинами канавок 9 и остриями ножей 7, 8. Внутри корпуса 1 на жестко прикрепленной к нему раме 2 установлены как нижний нож 8, так и преобразователи 12 перемещения. Расположение осей подвижных частей 13 преобразователей 12 в соответствующих плоскостях, проходящих через соответствующие вершины канавок 9, минимизирует их смещение в поперечном направлении при наклоне маятника.
Датчик наклона и вибрации содержит два измерительных канала перемещения и запитан от электронного блока 20, который может синхронно выдавать информацию о происходящем относительно медленном наклоне и о виброперемещении корпуса 1 датчика, закрепленного на объекте контроля.
Датчик наклона и вибрации разработан для диагностического контроля основного оборудования реакторной установки АЭС, которое характеризуется большой массой, малыми наклонами (до нескольких градусов), и спектром частот вибрации в диапазоне 1-70 Гц, с амплитудой до нескольких десятков микрометров.
Датчик наклона и вибрация работает следующим образом.
При вертикальной (без наклона, в исходном положении) ориентации корпуса 1 маятник расположен также вертикально под действием силы тяжести. При этом подвижные части 13 индуктивных преобразователей 12 перемещения установлены в среднем положении относительно катушек 16. Одновременно каналы электронного блока 20 отрегулированы на выдачу «нулевого» выходного сигнала.
Ножи 7, 8 опираются своими остриями на вершины канавок 9 шайбы 5 и позиционируют ось маятника относительно преобразователей 12 перемещения равноудаленно. Этому способствуют кольцевой ограничитель 6, который не позволяет ножам 7, 8 сместится вдоль направления канавок 9. Поперечное смещение ножей 7, 8 относительно вершин канавок 9 возможно на величину не более радиуса скругления вершин канавок 9 (не более 0,1 мм). Примерно на туже величину может сместится нож 7 или 8 вдоль своей канавки 9 из-за зазора между его боковыми сторонами и стенкой кольцевого ограничителя 6. Такое смещение в горизонтальном направлении не приводит к изменению «нулевого» выходного сигнала, поскольку зазор δ между подвижной частью 13 (сердечником, согласно первому варианту выполнения изобретения) и внутренней стенкой катушек 16 на порядок больше, а поперечный размер подвижной части 13 (пластины, согласно второму варианту выполнения изобретения) превышает поперечный размер катушки (вторичной обмотки датчика близости) на величину в несколько порядков смещения. Не приводит к изменению «нулевого»выходного сигнала и перекос сердечника 13 (фиг. 1) и пластины 13 (фиг. 4), происходящий при наклоне в плоскости, перпендикулярной той, в которой расположены рассматриваемые преобразователи 12 перемещения. Пренебрежимо мало также влияние поворота маятника вокруг своей оси из-за возможности смещения ножей 7, 8 относительно друг друга.
При наклоне в плоскости, проходящей через оси корпуса 1 и преобразователей 12 коэффициент преобразования канала измерения «датчик + электронный блок 20» имеет максимальную величину. Если наклон производится в произвольной плоскости, отстоящей от плоскости расположения преобразователей 12 перемещения на угол α, коэффициент преобразование канала составляет величину:
Кнα=Кн0⋅cosα,
где Кнα и Кн0 - коэффициенты преобразования для углов отклонения плоскости наклона α и 0, В/рад.
На фиг. 7 представлена зависимость погрешности определения наклона в произвольной плоскости, расположенной под углом α к плоскости расположения преобразователей 12 перемещения, полученная при проведении испытаний датчика наклона и вибрации.
Поскольку момент трения при повороте маятника определяется сопротивлением качению цилиндрического острия ножа с очень маленьким радиусом закругления (0,03-0,05 мм) по твердой поверхности канавки 9 шайбы 5 при небольшом контактном усилии, равном весу маятника, то разрешение датчика при измерении наклона составляет десятые доли угловой минуты. При этом вариация как составная часть основной приведенной погрешности не превышает ±0,1%. Систематическая составляющая (нелинейность) не превышает ±0,2% и определяется в основном нелинейностью индуктивных преобразователей перемещения. Дифференциальное включение катушек 16 индуктивности снижает нелинейность до приемлемой величины.
При намагничивании шайбы 5 под углом 45°±20° от направления канавок увеличивается прижимная сила ножей 7, 8 и, соответственно, вариация выходного сигнала, но при этом компенсируется нелинейность индуктивных преобразователей 12 перемещения как составная часть систематической погрешности датчика наклона. Это происходит вследствие появления момента сил в сторону дополнительного поворота маятника при удалении от «нулевого» положения.
При наклоне в произвольном направлении величина наклона определяется как суперпозиция наклонов по основным направлениям по формуле:

где β, β1, β2 - угол наклона в произвольном направлении и измеренные углы наклона по основным направлениям (в плоскостях расположения преобразователей 12 перемещения), рад.
Демпфирующее устройство на основе постоянного магнита 10 (фиг. 1) при измерении наклона служит для гашения колебаний маятника с частотой основного резонанса, вызванных случайным воздействием. При отсутствии перемещения демпфирующее устройство на маятник не воздействует.
При контроле виброперемещений датчик наклона и вибрации работает следующим образом.
Горизонтальное виброперемещение корпуса 1 датчика с частотой больше частоты основного резонанса колебаний маятника приводит к запаздыванию центра массы маятника относительно корпуса 1. При этом маятник поворачивается внутри корпуса 1 на максимальный угол:
где А - амплитуда виброперемещения корпуса 1, м;
l0 - приведенная длина физического маятника, м.
Приведенная длина физического маятника равна:

где j - момент инерции маятника относительно оси подвеса, кг⋅м2;
m - масса маятника, кг;
а - расстояние от центра массы до оси подвеса, м.
При этом частота основного резонанса физического маятника равна:

где g - ускорение свободного падения, м/с2.
Если величина наклона равна:

а поворот маятника при виброперемещении с амплитудой А равен:

то приравнивая правые части выражений (2) и (3), получим:
После преобразования имеем:

где U - амплитуда выходного сигнала, В;
Кн0 и Кв0 - коэффициенты преобразования наклона, В/рад, и виброперемещения, В/м, при наклоне и виброперемещении в плоскости расположения преобразователей перемещения.
При малых углах наклона выражение (4) приближается к равенству:

Таким образом, определение коэффициента преобразования наклона позволяет достаточно точно определить коэффициент преобразования виброперемещения, чем можно воспользоваться при проведении поверки датчика как средства измерения наклона.
Частота основного резонанса (ƒ0) зависит от длины физического маятника, но значительно снизить ее не представляется возможным из-за увеличения габаритов датчика. Снижение частоты основного резонанса позволяет расширить частотный диапазон контроля виброперемещения в область низких частот.
На фиг. 8 представлена амплитудно-частотная характеристика (АЧХ) датчика наклона и вибрации при оптимальном демпфировании, полученная на испытаниях при виброперемещении ±10 мкм. Коэффициент преобразования (Кв0) стабилен при частоте вибрации выше ƒ0. При частоте ниже ƒ0 он снижается с темпом ~11 дБ на октаву, но величина снижения не мешает контролировать вибрацию до частоты ~0,5ƒ0.
При контроле виброперемещения демпфирующее устройство играет важную роль, стабилизируя АЧХ без заужения частотного диапазона.
Демпфирующее устройство (фиг. 1) работает следующим образом.
По периметру полюсного наконечника 11 постоянного магнита 10 образуется магнитное поле, вектор индукции которого направлен радиально веером. При движении груза 4, изготовленного из электропроводного материала в форме перевернутого стакана, на свободные заряды (электроны) действует сила Лоренца, направленная перпендикулярно векторам индукции и скорости движения груза 4. Вследствие этого в контуре, образованном стенками груза 4, индуцируются электрический ток, который в свою очередь генерирует силу Ампера, действующую на груз 4 в направлении, противоположном движению. Сила Ампера пропорциональна силе тока и индукции.
Изменение направления перемещения груза 4 маятника изменяет положение контура тока и направление силы Ампера, но вследствие осевой симметрии груза 4 сила Ампера всегда направлена против перемещения и величина ее пропорциональна скорости перемещения, квадрату индукции магнитного поля в зазоре между корпусом 1 и полюсным наконечником 11 и электропроводности материала груза 4.
Выполнение груза 4 в форме перевернутого стакана позволяет увеличить его момент инерции относительно точки подвеса без увеличения массы и, тем самым, увеличить длину физического маятника (l0), снизив частоту основного резонанса (ƒ0).
При горизонтальном виброперемещении ножи 7, 8 контактируют с вершинами канавок 9 без проскальзывания, поскольку удерживаются на поверхности силой трения покоя, пропорциональной весу маятника и коэффициенту трения, а сила сдвига шайбы 5 относительно нижнего ножа 8 пропорциональна суммарной массе шайбы 5, рычагов 14 и подвижных частей 13, а также ускорению виброперемещения. Так как суммарная масса этих узлов на порядок меньше массы маятника, то сила трения покоя всегда обеспечивает неподвижность ножей 7, 8 относительно шайбы 5 при ограничении величины виброускорения.
Если к весу маятника добавляется сила притяжения ножей 7, 8 к намагниченной шайбе 5, допускаемая величина виброускорения может быть повышена.
Противовес 17 (фиг. 2) нужен для того, чтобы центр тяжести маятника находился на его оси. Это необходимо для снижения влияния вертикальной вибрации на результаты контроля горизонтальный вибрации. Во втором варианте исполнения изобретения (фиг. 4, 5, 6) в противовесе нет нужды.
Изготовление поперечных рычагов 14 в виде единого блока увеличивает жесткость и снижает массу конструкций, что повышает допускаемую величину виброускорения (фиг. 4, 5, 6).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1980 |
|
SU901818A2 |
| Датчик угла наклона подвижного объекта | 1989 |
|
SU1737272A1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2018155C1 |
| Устройство для определения угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1981 |
|
SU1024720A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Маятниковый наклономер | 1974 |
|
SU509772A1 |


Изобретение может быть использовано в энергетике, строительстве и других отраслях, где необходимо контролировать наклон и вибрацию при малых величинах параметров и малых частотах виброперемещения. Датчик наклона и вибрации содержит корпус и расположенные внутри него маятник в виде стержня с грузом на конце, подвешенный внутри корпуса другим концом посредством шарнира с двумя угловыми степенями свободы, также демпфирующее устройство и преобразователи перемещения. Подвижные части преобразователей перемещения соединены с маятником, шарнир составлен из шайбы, имеющей на каждом торце по одной выполненной диаметрально и перпендикулярно противоположной канавке треугольного сечения, кольцевого ограничителя, установленного по периметру шайбы, и установленных в канавках ножей, верхний из которых присоединен к стержню маятника, а нижний - к раме, закрепленной на корпусе. Преобразователи перемещения - индуктивного типа, установлены на раме и ориентированы вдоль оси маятника, а их подвижные части расположены в плоскости вершин канавок и установлены на поперечных рычагах, прикрепленных к стержню маятника. Техническим результатом является повышение разрешения при контроле малых величин наклона и виброперемещения с малым ускорением (10-5-10-4 м/с2) в произвольном горизонтальном направлении. 6 з.п. ф-лы, 8 ил.
1. Датчик наклона и вибрации, содержащий корпус и расположенные внутри него маятник в виде стержня с грузом на конце, подвешенный внутри корпуса другим концом посредством шарнира с двумя угловыми степенями свободы, а также демпфирующее устройство и по меньшей мере два преобразователя перемещения, установленные равноудаленно от оси маятника и смещенные друг относительно друга на 90° по окружности с центром на оси стержня маятника, при этом подвижные части преобразователей перемещения соединены с маятником, отличающийся тем, что шарнир составлен из шайбы, имеющей на каждом торце по одной выполненной диаметрально и перпендикулярно противоположной канавке треугольного сечения, вершины которых расположены в одной плоскости, кольцевого ограничителя, установленного по периметру шайбы, и установленных в канавках ножей, верхний из которых присоединен к стержню маятника, а нижний - к раме, закрепленной на корпусе, причем преобразователи перемещения - индуктивного типа, установлены на раме и ориентированы вдоль оси маятника, а их подвижные части расположены в плоскости вершин канавок и установлены на поперечных рычагах, прикрепленных к стержню маятника.
2. Датчик по п. 1, отличающийся тем, что шайба шарнира выполнена из магнитотвердого материала, намагничена в направлении 45±20° от вершин канавок, ножи выполнены из магнитного материала, а кольцевой ограничитель - из немагнитного.
3. Датчик по п. 1, отличающийся тем, что кольцевой ограничитель шарнира установлен по наружному периметру шайбы.
4. Датчик по п. 1, отличающийся тем, что шайба снабжена осевым отверстием, а кольцевой ограничитель шарнира установлен по внутреннему периметру шайбы.
5. Датчик по п. 1, отличающийся тем, что каждый преобразователь перемещения выполнен в виде двух дифференциально включенных катушек индуктивности, оси которых параллельны оси маятника, обращенные друг к другу торцы расположены в плоскости вершин канавок, а подвижная часть выполнена в форме цилиндра, расположенного с зазором в полости внутри катушек.
6. Датчик по п. 1, отличающийся тем, что он содержит четыре преобразователя перемещения, каждый из которых выполнен в виде индуктивного датчика близости с переменным магнитным сопротивлением, причем вторичные обмотки датчиков близости, расположенных диаметрально, включены дифференциально, а подвижные части выполнены в виде пластин.
7. Датчик по п. 6, отличающийся тем, что один из ножей шарнира присоединен к стержню маятника посредством блока поперечных рычагов.
| Прибор для вязки проводов на изоляторах | 1926 |
|
SU15603A1 |
| Устройство для определения углов наклона | 1983 |
|
SU1174749A1 |
| US 6826844 B2, 07.12.2004 | |||
| US 4667413 A1, 26.05.1987 | |||
| US 4027399 A1, 07.06.1977. | |||

