Фиг. 1
Изобретение относится к области неразрушающего контроля качества и может быть использовано в приборах для контроля свойств поверхностных слоев ферромагнитных материалов и изделий.
Цель изобретения - повышение достоверности контроляза счет компен- сации влияния воздушного зазора между
. контролируемым изделием и индукцион- ным преобразователем.
На фиг. 1 показана блок-схема уст, ройства; на фиг. 2 - графики, поясня ющие принцип его действия; на фиг. 3 конструкция индукционного преобразова;теля.
|. Устройство для контроля ферромаг- :нитных изделий содержит источник 1 I переменного тока, индукционный преоб- разователь 2, усилитель 3, двухка- нальный усилитель 4, детектор 5, двух канальный детектор 6, индикато;р 7 и блок 8 формирования управляющего сигнала. На фиг. 1 обозначены также W, W, Wj - намагничивающая, измерительная и дополнительная измерительная обмотки индукционного преобразователя 2 соответственно. Источник 1 переменного тока, индукционный преобразователь 2, усилитель 3, детектор 5, индикатор 7 соединены последовательно,- Первый вход двухканального.усилителя 4 соединен с измерительной обмоткой W индукционного преобразователя 2, к второму входу подключена дополнительная измерительная обмотка W, а входы двухканального детектора 6 соединены с выходами двухканального усилителя 4 Входы блока 8 формирования управляю- щего сигнала соединены с вькодами двухканального детектора 6, а выход блока 8 соединен с управляющим входом усилителя 3.
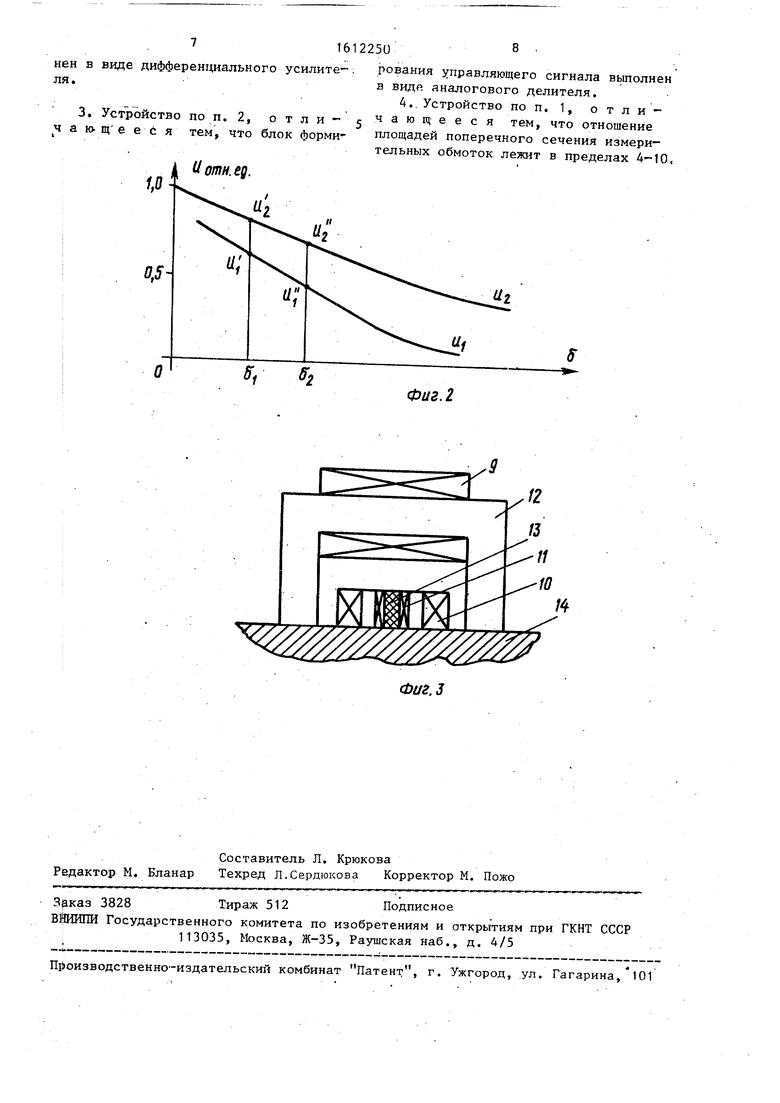
Индукционный преобразователь (фиг. 3) содержит намагничивающую 9, измерительную 10 и дополнительную 11 измерительную обмотки (соответственно W,, Wj и Wj, фиг. 1), магнито- провод 12 и ферритовый сердечник 13,. покещенный внутрь обмотки 11, кроме иТого, показан контролируемый участок Т4 изделия.
Устройство работает следующим образом.
Ток от источника 1 (фиг. 1), протекая по обмотке W индукционного преобразователя 2, создает переменный
0
5
0
5
5
05
0
5
магнитньм поток, замыкающийся через контролируемый участок изделия. Вслед-- ствие перемагничивааия последнего в измерительной обмотке Wj индукционного преобразователя 2 индуцируется ЭДС скачков Баркгаузена, которая усиливается усилителем 3, детектируется детектором 5 и далее поступает на индикатор 7. По показаниям индикатора делают выводы о качестве контролируемого изделия. При наличии зазора между индукционным преобразователем и контролируемым изделием величина ЭДС с обмотки W уменьшае.тся за счет умень-- шения потокосцепления витков обмотки Wj с полями рассеяния скачков Баркгаузена.
Компенсация влияния зазора между ИНДУК1Ц10ННЫМ преобразователем и изделием состоит в следующем. Индукционный преобразователь 2 (фиг. 1) снабжен дополнительной измерительной обмоткой Wj. Выходные сигналы с обмоток Wg и Wj поступают на двухканальньй усилитель 4, далее на входы двухканального детектора 6, выходные сигналы которого постуЬают в блок В формирования управляющего сигнала. Выходной сигнал блока 8 поступает на управляющий вход усилителя 3, изменяя соответствующим образом коэффициент усиления последнего.
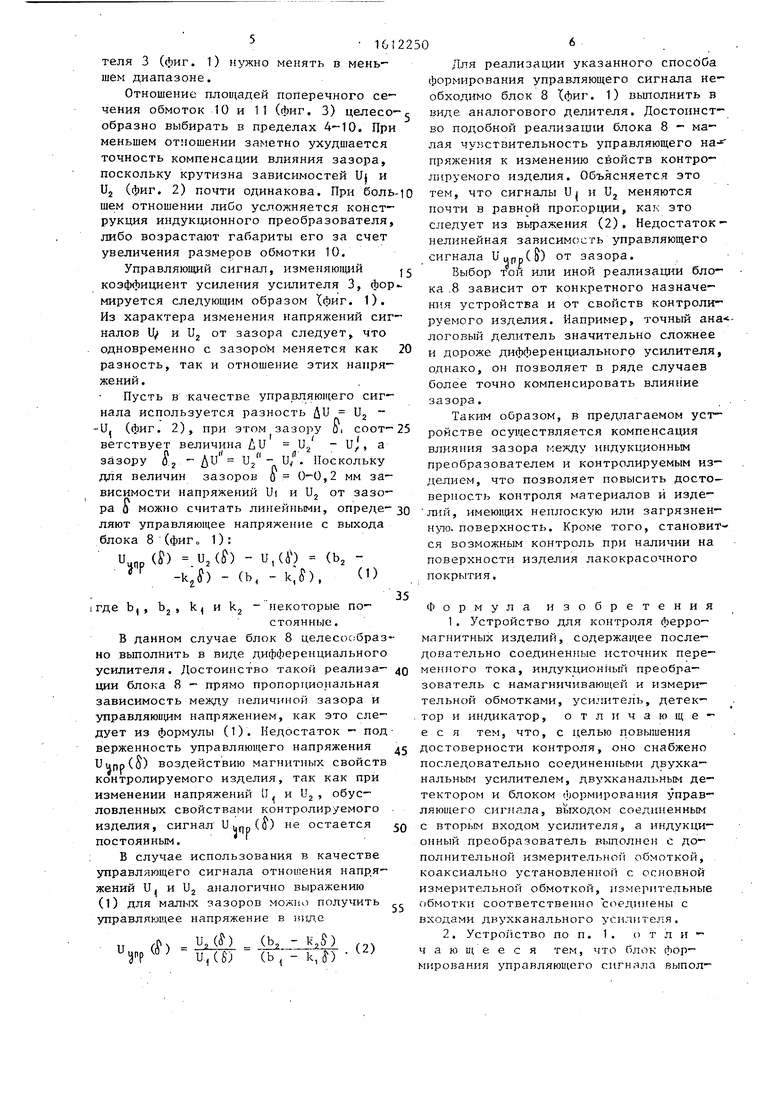
Сигналы, снимаемые с обмоток Wj и Wj , имеют практически одинаковые характеристики, однако величины этих сигналов различным образом зависят от зазора. На фиг. 2 показаны зависит- мости напряжения сигналов с указанных обмоток от зазора (И -. для обмотки УЗ, U2 - для обмотки Wj). Из фиг. 2 видно, что крутизна зависимостей раз лична. Это достигается за счет соот- ветс;твующего выбора конструктивных параметров обмоток W и Wj. Наиболее критичным параметром является площадь поперечного сечения обмоток.
Обмотки 10 и 11 расположены коак- сиально, и ферритовьш сердечник 13 . дополнительно увеличивает крутизну зависимости сигнала с обмотки 11 от зазора. Непринципиально, какую из обмоток 10 и 11 использовать в качестве дополнительной. Однако целесообразно использовать обмотку 11, так как при этом диа пазон изменения величины сигнала от зазора для основной измерительной обмотки 10 меньше, поэтому и коэффициент усиления усили-
1&12250
теля 3 (фиг. 1) нужно менять в меньшем диапазоне.
Отношение площадей поперечного сечения обмоток 10 и 11 (фиг. 3) целесо-,- образно выбирать в пределах 4-10. При меньшем отношении заметно ухудшается точность компенсации влияния зазора, поскольку крутизна зависимостей U) и Uj (фиг. 2) почти одинакова. При боль-1о тем отношении либо усложняется конструкция индукционного преобразователя, либо возрастают габариты его за счет увеличения размеров обмотки 10.
Управляющий сигнал, изменяю1ций j коэффициент усиления ус1-шителя 3, фор, мируется следующим образом Хфиг. 1). Из характера изменения напряжений сигналов Uy и и от зазора следует, что одновременно с зазором меняется как 20 разность, так и отношение этих напряений.
Пусть в качестве управляющего сигнала используется разность UU Uj л
и (фиг. 2), при этом зазору Oi соот-25 ветствует величина Ди - U/ а зазору ,2 - Ди Uj - Uv . Поскольку ля величин зазоров i 0-0,2 мм заисимости напряжений Ui и V от зазоа 5 можно считать линейными, опреде- зо яют управляющее напряжение с выхода лока 8 (фиг о 1):
и,.„„ () и, (ff) - и, (Л (ь, -kj) - (b, - k,. (1)
fp
Л
где b
г
Ц -
некоторые постоянные.
В данном случае блок 8 целесос браз- но выполнить в виде дифференциального
,- 1о
j , 20
Для реализации указанного способа формирования управляющего сигнала необходимо блок 8 Хфиг. 1) выполнить в виде аналогового делителя. Достоинство подобной реализащш блока 8 - малая чувствительность управляющего на- пряжения к изменению свойств контролируемого изделия. Объясняется это тем, что сигналы Uj и Uj меняются почти в равной пропорции, как это следует из выражения (2). Недостаток- нелинейная зависимость управляющего от зазора.
25 зо
5
сигнала U ипр &)
Выбор тон или иной реализации блока .8 зависит от конкретного назначения устройства и от свойств контролируемого изделия. Например, точный логовый делитель значительно сложнее и дороже дифференциального усилителя, однако, он позволяет в ряде случаев более точно компенсировать влия11ие зазора.. .
Таким образом, в предлагаемом устройстве осуществляется компенсация влияния зазора между индукционным преобразователем и контролируемым изделием, что позволяет повысить достоверность контроля материалов и изде- Л11Й, имеюш х неплоскую или загрязнен- . поверхность. Кроме того, становится возможным контроль при наличии на поверхности изделия лакокрасочного покрытия.
Формула изобретения 1. Устройство для контроля ферромагнитных изделий, содержащее последовательно соединенные источник пере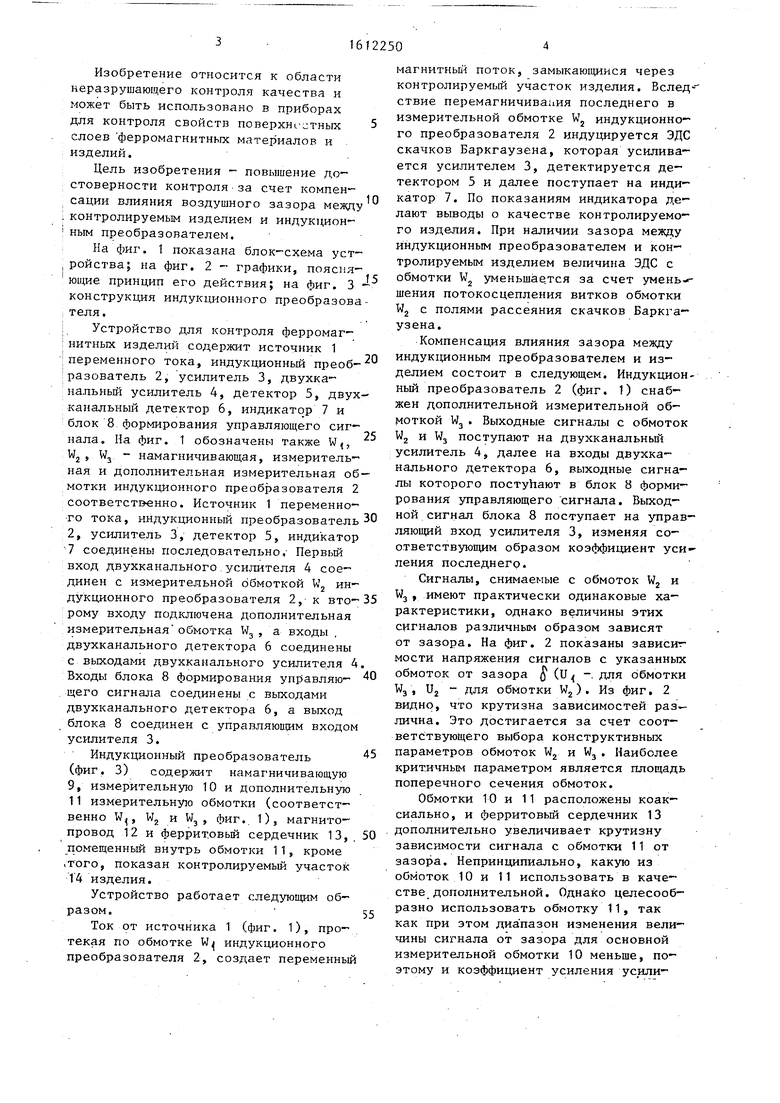
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля качества поверхностного упрочнения | 1987 |
|
SU1429006A1 |
| Феррозондовый дефектоскоп | 1977 |
|
SU739387A1 |
| Устройство для контроля магнитных свойств изделий | 1990 |
|
SU1749858A1 |
| УСТРОЙСТВО ЭКСПРЕСС-КОНТРОЛЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ЛИСТОВОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2014 |
|
RU2551639C1 |
| Устройство для неразрушающего контроля ферромагнитных изделий | 1985 |
|
SU1241122A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛИЧЕСКИХ АРМИРУЮЩИХ ЭЛЕМЕНТОВ В РЕЗИНОТРОСОВЫХ ЛЕНТАХ | 2023 |
|
RU2816247C1 |
| УСТРОЙСТВО ДВУХПАРАМЕТРОВОГО КОНТРОЛЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ПОКРЫТИЙ | 2013 |
|
RU2533756C1 |
| Вихретоковое устройство для неразрушающего контроля | 1979 |
|
SU930104A2 |
| Устройство для контроля физико-механических свойств ферромагнитных изделий | 1984 |
|
SU1165971A1 |
| Магнитотелевизионный дефектоскоп | 1991 |
|
SU1779991A1 |
Изобретение относится к неразрушающему контролю и может быть использовано для контроля поверхностных слоев ферромагнитных изделий. Цель изобретения - повышение достоверности контроля за счет компенсации влияния воздушного зазора между контролируемым изделием и индукционным преобразователем. Ток от источника 1 переменного тока, протекая по намагничивающей обмотке индукционного преобразователя 2, создает переменный магнитный поток, замыкающийся через контролируемый участок изделия. Вследствие перемагничивания последнего в измерительной обмотке 10 индукционного преобразователя 2 индуцируется ЭДС скачков Баркгаузена, которая усиливается усилителем 3, детектируется детектором 5 и поступает на индикатор 7, по показаниям которого делают выводы о качестве контролируемого изделия. Выходные сигналы с измерительных обмоток 10 и 11 поступают на двухканальный усилитель 4, далее на двухканальный детектор 6, выходные сигналы которого поступают в блок 8 формирования управляющего сигнала, формирующего управляемый сигнал, изменяющий коэффициент усиления усилителя 3. 3 з.п. ф-лы, 3 ил.
усилителя. Достоинство такой реализа- до менного тока, индукционный преобра- ции блока 8 - прямо пропорциональная зависимость между пеличиной зазора и управляюищм напряжением, как это следует из формулы (1). Недостаток - под верженность управляющего напряжения дд Uunp(J) воздействию магнитных свойств контролируемого изделия, так как при изменении напряжений 11 и Uj , обусловленных свойствами контролируемого
изделия, сигнал (а) не остается постоянным.
В случае использования в качестве управляющего сигнала отношения напряжений и, и и, аналогич о выражению
50
зователь с намагничивающей и измерительной обмотками, усилитель, детектор и индикатор, отличающе еся тем, что, с целью повышения достоверности контроля, оно снабжено последовательно соединенными двухка- нальньгм усилителем, двухканальным де тектором и блоком формирования управ ляющего сигнала, выходом соединенньгм с вторым входом усилителя, а индукци онный преобразователь выполнен с дополнительной измерительной обмоткой, коаксиально установленной с основной измерительной обмоткой, измерительны
(1) для малых зазоров можн.1 получить обмотки соответственно с(1едияены с управляющее напряжение в яде
тт ( и. () (А JLJ Пи,, (g) (Ь;- k)
(2)
входами двухканального усилителя.
менного тока, индукционный преобра-
зователь с намагничивающей и измерительной обмотками, усилитель, детектор и индикатор, отличающееся тем, что, с целью повышения достоверности контроля, оно снабжено последовательно соединенными двухка- нальньгм усилителем, двухканальным детектором и блоком формирования управляющего сигнала, выходом соединенньгм с вторым входом усилителя, а индукционный преобразователь выполнен с дополнительной измерительной обмоткой, коаксиально установленной с основной измерительной обмоткой, измерительные
обмотки соответственно с(1едияены с
входами двухканального усилителя.
нен в ввде дифференциального усилите- пования управляющего сигнала вьшолнен
в виде аналогового делителя. т V - Устройство по п. 1. о т л и . а- -тгг -:-4; .:j - 31-/„-J.7J--:-:.
тельных обмоток лежит в пределах 4-10.
1,Q
отн.ед.
1 2
Фиг. 2
12
Фи.З
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Паспорт и техническое описание | |||
| Ижевск: Ижевский механический институт, 1986. | |||
