{Г.
с


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1636982A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1612372A1 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1784944A1 |
| Устройство для управления шаговым двигателем | 1990 |
|
SU1777229A1 |
| Способ отключения шагового двигателя при механической перегрузке | 1989 |
|
SU1617609A1 |
| Статический возбудитель электрических машин | 1991 |
|
SU1786618A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1646036A2 |
| Устройство для управления волновым шаговым двигателем | 1989 |
|
SU1700739A1 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2088034C1 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M-ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092965C1 |

Изобретение относится к электротехнике, а именно к устройствам управления шаговыми двигателями, и может быть использовано в малогабаритном приводе с шаговыми двигателями. Целью изобретения является снижение габаритов и массы привода. Контроль за механической перегрузкой осуществляется с помощью анализа изменения частоты управляющих сигналов с выхода стабилизаторов тока. Благодаря этому отпадает необходимость установки электромеханического датчика на оси шагового двигателя. Дополнительные преимущества - большее быстродействие, возможность контроля работоспособности усилителя мощности и отработки каждого управляющего импульса. Устройство позволяет разместить собственно элементы контроля не в самом приводе, а в контрольной аппаратуре. 4 ил.
Изобретение относится к управлению электрическими машинами и может быть использовано в дискретном электроприводе, преимуш,ественно с малогабаритными двигателями.
Цель изобретения - уменьшение массы и габаритов привода.
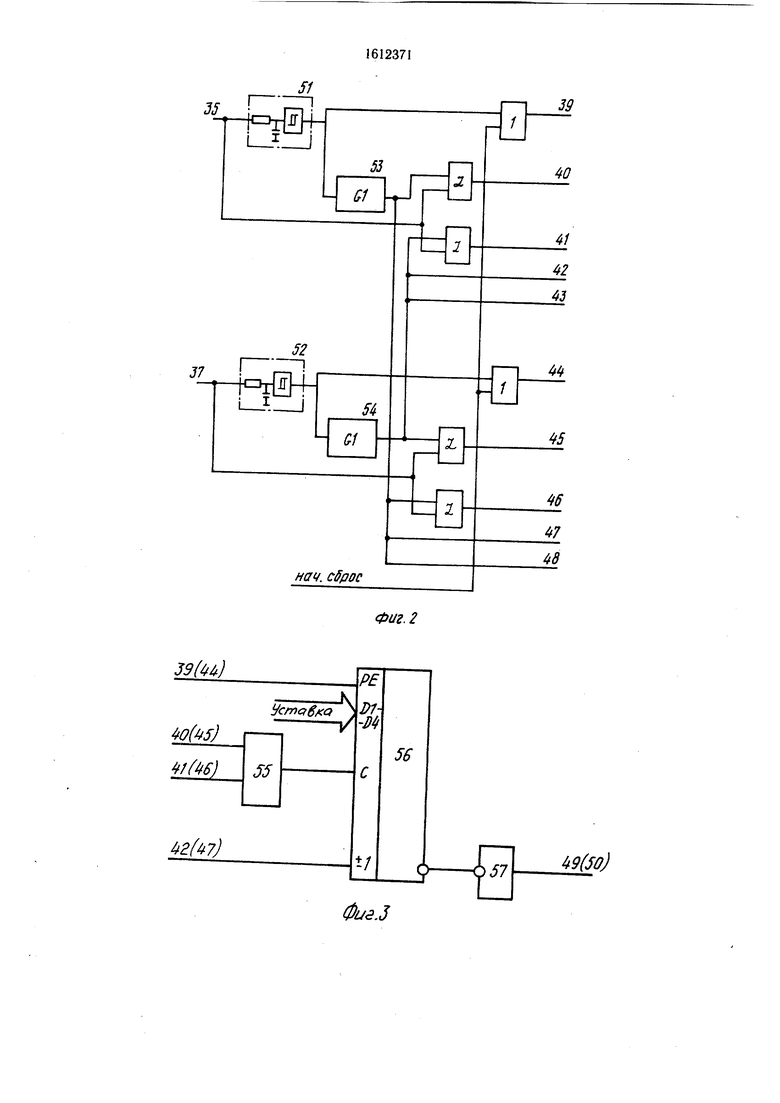
На фиг. 1 приведена схема привода, включающая устройство для контроля; на фиг. 2 - пример выполнения формирователя импульсов; на фиг. 3 - пример выполнения блока сравнения; на фиг. 4 - циклограмма работы устройства.
Привод содержит первую I, вторую 2, третью 3, четвертую 4 фазные обмотки шагового двигателя, первый 5, второй 6, третий 7, четвертый 8 фазные ключи, первый 9, второй 10 регулируюш,ие ключи, первый 11, второй 12 регуляторы тока, первый 13, второй 14 резисторы обратной связи по току, первый 15, второй 16 диоды контура регулирования, распределитеаь 17 импульсов, первый 18, второй 19, третий 20, четвертый 21
форсировочные диоды, форсировочный резистор 22, форсировочный конденсатор 23, формирователь 24 импульсов, первый 25, второй 26 блоки сравнения, первый 27, второй 28 элементы И, элемент ИЛИ 29.
Входом привода является вход 30 распре- делитатя 17 импульсов, выходы 31-34, распределителя импульсов соединены с входами первого 5, тоетьего 7, второго 6, четвертого 8 фазных ключей, выход 35 регулятора 11 тока соединен с входом регу.-чярующего ключа 9 и первым входом формирователя 24 импульсов, выход 36 первого 9 регулирующего ключа соединен с фазными обмотками и 2 и диодом 15, выход 37 регулятора 12 тока соединен с входом регулирующего ключа 10 и вторым входом формирователя 24 импульсов, выход 38 второго 10 регулирующего ключа соединен с фазными обмотками 3 и 4 и диодом 16. Формирователь 24 имеет выходы 39-48.
Первый 39. шестой 44 выходы формирователя 24 импульсов соединены с входами сок
о
ответственно первого 25 и второго 26 блоков сравнения, предназначенными для начальной установки, второй 40, седьмой 45 выходы формирователя 24 импульсов соединены с входами, соответственно первого 25 и второго 26 блоков сравнения, предназначенными для приема первой серии импульсов (при вычитании), а третий 41, восьмой 46 - для второй серии импульсов (при сложении), четвертый 42, девятый 47 выходы формирователя 24 импульсов соединены с входами соответственно первого 25 и второго 26 блоков сравнения, предназначенными для переключения направления счета, пятый 43, десятый 48 выходы формирователя 24 импульсов соединены с вторыми входами соответственно первого 27 и второго 28 элементов И, выход 49 первого 27 элемента И, выход 50 второго 28 элемента И соединены с входами элемента ИЛИ 29.
Устройство работает следующим образом.
При поступлении на вход 30 распределителя 17 импульсов сигналов, распределитель 17 импульсов вырабатывает последовательность импульсов на первом 31, втором 32, третьем 33, четвертом 34 выходах, поступающую на входы первого 5, третьего 7, второго 6, четвертого 8 фазных ключей, подключающих к источнику питания соответственно первую 1, третью 3, вторую 2, четвертую 4 фазные обмотки.
Первый резистор 13 обратной связи по току, первый 5 или второй 6 фазные ключи с соответствующими первой 1 и второй 2 фазами шагового двигателя, первый 9 регулирующий ключ, первый регулятор 11 тока, первый диод 15 контура регулирования тока, действук щие по принципу «токовой коридор образуют контур регулирования тока.
Аналогичный контур регулирования тока образуют элементы: второй резистор 14, третий 7 и четвертый 8 фазные ключи, третья 3 и четвертая 4 фазы шагового двигателя, второй 10 регулирующий ключ, второй регулятор 12 тока, второй 16 диод контура регулирования, первый 18, второй 19, третий 20, четвертый 21 форсировочные диоды, фор- сировочный резистор 22, форсировочный конденсатор 23 образуют цепь форсировки в соответствующей обмотке при ее отключении.
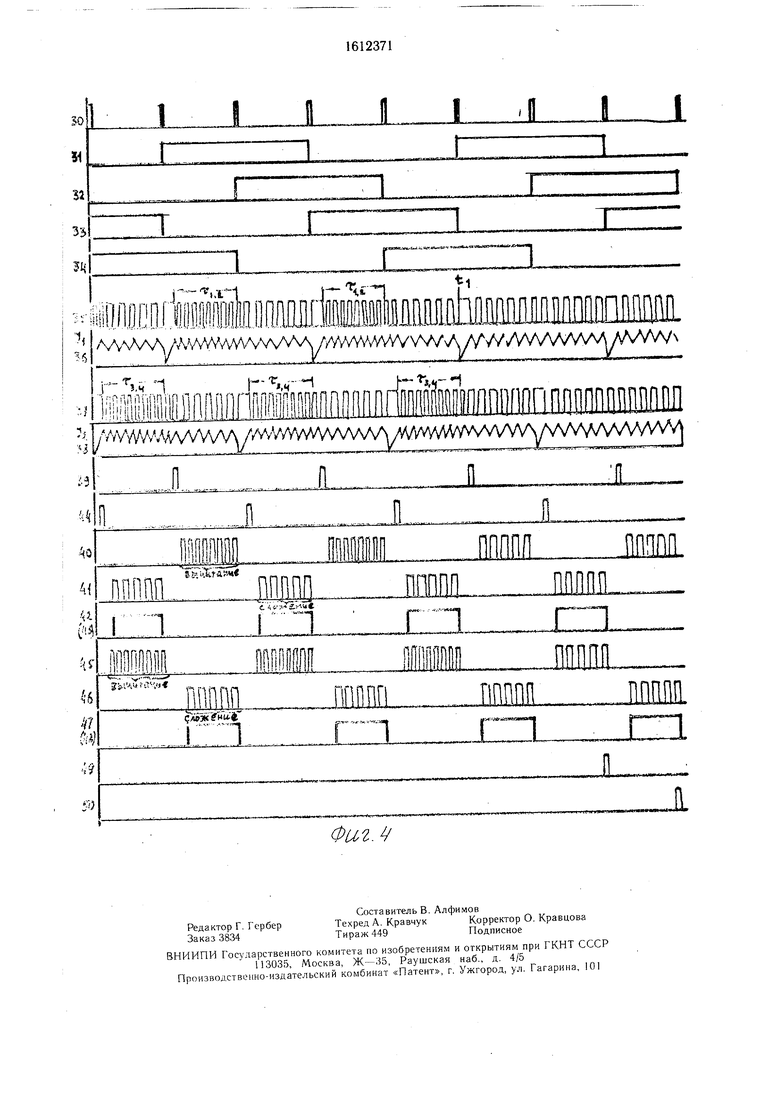
При вращении ротора шагового двигателя во время поворота происходит периодическое изменение электромагнитных свойств системы ротор - статор и соответственное изменение электромагнитных свойств подключенной обмотки, что выражается в изменении частоты регулирования тока в данной обмотке. Конкретно это явление выражается в том, что в момент поворота во вновь подключенной обмотке существенно увеличивается частота регулирования тока ( 50%).
На циклограмме (фиг. 4) отмечены временные интервалы существенного повышения частоты, как Т|,2 для первой 1 и второй 2 и как тз,4 для третьей 3 и четвертой 4 обмоток шагового двигателя.
Следует отметить, что поворот сказывается и на частоте регулирования тока некоммутируемой обмотки, но значительно меньше и в течение меньшего временного интервала (это изменение на диаграмме
0 (фиг. 4) условно не показано). Диаграмма, показанная на фиг. 4 (35-38) характерна для работы шагового двигателя на частоте приемистости.
При механическом торможении шагового двигателя при поступлении управляющих
импульсов 31-34 (фиг. 4) на фазные ключи 5-8 не происходит поворота оси шагового двигателя в пределах периода управления какой-либо фазы, частота регулирования тока в обмотках поддерживается по0 стоянной в пределах этого периода и может отличаться на величину случайных отклонений частоты регулирования регулятора тока. На диаграмме (фиг. 4) это показано условно в момент времени ti. Сравнивая частоту регулирования (или количество импуль5 сов за один и тот же временной интервал) тока в фазе в течение интервала времени, соответствующего ожидаемому повороту и в течение интервала времени после окончания ожидаемого поворота, можно установить факт механического торможения. В этом случае при поступлении на входы формирователя 24 импульсов сигналов с выходов 35 и 37, первого 11 и второго 12 регуляторов тока он вырабатывает последовательности импульсов на своих выходах 39-48 согласно фиг. 4.
На первом 39 и шестом 44 выходах формируются импульсы, устанавливающие соответствующие блоки 25 и 26 сравнения в исходное состояние перед началом контроля, на втором 40 и третьей 41 выходах фор0 мируются импульсы, частота которых (или количество за одинаковый временной интервал) сравнивается (эти интервалы относятся к двум половинам периода подключения первой или второй обмоток).
Указанные импульсы поступают на вхо5 ды первого 27 устройства сравнения.
На четвертом 42 выходе формируется сигнал в виде импульса, определяющего направление счета (в данном случае наличие импул1ьса - сложение, отсутствие - вычитание) и относящийся к интервалу, во время которого выявляется факт механического торможения.
На пятом 43 выходе формируется сигнал разрешения на пропуск через первый элемент И 27 сигнала о механической переg грузке на выход через элемент ИЛИ 29. Сигналы на шестом 44, седьмом 45, восьмом 46, девятом 47 и десятом 48 выходах формирователя 24 импульсов аналогичны
0
5
0
сигналам на первом 39, втором 40. третьем 41, четвертом 42 и пятом 43 выходах. Формирователь 24 импульсов включает в себя фильтры 50 и 51, предназначенные для выделения импульса установки в начальное положение блоков 25 и 26 сравкения и представляющие из себя, например, RC-цепь и триггер, Шмитта. Эти фильтры задерживают короткие импульсы и пропускают длинный импульс.
этот сигнал можно использовать для отключения питания шагового двигателя, можко использовать только для регистрации при кратковременной перегрузке.
Устройство обладает также дополнитель- 5 ными преимуществами: если при Э1ссплуата- ции механическая нагрузка стабильна, а контроль механической перегрузки н.еобхо- дим тшько при изготовлении и испытании привода, то собственно контрольное устБлоки 25 и 26 сравнения сравнивают ко- ю ройство может быть установлено отаег/ьно личества импульсов, поступающие с второ-в контрольной аппаратуре, что дает удобство
го 40 и третьего 41 выходов формирова-в эксплуатации по сравнению с известнымтеля 24 импульсов для первого блока 25 и сповышается быстродействие так как сигседьмого 45 и восьмого 46 выходов для ВТО-нал о перегрузке выдается после максирого блока 2Ь.мум двух управляющих на входе 30 имСравнение производится с точностью до пульсов, а в известном - nocie 3- устрой- величины случайных отклонений., СТЕО позволяет дополнительно контролироЬлоки сравнения могут быть реализова-вать отработку аждого шага по импульсны, например, как показано на фиг. 3 в виде - -трех логических элементов: ИЛИ 55, реверсивного счетчика 56 и элемента НЕ 57.
После записи импульсом начальной установки 39 (44) начальной уставки, равной двойной величине случайного отклонения числа импульсов, счетчик работает на вычитание, а после переключения направления счета - на сложение.
Таким образом, если вторая пачка импульсов, приходящая во время работы на сложение, равна по количеству импульсов
ным сигналам с выходов блоков 25 и 26 сравнения во время работы этих устройств
20 на вычитание; сигналы, идущие с выходов первого 39 и щестого 44 формирователя импульсов могут характеризовать исправность работы усилителя мощности, так как постоянный «О или «1 будут характеризовать отказ устройства управления; уже
25 существующие приводы легко оснастить средством контроля механической перегрузки без переделки собствен1 ого привода.
пачке импульсов, приходящих во время работы на вычитание, то на выходе 49 (50) сформируется сигнал переполнения счетчика, что говорит о механической перегрузке оси шагового двигателя.
30
Формула изобретения
Устройство для контроля механической перегрузки шагового двигателя, работающего .4 режиме парной коммутации с импульсной стабилизацией тока фаз, содержащее первый блок сравнения, элемент И, элемент ИЛИ, отличающееся тем, что, с целью
Устройство для контроля механической перегрузки шагового двигателя, работающего .4 режиме парной коммутации с импульсной стабилизацией тока фаз, содержащее первый блок сравнения, элемент И, элемент ИЛИ, отличающееся тем, что, с целью
Устройство позволяет анализировать соотношение количества импульсов на каждом,
периоде управления каждой фазой при лю- 35 уменьшения массы Й7а бар итов введе ньГв то бом типе перегрузки. Таким образом, уст-рой блок сравнения, второй элемент И и формирователь импульсов, входы которого пред- наз};ачены для соединения с выходами имройство позволяет контролировать 5ехани- ческую перегрузку на оси шагового двигателя, используя только сигналы управления
. .пульсных стабилизаторов тока фаз усгс выходов регуляторов тока, что позволяет до ройства для управления двигателем, а выхо- отказаться от игпольчоиянмо an i/Tr rk ravnп,. .,,..л „.
отказаться от использования электромеханического датчика из диска и оптопар, т. е. достигается цель изобретения - уменьшение габаритов и массы щагового привода. Следует отметить, что полученный сигнал. о механической перегрузке можно использовать для отключения входных сигналов, как и в известном устройстве. Кроме того.
ды исходного положения, импульсные и направления счета соединены с соответствующими входами блоков сравнения, выходы разрешения соединены с первыми входами элементов И, вторые входы которых соеди- 45 нены с выходами соответствующих блоков сравнения, а выходы - с входами элемента ИЛИ.
этот сигнал можно использовать для отключения питания шагового двигателя, можко использовать только для регистрации при кратковременной перегрузке.
Устройство обладает также дополнитель- ными преимуществами: если при Э1ссплуата- ции механическая нагрузка стабильна, а контроль механической перегрузки н.еобхо- дим тшько при изготовлении и испытании привода, то собственно контрольное уст ройство может быть установлено отаег/ьно в контрольной аппаратуре, что дает удобство
вать отработку аждого шага по импульс - -ным сигналам с выходов блоков 25 и 26 сравнения во время работы этих устройств
20 на вычитание; сигналы, идущие с выходов первого 39 и щестого 44 формирователя импульсов могут характеризовать исправность работы усилителя мощности, так как постоянный «О или «1 будут характеризовать отказ устройства управления; уже
25 существующие приводы легко оснастить средством контроля механической перегрузки без переделки собствен1 ого привода.
Формула изобретения
Устройство для контроля механической перегрузки шагового двигателя, работающего .4 режиме парной коммутации с импульсной стабилизацией тока фаз, содержащее первый блок сравнения, элемент И, элемент ИЛИ, отличающееся тем, что, с целью
,
уменьшения массы Й7а бар итов введе ньГв то рой блок сравнения, второй элемент И и фордо ройства для управления двигателем, а выхо- п,. .,,..л „.
ды исходного положения, импульсные и направления счета соединены с соответствующими входами блоков сравнения, выходы разрешения соединены с первыми входами элементов И, вторые входы которых соеди- 45 нены с выходами соответствующих блоков сравнения, а выходы - с входами элемента ИЛИ.
о-
35
J
37
Mlhh
&1
нач. сброс
Фи.5
39
53
40
44
45
41 48
фиг. 2
SO
SI
li
33
f
/ л ллд/лwлч vvv A /yVvVvVMVvv/v v/
-,-т .4 1
1;;П ПППпт 1П
I I , V I ;. 1 11 111 U 1 t
vVWA AWVVvA/y MV/
J.....
.i
JL.
Щ
I lit
mm
йЖ аич
ЖЕ
I :i
c . U J.
iiffn
Jsii A nT- i
Ш(. 4
1
JI
1
JL.
EH
iiffn
1
a у- -д -и дздш11ы a|
Л
| Устройство для управления шаговым двигателем | 1983 |
|
SU1111246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для отключения электродвигателя при перегрузке | 1985 |
|
SU1356175A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
