Изобретение относится к злектротехни- ке, в частности к системам автоматического управления шаговыми двигателями, и может быть использовано в шаговых злектро- приводах. работающих при изменяющихся в широких пределах нагрузках на валу и имеющих ограниченные угловые положения выходного вала.
Цель изобретения - повышение надежности отключения шагового двигателя.
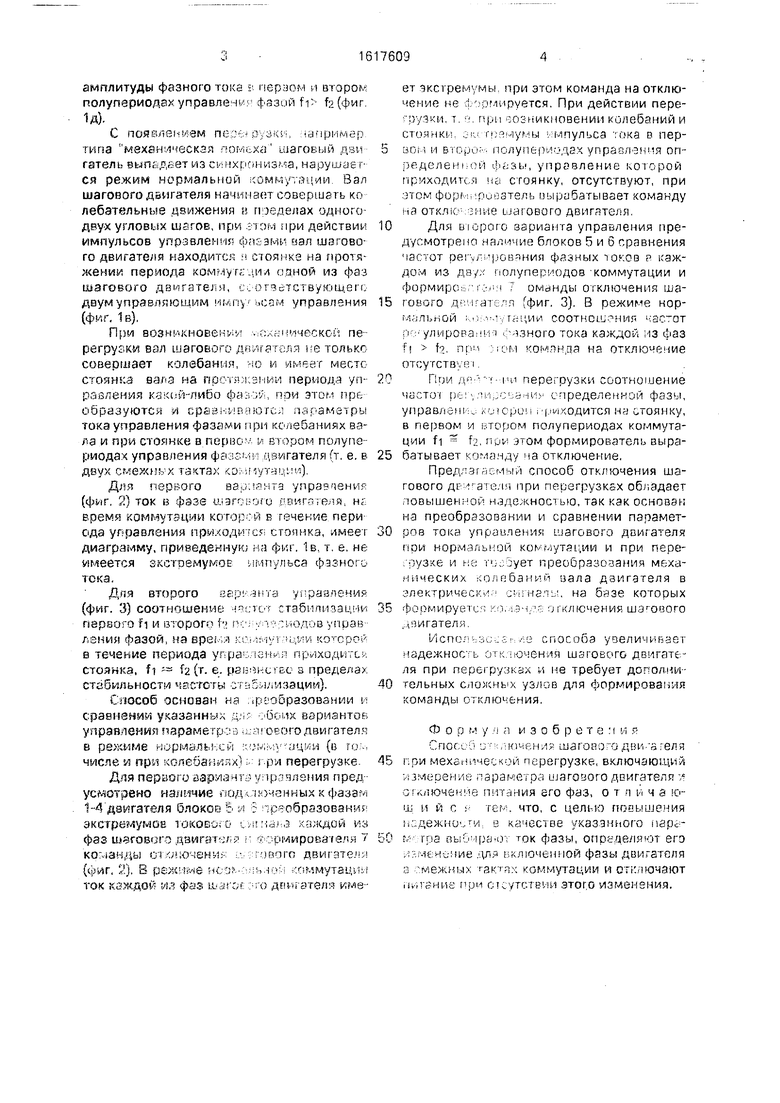
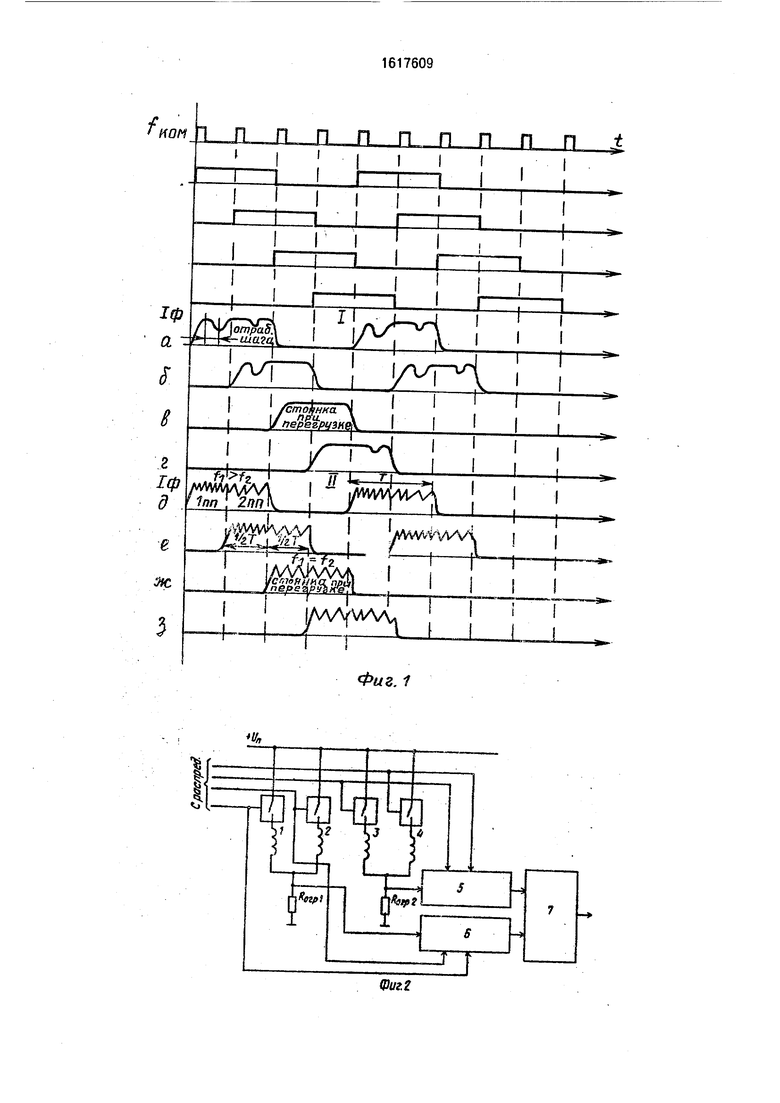
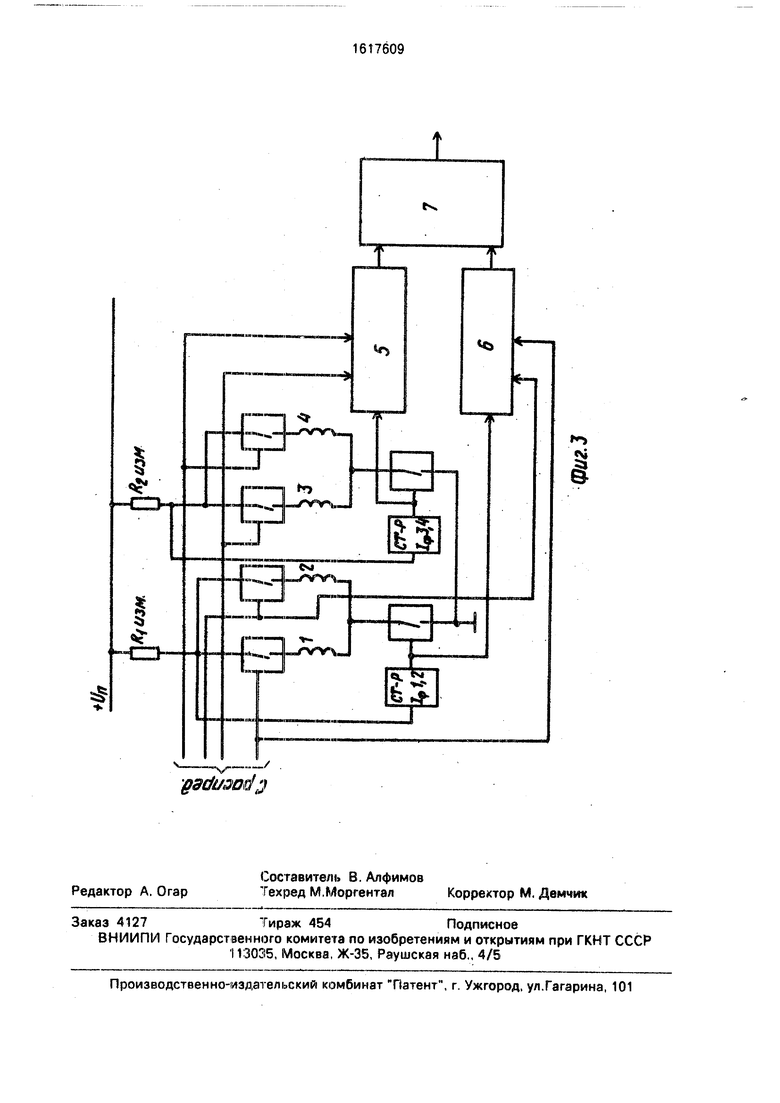
На фиг. 1 приведены диаграммы управления шаговым двигателем, поясняющие предлагаемый способ; на фиг. 2 - структурная схема устройства для осуществления предлагаемого способа при питании фазы непрерывным импульсом: на фиг. 3 - то же, при импульсной стабилизации тока фазы.
Способ осуществляют следующим образом.
При работе шагового двигателя в любом механизме с нагрузками, приведенными к валу двигателя, находящимися в пределах допустимых, вал шагового двигателя отслеживает управляющую диаграмму сигналов коммутации, т. е. синхронно с управляющими сигналами отрабатывает дискретн: le шаги в заданном направлении.
Рассмотрим режим нормальной коммутации для двух вариантов управления фазами шагового двигателя (фиг. 2 и 3).
Для варианта управления с питанием фазы непрерывным импульсом на время включения и с ограничивающим резистором в смежных фазах режим характеризуется тем, что ток в фазе шагового двигателя изменяется по закону, зависящему от перемещения якоря и изменения магнитных параметров системы, причем уменьшение фазного тока соответствует отработке шага, т. е. при отработке шага имеют место зкс тремумы токового сигнала (фиг. 1а. б).
Для варианта управления с регуляторами тока, например, по принципу токовый коридор в фазах шагового двигателя (фиг. 3) режим характеризуется наличием определенного соотношения частот регулирования
я ON
О
о
амплитуды фазного тока si первом и втором; полупериодахуправленм фазой fi f2(фиr,
1A).
С появлеи /;8м neijfc-i оузк:- , Manpi-i iep типа механ. 1мескзя помеха шаговый дви гатель выпйдеет из синхронизма, Hapyujaer- ся режим нормальной 1(Омму г,Э11ии. 8зл шагового двигателя начинает совершать ко лебэтельные движения в п|эеделах одного- двух угловых, шагов, при .лом при действии импульсов упрзвленм5 фазами вал шагового двигателя находится н стоянка на г ротя- женин периода коммуг;;,1ил одной из фаз шагового двигателя, CL огзетствующего двум управляющим ni ny/ьсам управления (фиг, 1в),
При возникновении .схниической пе-- регрузкм вал шагового двигателя )е только соверигает колебания, но и имеет место стоянка на Г(рстя):; ам1/1и периода уп- раелеиия как(,1Й-либо фа;;ой, при этом пре образуются м сразмиваязтсл параметры тока управления фазами при колебаниях вала и при стоянке в nepisov, i.-i втором полупериодах управления фазг -ш 1:13 /1гателя (т, е, в двух смежнух тактах олигутац; ;),
Для первого упрзвпения (фиг. 2) ток в фазе шагового двигателя, нг. время комнутэции которой в течение перм- ода уг равления приходите ; стоянка, имеет диаграмму, приведенную на фмг. 1в, т, е, не имеется зкстремумов импульса фазного тока.
Для второго Вир /.а II та упраз.пения (фиг. 3) соотноашиие ччс-гс Т сгаб1 1пизаид И переого fi и второго f-; пс ;::. :л ::11одов управ ленмя фазой, на вре1- ;л которой в течение периода ynpai;. приходите. стоянка, ft (2 (т. е. ра;9 нсгЕс в пределах стабильност частоту ств5:/ ;1мзацим).
Способ основан на г.реобразовании и сравнении указанных д. ;: вари,антов управления параметров i;j;- ii оеого двигателя в режиме нармалькей .;у ац1 1и {в то:- числе Л nps-i KoneoaHi-iFix) : г.ри перегрузке.
Для первого аармаигэ управления предусмотрено налютие Г1одл.;|к)чанных к фазам 1 4 д9игателя блоков Ъ -л 8 яреобразовангдя экстремумов токового .iitMdiu3 каждой из фаз шагового даигат ;; г. Формирователя 1 команды О1 ;O iO4eHvi : ;л:;:г:)вого двигателя (фйг. 2). Е (e ио 0. --;ьной .коммутации ток каждой V,. фаз u-aror: :-го двигателя эксгремумьк при этом команда на отключение не Ф ;рмируется. При действии перегрузки, т,е, при возникновении колебаний и стоянки. тпямумы 1 мпульса тока в перBOi-i и Бторо;-. полупб)иодах управления определенной фьзы, управление которой преходится на стоянку, отсутствуют, при это,м формириизтель иырабатывает команду на откл1о ;зние шагового двигателя,
Для вюрого варианта управления предусмотрена на и-1чие блоков 5 и б сравнения частот регуЛ1 ров ния фазных токов в каждом из двух гюлупериодов -коммутации и формиро&г r;i.iM 7 оманды отключения шаГО8ОГО др.игателл (фиг, 3), В режиме нор- Г1;1альной ;..о:,-. утации соотношения частот рс; улировант с- зного тока каждой из фаз fj f, при jioM ком,ида на отключение отсутствуеI,
При др. --(- 141 перегрузки соотно1-иение
частот ре лИ;:с :ани спределенной фазы, управлсни.; лсмсрии i |л/1ходится Ни стоянку, в первом и втором полупериодах коммутации fi f., этом формирователь вырабатывает к.ома,н,цу на отключение,
Пред,тзгйемый способ отключения шагового .ч.ч при перегрузках обладает повышенной н,эдежностью, так как основэи на преобразовании и сравнении параметров тока управления шагового двигателя при нормальной ко Мута ии и при пере- ; рузхе и не TUciiyeT преобразозания механических 7;олнбаний зала двигателя в электрически - сигналь;, на базе которых
формируете ; K),/i,-j-i./; : отключения ш,Э 0 Юго .;л шгателя.
Использс.:;;-:/:е способа увеличиьзет надежность отк.чнзчения шагового двигателя при перегрузках и не требует доподиительных сложнь х узлов для формирования команды отключения.
Фор м у /J ;i изобретем и Способ 1}- ;,1ючения шагоког о дви. згеля
при механической перегрузке, включающий измерение параметра шагового двигателя -f. ог,члючен и5 питания его фаз, о т п и ч а ю- ш и и с тем. что, с целью повышения н;:дежно / /1, в качестве указанного fiapaг -; гра выбира-от TDK фазы, определяют его ; ;Я|-1енс-: ие для включенной фазы двигателя 8 смежных гак.тях коммутации и отг.лючагот
lii .rSHHS при отсутствии этого 11ЭМе -19НИЯ.
f
НОН
п п п п j
I I .1 I ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1989 |
|
SU1612372A1 |
| Устройство для контроля механической перегрузки шагового двигателя | 1989 |
|
SU1612371A1 |
| Устройство для управления многофазным шаговым двигателем | 1981 |
|
SU983965A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1012207A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1718362A1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1541560A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1314312A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1403333A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU728205A1 |
Изобретение относится к области электротехники, а именно к системам автоматического управления шаговыми двигателями, и может быть использовано в шаговом электроприводе, работающем при изменяющихся в широких пределах нагрузках на валу. Целью изобретения является повышение надежности отключения шагового двигателя при механической перегрузке. Команда на отключение шагового двигателя при перегрузке формируется путем преобразования и сравнения параметров фазного тока при колебаниях и стоянке вала двигателя, возникающих при перегрузках. При этом не требуется дополнительных сигналов, формируемых путем преобразования механических колебаний. 3 ил.
,
orripa -шага
а q
е
Фиг, 1
| Устройство для управления шаговым двигателем | 1983 |
|
SU1138919A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для отключения электродвигателя при перегрузке | 1985 |
|
SU1356175A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
