Изобретение относится к геодезии и геодезическому приборостроению и предназначено для решения задач вые- 20 шей геодезии, в частности для определения пространственных координат пунктов геодезических сетей в высокогорных районах, для решения задач инженерной геодезии, для выполнения 25 измерений на подвижных основаниях, когда невозможно ориентировать угломерный прибор по направлению отвесных линий поля силы тяжести Земпи, и выполнения вертикальной планировки30 местности, для решения задач космической геодезии, для выполнения необ- хбдимых измерений в отсутствие гравитационного поля
Цель изобретения - повышение про- 5 изводительности труда путем уменьшения объема полевых измерений и повышение точности за счет уменьшения влияния инструментальных погрешностей.40
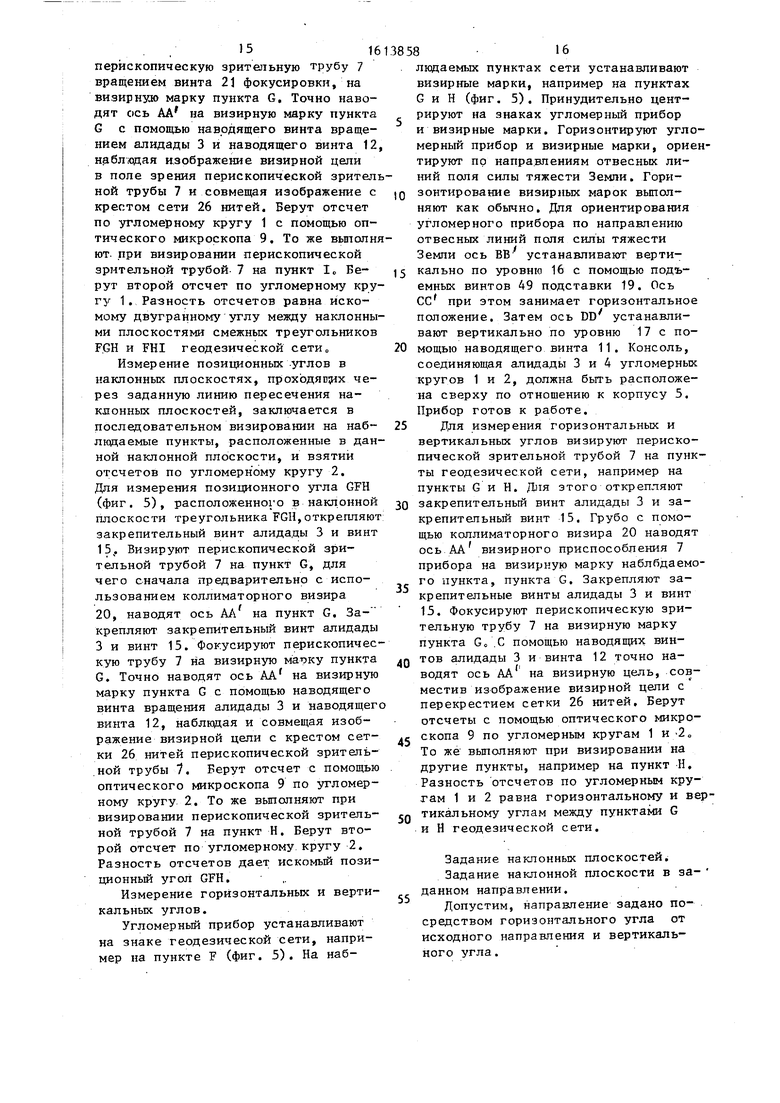
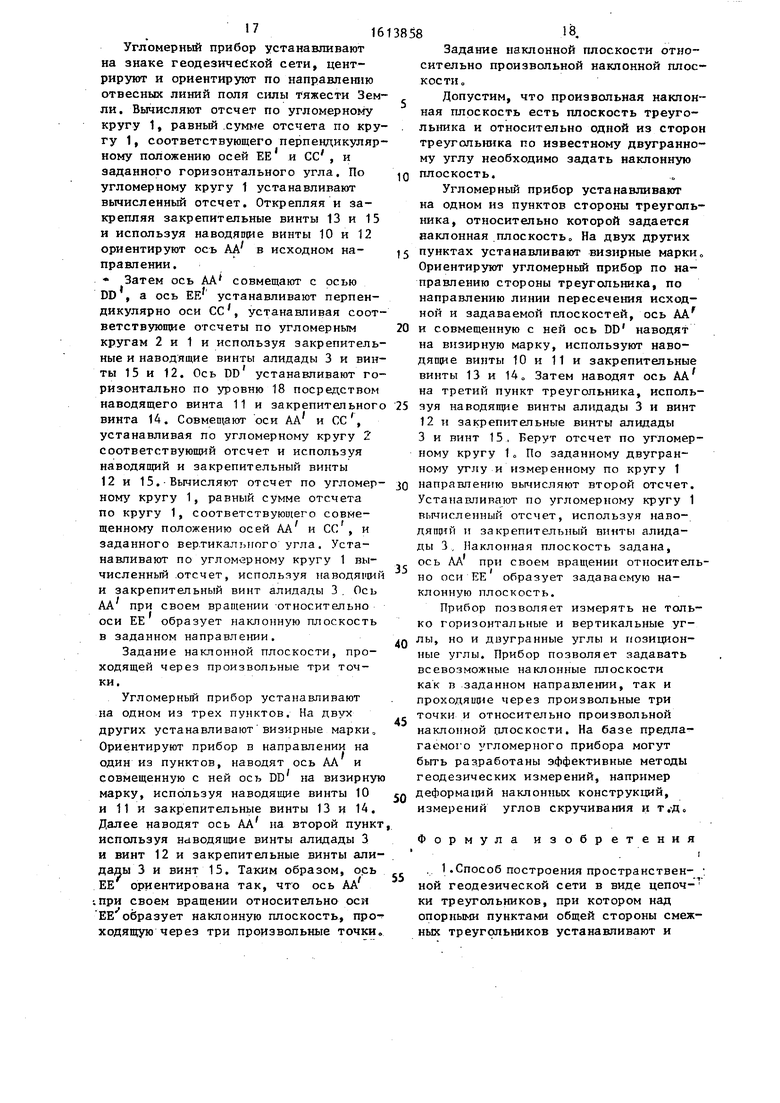
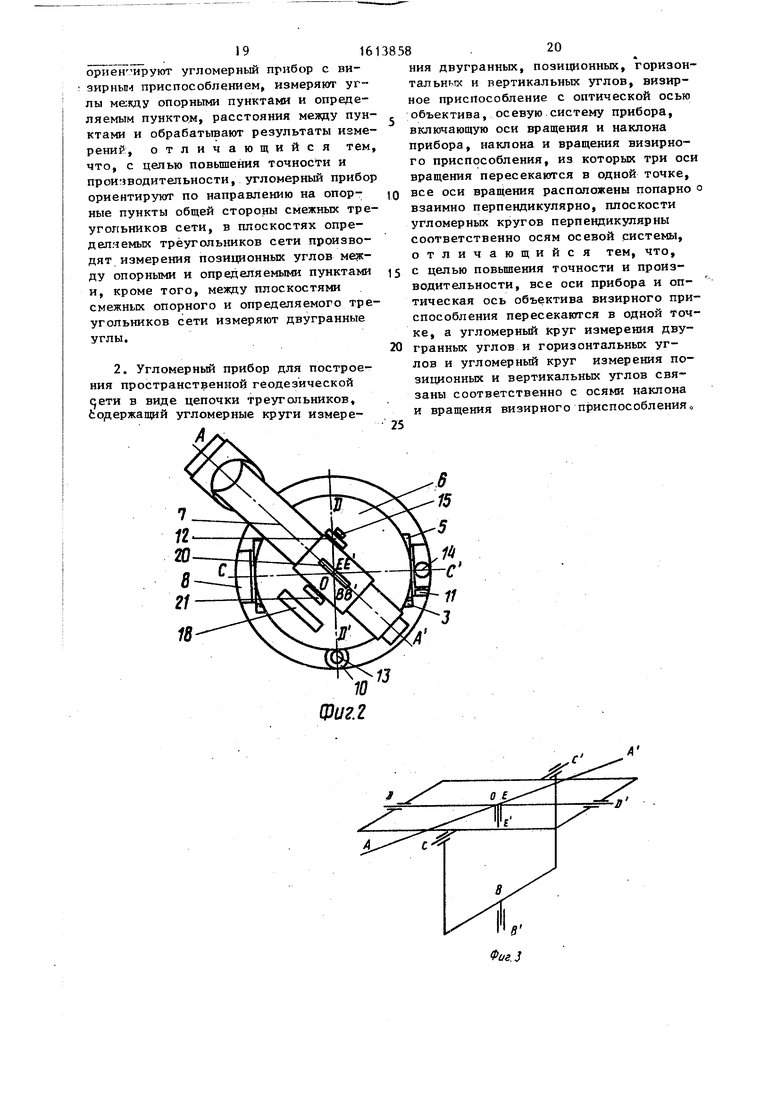
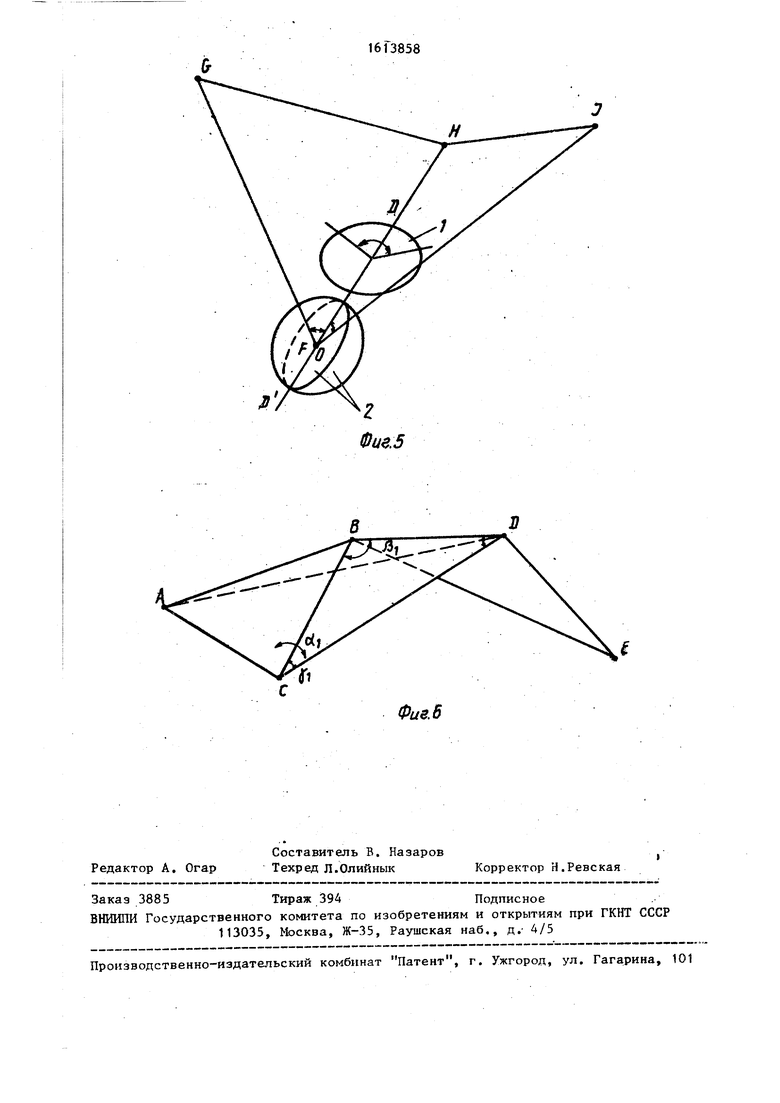
На фиг. 1 изображен угломерный прибор, вид сбоку; на фиг. 2 - то же, ВИД: сверху на фиг. 3 - кинематическая схема угломерного прибора; на фиг, 4 - оптическая схема угломер- 45 ного прибора; на фиг, 5 - схема измерения двугранных и позиционных углов; на фиг, 6 - фрагмент геодезической сети из пяти пунктов, образующих три пространственных треугольника«50
Способ включает ориентирование угломерного прибора по направлениям на пункты геодезической сети путем ориентирования оси наклона визирного приспособления угломерного прибора по направлению общих сторон смежных треугольников сети, по направлению сторон СВ и BD (фиг..6) смежных тре- : угольников ABC и BCD, BCD и BDE, измерение позиционных углов. Toe, углов в плоскости треугольника по соответствующему угломерному кругу прибора, установленному параллельно плоскости измеряемого позидаонного угла, изме- редае двугранных углов по соответствующему угломерному кругу, устанавливаемому перпендикулярно общим сторонам смежных треугольников сети, сторонам СВ и BD, измерение, расстояний между противолежащими исходными и определяемыми пунктами смежных треугольников, расстояний между пунктами AD смежных треугольников ЛВС и BCD и СЕ смежных треугольников BCD и BDE, а также вычисление координат Для осуществления способа определения пространственных координат требуется соответствующий угломерный прибор.
Рассмотрим решение задачи определения пространственных координат пунктов геодезической сети Известна длина одной из сторон и на начальнбм пункте сети определены астрономические широга, долгота и азимут.
В исходном треугольнике сети ABC (фиг, 6) в системе топоцентрических горизонтальных координат начального пункта, пункта А, определим положение двух других пунктов, пунктов В и С. Измерена длина стороны АВ,-Измерены с пункта А на пункты В и С горизонтальные углы и зенитные расстояния. По формулам аналитической геометрии определим направляювре косинусы направлений АВ и АС:
1 sin Zflg sin
тд sin Zne-cos Удв ; (D
Пдб cos
1,.. sin Z...sin V.« :
Ac
ACMO
m
n,
sin Z. cos Va
AC -AC °s Mpi
(2)
AC - AC
В треугольнике ABC согласно предлагаемому способу измерены также углы между направлениями , LASC, /.ВСЛо
По значениям направляющих косинусов и длинам сторон АВ АС Удс (длину стороны АС вычисляют по теореме синусов) определим координаты пунктов В и С в системе топоцентрических горизонтальных координат пункта А;
13858
Вычислив координаты пунктов В и С
пространственного треугольника ABC, по измеренным позиционным углам между направлениями, Z,CBD BCD
5 , по измеренному двугранному углу между плоскостями треугольников ABC и BCD, углу 0, , определим координаты пункта D в системе топоцентрических горизонтальных координат t пункта АО Для этого выразим измеренные позиционные и двугранный углы через известные координаты пунктов А, В, С и неизвестные координаты
,5 пункта D (Х., Y., Z.) и составим систему уравнений.
10i

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ЗАДАННЫМ СТВОРОМ И ОБЪЕКТОМ | 1972 |
|
SU339779A1 |
| ТЕОДОЛИТ | 1994 |
|
RU2079104C1 |
| ОПТИЧЕСКИЙ ТЕОДОЛИТ | 1992 |
|
RU2053483C1 |
| Подвесный буссольный прибор | 1924 |
|
SU4151A1 |
| ОПТИЧЕСКИЙ ТЕОДОЛИТ | 1991 |
|
RU2036421C1 |
| Устройство для установки отражающего элемента в заданное положение | 1981 |
|
SU949337A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| Устройство для измерения зенитных расстояний и рефракции | 1984 |
|
SU1295229A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЛАКОВ | 1934 |
|
SU43753A1 |
| Двухтрубный теодолит | 1931 |
|
SU27201A1 |
Изобретение относится к геодезии и геодезическому приборостроению и предназначено для решения задач высшей, инженерной и космической геодезии. Изобретение позволяет повысить точность и производительность работ. Способ включает ориентирование угломерного прибора по направлениям на пункты геодезической сети путем ориентирования одной из осей вращения прибора по направлению общей стороны смежных треугольников сети. Ось наклона визирного приспособления совмещают с линией пересечения плоскостей смежных треугольников, измеряют позиционные углы, углы между направлениями по угломерному кругу 2, вертикальные и позиционные углы в плоскости измеряемого позиционного угла, двугранный угол между плоскостями треугольников по угломерному кругу, устанавливаемому перпендикулярно общей стороне смежных треугольников, расстояние между противолежащими исходными и определяемым пунктами смежных треугольников и вычисляют координаты из решения системы уравнений. Угломерный прибор содержит угломерные круги 1 и 2 с алидадами 3, 4 и корпусами, визирное приспособление 7 и систему осей, состоящую из осей вращения прибора, наклона прибора, наклона визирного приспособление и вращения визирного приспособления. Устройство содержит колонки 8, отсчетное приспособление 9, наводящие 10, 11 и зажимные 13, 14 приспособления, уровни 16, 17, 18, подставку 19, центрирующее приспособление. Визирная ось и все оси вращения пересекаются в одной точке О. Визирное приспособление 7 выполнено в виде перископической зрительной трубы, закрепленной на корпусе угломерного круга 2, который скреплен с алидадой 4. 2 с.п.ф-лы, 6 ил.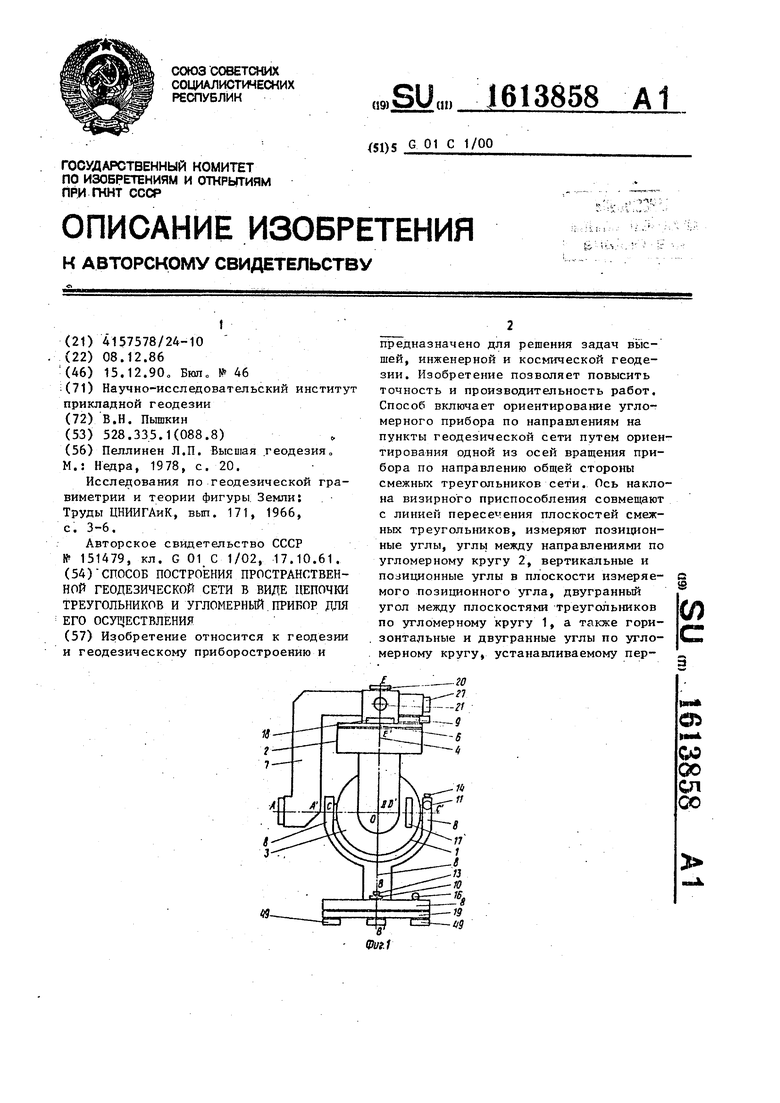
дв .1дв;
VftB-niftB;
Vflc iftc;
V™Ac;
УДС-ПАС.
(3)
(4)
-,- Координаты нормального вектора
+ B,Y + + D О - уравне-плоскости треугольника BCD определим
ние плоскости треугольника из выражений:
N
yj,(Zg- Z,) - ZjjCY - YC) + ( Y,Z) yjj&Z,,- P, ;
в, D
XgZftl XcZcl
XI,ZDI
XjYel
XJel
1,1
XJcZc
-XJ,(ZB- ) + z.p( x) - (,- ) -x, Zj AXgc- FBI ;
(6)
x(Ye- Y,) - Xc) + .( x.Y) PC ;
Плоскости треугольника ABC и BCD образуют между собой угол, равный измеренному двугранному углуо(,:
Запишем уравнения плоскостей тре- ,угольников ЛВС и BCD.
А„Х + +
+ D О - уравнение плоскости треугольника ABC
Координаты нормального вектора плоскости треугольника ABC найдем по формулам:
В В В .ZC
(5)
совй, .BaBLl- aCi(7
+ BJ + C TJAV Е|+ cf
,71613858I
.
или, подставив вместо А, В, С значения, йолучаем
&ugK-rJaMiteJLi:aUjLiiiCrsat a l-2E g ar-LttI-±- ai2a -fSiti
, - M&ugK-rJaJuiaJL aUJL jdrSabSa l EAxi c
ЦА О в + qj4 y uZp5- Zj,bYBc г, ) +(,)(хвЬТве-уд4Х„ р у)
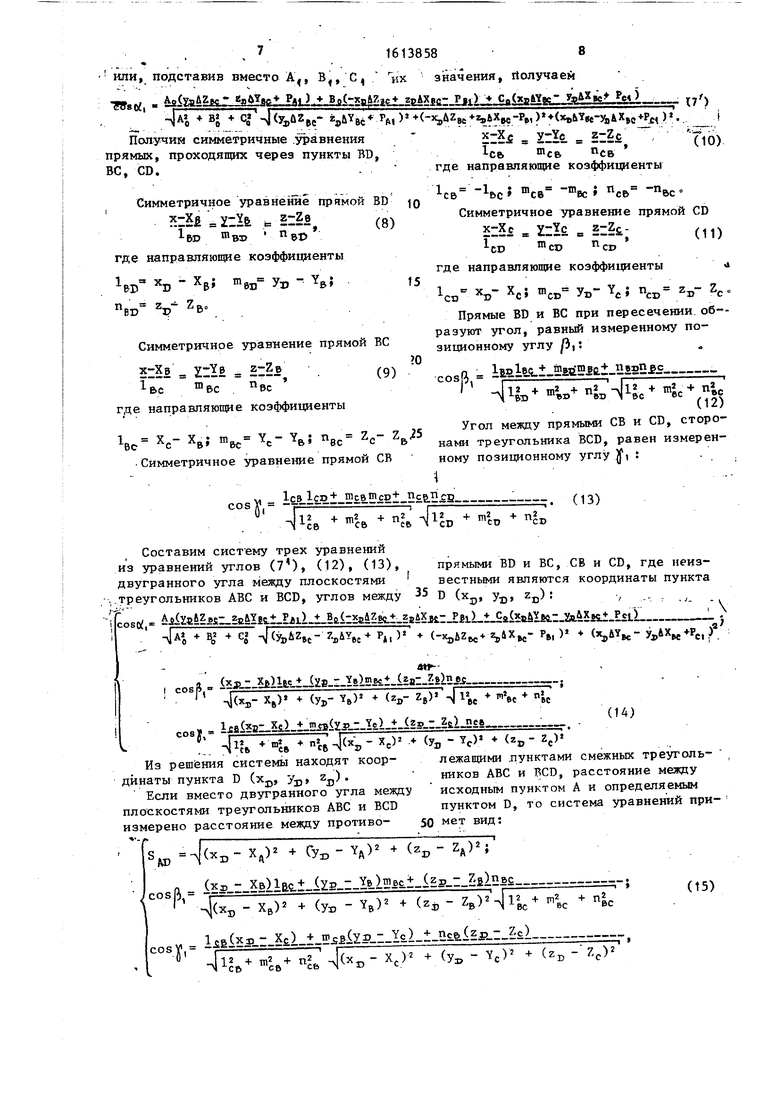
Получим симметричные .уравнения 2l i s ZliS. El
прямых, проходящих через пункты BD, ев СБ
ВС, CD.
где направляющие коэффициенты
. . - „ „.,- ICB V се К сь
Симметричное уравнение прямой BD Q
„ - -.пГмикгофпиинпр ттпяянение поямп
Х-Хв V-YR Z-Ze/04
.. 2.Е я.(.о)
IBD et) где направляющие коэффициенты
Чр D - BJ вВ УЗЗ - Б ВР V В
Симметричное уравнение прямой ВС
Симметричное уравнение прямой CD $z5c . Zzic (,)
-CD
m
CD
n
CD
15
где направляющие коэффициенты
1с1з и- cS «, - 2с- Прямые BD и ВС при пересечении, об-- разуют угол, равный измеренному позиционному углу PI.
n 1вр1вс %Й55С.1-11 2Н 5----
cos ) | 1 I--г
« п|.Р4с ™ ()
Угол между прямыми СВ и CD, стороi.gp- -х. Agj iiigj.- j-c- IB вс нами треугольника BCD, равен измерен- .Симметричное уравнение прямой СВ ному позиционному углу |i :
. I-l ---5
-ВС
m
ВС
n
(9)
0
ее
где направляющие коэффициенты
i
.. 1св1со+ mcBincD+ .lics
cos I -
If
Cb
(13)
Составим систему трех уравнений
и з уравнений углов (7), (12), (13), прямыми BD и ВС, СВ и CD, где неиз- двугранного угла между плоскостями вестными являются координаты пункта ..треугольников ABC и BCD, углов между 35 D (х,, у-ц, z) : , ., , ,,
cosut « JsiXu B r Eb4Ilt± 2AlLi 5.r2EE45§.t-52A itr EllLl-2al5a6lK..
ЧА О Ч - с| (ypiZej- 7.„4У,,+ р,,) + (-xj,iz Р,)« У1,
а (xj,- Xft)lge (УД - Ye)gMl-i aZ- slS.et.-;
4(г- Xft) (у,- б) (ZB- ZB) л| «и
, ljfi(xBr-X).l.ajg YP- - -±- Eg-:-ZdJI 5. -li cs Ь 4() (УВ-V - V
(14)
ИЗ решения системь, находят коор- а- - Гр с ГоГниГ Гу
между исходнь. пунктом А и опредеяяемь. плоскостями треугольников ABC и BCD пунктом D, то система уравнений при
измерено расстояние между противо-50 мет вид:
s -( х,) -ь Сузэ- Yft) ( ZA);
,, (хл, - хв) (IP .(g.i Salii5 --;
( - (уГ-Ч) - (. - ZB) Чс -
l Bl 3L -X l-±-g B()t-S.
1с
(t5)
1 лл ч.л3 s,- :ijit ;,cr-.-.---- --- - -(У.) - (в - с)
П )
Тю)
сь ев СБ
где направляющие коэффициенты
Гмикгофпиинпр ттпяянение
Симметричное уравнение $z5c . Zzic
-CD
m
CD
n
CD
15
(9)
0
(13)
(14)
--;
1с
(t5)
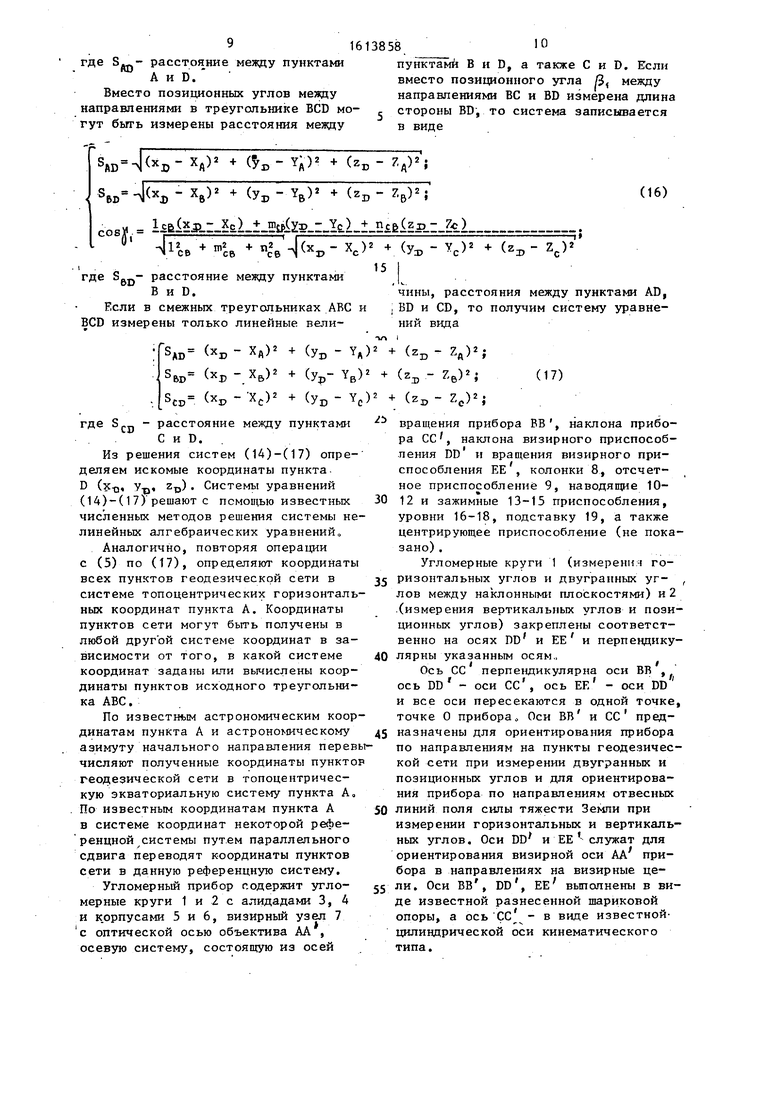
где расстояние мезкду пунктами
А и D.
Вместо позиционных углов между направлениями в треугольнике BCD могут бьггь измерены расстояния между
SftD л|(Хв- Хд) + (в- Уд) -f Czj,- 7,)2-j «615 (x.i,- Xg) + (yj,- YB) + (2„- 7.)2}
cos
J
lcblxj)),())
4
CB - cb
где расстояние между пунктами
В и D.
Если в смежных треугольниках ABC и BCD измерены только линейные велиr - Xc) Г(У:о- c) - ( 2) 15
чины, расстояния между , BD и CD, то получим сис ний вида
где Sp- - расстояние между пунктами С и D. .
Из решения систем (14)-(17) определяем искомые координаты пункта. D (х, у, Zp). Системы уравнений (14)-(1 7) решают с помощью известных численных методов решения системы нелинейных алгебраических уравнений
Аналогично, повторяя операции с (5) по (17), определяют координаты всех пунктов геодезической сети в системе топоцентрических горизонтальных координат пункта А. Координаты пунктов сети могут быть получены в любой другой системе координат в зависимости от того, в какой системе координат заданы или вычислены координаты пунктов исходного треугольника ABC.
По известным астрономическим координатам пункта А и астрономическому азимуту начального направления перевчисляют полученные координаты пункто геодезической сети в топоцентричес- кую экваториальную систему пункта А, По известным координатам пункта А в системе координат некоторой рефе- ренцной системы путем параллельного сдвига переводят координаты пунктов сети в данную референцную систему.
Угломерный прибор содержит угломерные круги 1 и 2 с алидадами 3, 4 и корпусами 5 и 6, визирный узел 7 с оптической осью объектива АА , осевую систему, состоящую из осей
пунктами В и D, а также С и D, Если вместо позиционного угла в, между направлениями ЕС и BD измерена длина стороны BD , то система записывается в виде
(16)
ni
чины, расстояния между пунктами AD, , BD и CD, то получим систему уравнений вида
вращения прибора ВВ , наклона прибора СС , наклона визирного приспособления DD и врап1ения визирного приспособления ЕЕ , колонки 8, отсчет- ное приспособление 9, наводящие 1012 и зажимные 13-15 приспособления, уровни 16-18, подставку 19, а также центрирующее приспособление (не показано) .
Угломерные круги 1 (измерение горизонтальных углов и двугранных уг- , лов между наклонными плоскостями) и 2 .(измерения вертикальных углов и пози- ционньк углов) закреплены соответственно на осях DD и ЕЕ и перпендикулярны указанным осям.,
Ось СС перпендикулярна оси ВВ , ось DD - оси СС , ось ЕЕ - оси DD и все оси пересекаются в одной точке, точке О прибора о Оси ВВ и СС предназначены для ориентирования прибора по направлениям на пункты геодезической сети при измерении двугранных и позиционных углов и для ориентирования прибора по направлениям отвесных
иний поля силы тяжести Земли при измерении горизонтальных и вертикальных углов. Оси DD и ЕЕ служат для ориентирования визирной оси АА прибора в направлениях на визирные цеи. Оси ВВ , DD , ЕЕ выполнены в вие известной разнесенной шариковой опоры, а ось СС - в виде известной- цилиндрической оси кинематического типа.
и
На подставке 19 с возможностью вращения относительно оси ВВ закреплены колонки 8. В колонках 8 с возможностью вращения относительно,оси СС закреплен корпус 5 угломерного круга 1. Корпус 5 соединен. с атшдадой 3 угломерного круга 1 с возможностью вращения относительно оси DD , На алидаде 3 консольно.закреплена алидада 4 угломерного круга 2„ С алидадой 4 скреплен корпус 6 угломерного круга 2 с возможностью вращения относительно оси ЕЕ . На корпусе б
10
загфеплено визирное приспособление 7„
Визирная ось М перпендикулярна оси ЕЕ и проходит через точку О .пересечения осей, прибора. Визирный узел. вьшолнен, например, в виде известной перископической зрительной трубы с коллиматорньш. визиром 20 и винтом 21 фокусировки. Оптическая схема перископической зрительной трубы 7 включает, например,, объектив 22, отражаюпще зеркала 23 и 24, фокусирующую линзу 25, сетку 26 нитей и окуляр 27.
Отсчетное приспособление 9 может быть выполнено в виде изв.естных оптических микроскопов. В предлагаемом угломерном приборе отсчетное приспособление 9 выполнено, например, в виде шкалового оптического микро- ckona В приборе применена оптическая сх.ема с , независимыми оптическими каналами получения изображе1ШЙ угломерных кругов 1 и 2 в плоскости шкалы-коллектива 28. Оптическая схема микроскопа 9 включает иллюминаторы 29 и 30, коллективы 31 и 32, линзы 33-36, призмы 37-46, объектив 47 и окуляр .48. Окуляр 48 оптического микроскопа 9 расположен рядом с окуляром 27 перископической зрительной трубы 7.
Наводящие приспособления состоят из наводящих винтов 10 (вращения прибора относительно оси ВВ ), 11 (наклона прибора относительно оси СС ), наводящего винта вращения алидады 3 (не показан) относительно оси DD , 12 (вращения корпусе 6 относительно оси ЕЕ ), Зажимные приспособления состоят из закрепительных винтов 13 (вращения прибора), 14 (на1613858
льзованы известные наводящие.и закрепительные винты.
уровень 16 скреплен, с колонками 8 И служит для приведения оси ВВ в вертикальное положениво Уровень 17 за креплен на алидаде 3 и предназначен для приведения оси DD в вертикальное положение. Уровень 18 закреплен на корпусе 6 и служит для приведения оси ЕЕ в вертикальное положение. Кроме того, алидада 4 угломерного круга 2 снабжена уровнем (не показан) для приведения алидады 4 в го- .с ризонтальное положение при измерении вертикальных углов.
Подставка 19, снабженная подъемными винтами 49 (фиг 1), служит для установки и надежного закреппе- 20 ния угломерного прибора на головке, щтатива или на столике геодезического знака, а также для ориенти о- вания прлбора относительно отвесных линий поля сипы тяжести Земли при 25 измерении горизонтальных и вертикаль ных углов о
В качестве центрирующего приспособления (не показано) в предлагаемом угломерном приборе могут быт.ь 30 использованы известные оптические отвесы или приспособления для принудительного центрирования прибора на геодезическом знаке.
Принцип действия отсчетного приспособления 9 угломерного прибора состоит в .следующем
Угломерные круги 1 и 2 освещаются через иллюминаторы 29 и 30. Световой пучок коллективом 31 направляется на угломерный круг 1 , Изображение щтрихов делений угломерного круга 1 с помощью призм 37-42 и линз 33 и 34 объектива проецируется в плоскость шкалы, нанесенной на плоской поверхности коллектива 28, Угломерный круг 2 освещается коллективом 32 Изображения штрихов круга 2 линзами 35 и 36 проетуфуются в плоскость шкалы-коллектива 28 „ Призмь: 43-45 изменяют направление хода луча Изоб ражения щкал микроскопа вместе с изображениями штрихов делений угломерных кругов 1 и 2 объективом 47 передается в фокальную плоскость окуляра 48 оптического микроскопа.9
35
40
45
50
:°:„: 5 :Г зГкГеГ ь:1г:,- „:„;™;; „а„ра. .о„.
JVJ iVVJl - -AJ.J-X - V t----/J-J.
та алидады 3 (не показан), 15 (корпуса 6) с. В качестве наводя1дих и зажимных приспособлений прибора исполучейс
Направление проецирования центра
геодезического знака на высоту .рас10
13858
льзованы известные наводящие.и закрепительные винты.
уровень 16 скреплен, с колонками 8 И служит для приведения оси ВВ в вертикальное положениво Уровень 17 закреплен на алидаде 3 и предназначен для приведения оси DD в вертикальное положение. Уровень 18 закреплен на корпусе 6 и служит для приведения оси ЕЕ в вертикальное положение. Кроме того, алидада 4 угломерного круга 2 снабжена уровнем (не показан) для приведения алидады 4 в го- .с ризонтальное положение при измерении вертикальных углов.
Подставка 19, снабженная подъемными винтами 49 (фиг 1), служит для установки и надежного закреппе- 20 ния угломерного прибора на головке, щтатива или на столике геодезического знака, а также для ориенти о- вания прлбора относительно отвесных линий поля сипы тяжести Земли при 25 измерении горизонтальных и вертикальных углов о
В качестве центрирующего приспособления (не показано) в предлагаемом угломерном приборе могут быт.ь 30 использованы известные оптические отвесы или приспособления для принудительного центрирования прибора на геодезическом знаке.
Принцип действия отсчетного приспособления 9 угломерного прибора состоит в .следующем
Угломерные круги 1 и 2 освещаются через иллюминаторы 29 и 30. Световой пучок коллективом 31 направляется на угломерный круг 1 , Изображение щтрихов делений угломерного круга 1 с помощью призм 37-42 и линз 33 и 34 объектива проецируется в плоскость шкалы, нанесенной на плоской поверхности коллектива 28, Угломерный круг 2 освещается коллективом 32„ Изображения штрихов круга 2 линзами 35 и 36 проетуфуются в плоскость шкалы-коллектива 28 „ Призмь: 43-45 изменяют направление хода луча Изображения щкал микроскопа вместе с изображениями штрихов делений угломерных кругов 1 и 2 объективом 47 передается в фокальную плоскость окуляра 48 оптического микроскопа.9.
35
40
45
50
- „:„;™;; „а„ра. .о„.
„:„;™;; „а„ра. .о„.
лучейс
Направление проецирования центра
геодезического знака на высоту .расположения точки О пересечения осей прибора может производиться по перпендикуляру к установочной плоскости столика геодезического знака либо по направлению отвесных линий поля силы тяжести Земли. В первом случае ось ВВ прибора должна бьп-ь перпендикулярна установочной плоскости знака. Выполнение условия обеспечивается ис- ходным положением подъемных винтов 49, при котором винты 49 находятся в крайнем положении (полностью вкручены) . Во втором случае ось ВВ при
бора должна быть установлена по направлению отвесных линий поля силы тяжести с помощью уровня 16 вращением подъемных винтов 49 о
Б связи с указанным обстоятельством визирные марки, устанавливаемые на наблюдаемых пунктах, должны иметь высоту расположения центра марки, равную высоте расположения точки О прибора над установочной плоскостью знака, и иметь возможность проектиро- вания центра геодезического знака также по направлениям перпендикуляра к установочной плоскости столика геодезического знака либо по направлению отвесных линий поля силы тяжести.
В качестве примера рассмотрим случай проектирования центра геодезического знака по перпендикуляру к установочной плоскости столика геодезического знака.
Угломерньй прибор устанавливают на знаке геодезической сети, наприме на пункте F (фиг. 5), центрируют и ориентируют На наблюдаемых пунктах сети, например на пунктах С, Н, -1 (фиг. 5), устанавливают визирные марки, также центрируют и ориентируют. Центрирование, угломерного прибора и визирных марок принудительное и выполняется обычным способом. Подъемные винты 49 подставки 19 угломерного прибора, а также визирных марок находятся Б исходном положении , Ориентирование угломерного прибора при измерении двугранных и позиционных углов заключается в ориентировании оси DD прибора в направлениях на пункты геодезической сети, которые с пунктом установки прибора образуют линии пересечения плоскостей смежных треугольников сети, двугранные углы между которыми и необходимо измерить В данном примере (фиг. 5) ось ПВ
угломерного прибора ориент1футот в направлении лшпш FH, линии пересечения плоскостей треугольников FGH и FH. Для ориент1фования ось АА сов5
0
0
5
5
40
мещают в осью DD и DD
как оси АА
оси ЕЕ и все три оси АА
что возможно, так перпендикуляр ны
ЕЕ и DD
45
50
55
пересекаются в точке пересечения осей прибора Совмещение осей АА и DD вьшолняют установкой отсчета по угломерному кругу 2, соответствующего совмещенному положению осей, значение которого определяется в процессе исследований и юстировки прибора.
Установку отсчета выполняют вращением корпуса 6 от руки, открепив закрепительный винт 15, и наводящим винтом 12, закрепив при этом винт 15о По оптическому микроскопу 9 устанавливают заданный отчет на угломерном круге 2, соответствующий совмещенному положению осей АА и DD . Затем наводят ось АА и совмещенную с ней ось DD на наблк(цаемый пункт геодезической сети, в данном примере на пункт Н (фиг. 5). Сначала предварительно с помоБ1ьн) коллиматор ног о визира 20 производят ориентирова1ше оси АА в направлении на пункт Н, открепляя и закрепляя при этом закрепительные винты 13 и 14„ Фокусируют пери- , скопическую зрительную трубу 7 вращением винта 21 фокусировки. После этого выполняют точное наведеште оси АА и совмещенной с ней оси DD на визирную марку ; аблюцаемого пункта, пункта Н (фиг. 5). Наведение выполняют с помощью наводящих винтов 10 и 11, совмещая изображение визирной цели с крестом сети 26 нитей зрительной трУбы 7. Ориентирование угломерного прибора закончено, прибор готов к работе.
Измерение двугранных углов между наклонными плоскостями смежных треугольников сети заключается в последовательном визировании на противолежащие вершины треугольников, на пункты Си 1 (фиг. 5), и взятия отсчетов по угломерноьгу кругу 1 . Для .измерения двугранного угла между плоскостями треугольников FGH и FH открепляют закрепительный винт алидады 3 и закрепительный винт 15. Предварительно с использованием колиматорного визира 20 наводят ось АА на пункт G. Закрепляют закрепительный винт алидады 3 и закрепительный винт 15. Фокусируют
. ,1516
перископическую зрительную трубу 7 вращением винта 21 фокусировки, на визирнзоо марку пункта G, Точно наводят ось АА на визирную марку пункта G с помощью наводящего винта вращением алидады 3 и наводящего винта 12, наблюдая изображение визирной цели в поле зрения перископической зрительной трубы 7 и совмещая изображение с крестом сети 26 нитей. Берут отсчет по угломерному кругу 1 с помощью оптического микроскопа 9. То же выполняют, при визировании перископической зрительной трубой 7 на пункт 1„ Берут второй отсчет по угломерному кру- гу 1. Разность отсчетов равна искомому двугранному углу между наклонными плоскостями смежных треугольников FGH и FHI геодезической сети о
Измерение позиционных углов в наклонных плоскостях, прохЬдяп 1х через заданную линию пересечения наклонных плоскостей, заключается в последовательном визировании на наблюдаемые пункты, расположенные в данной наклонной плоскости, и взятии отсчетов по угломерн ому кругу 2. Для измерения позиционного угла GFH (фиг. 5), расположенного в наклонной плоскости треугольника FGH, открепляют закрепительный винт алидады 3 и винт 15, Визируют перископической зрительной трубой 7 на пункт G, для чего сначала предварительно с использованием коллиматорного визира 20, наводят ось АЛ на пункт G. За- крепляют закрепительный винт алидады 3 и винт 15. Фокусируют перископическую трубу 7 на визирную марку пункта G. Точно наводят ось ЛЛ на визирную марку пункта G с помощью наводящего винта вращения алидады 3 и наводящего винта 12, наблюдая и совмещая изображение визирной цели с крестом сетки 26 нитей перископической зритель- .ной трубы 7. Берут отсчет с помощью оптического микроскопа 9 по угломерному кругу. 2. То же выполняют при визировании перископической зрительной трубой 7 на пункт Н. Берут второй отсчет по угломерному кругу 2. Разность отсчетов дает искомый пози- ционньй угол GFH.
Измерение горизонтальных и вертикальных углов.
Угломерный прибор устанавливают на знаке геодезической сети, например на пункте F (фиг. 5). На наб85816
. лкдаемых пунктах сети устанавливают визирные марки, например на пунктах G и Н (фиг. 5). Принудительно центрируют на знаках угломерный прибор и визирные марки. Горизонтируют угломерный прибор и визирные марки, ориентируют по напра.влениям отвесных линий поля силы тяжести Земли. Гори0 зонтирование визирных марок вьшол- няют как обычно. Для ориентирования угломерного прибора по направлению отвесных линий поля силы тяжести Земпи ось ББ устанавливают верти-
5 кально по уровню 16 с помощью подъемных винтов 49 подставки 19. Ось СС при этом занимает горизонтальное положение. Затем ось DD устанавливают вертикально по уровню 17 с по0 мощью наводящего винта 11. Консоль, соединяющая апидады 3 и 4 угломерных кругов 1 и 2, должна быть расположена сверху по отношению к корпусу 5. Прибор готов к работе.
5 Для измерения горизонтальных и вертикальных углов визируют перископической зрительной трубой 7 на пункты геодезической сети, например на пункты G и Н. Для этого открепляют
0 закрепительный винт алидады 3 и за- крепитепьньй винт 15. Грубо с помощью коллиматорного визира 20 наводят ось АА визирного приспособления 7 прибора на визирную марку наблбдаемо- го пункта, пункта G. Закрепляют закрепительные винты алидады 3 и винт 15. Фокусируют перископическую зрительную трубу 7 на визирную марку пункта Go .С помощью наводящих виндд тов алидады 3 и винта 12 точно наводят ось АА на визирную цель, совместив изображение визирной цели с перекрестием сетки 26 нитей. Берут отсчеты с помощью оптического микроскопа 9 по угломерным кругам 1 и -20 То же вьшолняют при визировании на другие пункты, например на пункт Н. Разность отсчетов по угломерным кругам 1 и 2 равна горизонтальному и вертикальному углам между пунктами G
4S
50
и Н геодезической сети.
Задание наклонных плоскостей Задание наклонной плоскости в за- данном направлении.
Допустим, направление задано посредством горизонтального угла от исходного направления и вертикального угла.
Угломерный прибор устанавливают на знаке геодезической сети, центрируют и ориентируют по направлению отвесных линий поля силы тяжести Земли. Вычисляют отсчет по угломерному кругу 1, равный .cyMtfe отсчета по кругу 1, соответствующего перпендикулярному положению осей ЕЕ и СС , и заданного горизонтального угла. По угломерному кругу 1 устанавливают вычисленный отсчет. Открепляя и закрепляя закрепительные винты 13 и 15 и используя наводяп(ие винты 10 и 12 ориентируют ось АА в исходном направлении.
Затем ось АА совмещают с осью DD , а ось ЕЕ устанавливают перпендикулярно оси СС , устанавливая соответствующие отсчеты по угломерным кругам 2 и 1 и используя закрепительные и наводящие винты алидады 3 и винты 15 и 12. Ось DD устанавливают горизонтально по уровню 18 посредством наводящего винта 11 и закрепительного 25 винта 14. Совмещают оси АА и СС , устанавливая по угломерному кругу 2 соответствующий отсчет и используя наводящий и закрепительный винты 12 и 15.Вычисляют отсчет по угломерному кругу 1, равный сумме отсчета по кругу 1, соответствуюв(его совмещенному положению осей АА и Сс , и заданного вер.тикал1 пого угла. Устанавливают по угломорному кругу 1 вычисленный .отсчет, используя наводягций закрепительный винт алидады 3. Ось
5
20
30
35
А при своем вращении относительно оси ЕЕ образует наклонную плоскость в заданном направлении.
Задание наклонной плоскости, проходящей через произвольные три точки.
Угломерный прибор устанавливают на одном из трех пунктов. На двух других устанавливают визирные марки. Ориентируют прибор в направлении на один из пунктов, наводят ось АА и совмещенную с ней ось DD на визирную марку, используя наводящие винты 10 и 11 и закрепительные винты 13 и 1. алее наводят ось АА на второй пункт, используя наводящие винты алидады 3 винт 12 и закрепительные винты алиады 3 и винт 15. Таким образом, ось ЕЕ ориентирована так, что ось АА при своем вращении относительно оси ЕЕ образует наклонную плоскость, про- одящую через три произвольные точки.
дл
ел
45
55
Задание наклонной плоскости относительно произвольной наклонной плоскости
Допустим, что произвольная наклонная плоскость есть плоскость треугольника и относительно одной из сторон треугольника по известному двугранному углу необходимо задать наклонную
плоскость.
Угломерный прибор устанавливают на одном из пунктов стороны треугольника, относительно которой задается наклонная плоскость. На двух других
пунктах устанавливают визирные марки Ориентируют угломерный прибор по направлению стороны треугольника, по направлению линии пересечения исходной и задаваемой плоскостей, ось АА
и совмещенную с ней ось DD наводят
5
0
5
на визирную марку, используют наво- дяп(ие винты 10 и 11 и закрепительные винты 13 и 14 о Затем наводят ось АА на третий пункт треугольника, используя наводящие винты алидады 3 и винт 12 и закрепительные винты алидады 3 и винт 15, Берут отсчет по угломерному кругу 1 о По заданному двугранному углу и измеренному по кругу 1 направлению вычисляют второй отсчет. Устанавливают по угломерному кругу 1 вычисленный отсчет, используя наво- и закрепительный винты алидады 3, Наклонная плоскость задана, ось АА но клонную плоскость.
Прибор позволяет измерять не только горизонтальные и вертикальные угл лы, но и двугранные углы и позиционные углы. Прибор позволяет задавать всевозможные наклонные плоскости как в заданном направлении, так и проходящие через произвольные три точки и относительно произвольной наклонной плоскости. На базе предла гаемого угломерного прибора могут быть разработаны эффективные методы геодезических измерений, например
л деформаций наклонных конструкций, измерений углов скручивания и т.-д.
5
при своем вращении отпоситель- оси ЕЕ образует задаваемую на
Формула изобретения
I
. 1 .Способ построения пространствен- : ной геодезической сети в виде цепоч- ки треугольников, при котором над опорными пунктами общей стороны смежных треугольников устанавливают и
1916
орГГёТг Труют угломерный прибор с ви- зирньп- приспособлением, измеряют углы мекду опорными пунктами и определяемым пунктом, расстояния между пунктами и обрабатывают результаты измерений, отличающийся тем, что, с целью повьшения точности и проигвводительности, угломерный прибор ориентируют по направлению на опорные пункты общей стороны смежных треугольников сети, в плоскостях опре- дел.чемых треугольников сети производят измерения позиционных углов между опорными и определяемыми пунктами и, кроме того, между плоскостями смежных опорного и определяемого треугольников сети измеряют двугранные углы.
85820
ния двугранньк, позиционных, горизон- тальньтх и вертикальных углов, визирное приспособление с оптической осью объектива, осевую систему прибора, включающую оси вращения и наклона прибора, наклона и вращения визирного приспособления, из которых три оси вращения пересекаются в одной точке,
0 все оси вращения расположены попарно о взаимно перпендикулярно, плоскости угломерных кругов перпендикулярны соответственно осям осевой системы, отличающийся тем, что,
15 с целью повьщ1ения точности и производительности, все оси прибора и оптическая ось объектива визирного приспособления пересекаются в одной точке, а угломерньй круг измерения дву20 гранных углов и горизонтальных углов и угломерный круг измерения позиционных и вертикальных углов связаны соответственно с осями наклона и вращения визирного п эиспособления о
р т
зг
«4
5
8 Фие.
Фие.6
| Пеллинен Л.П | |||
| Высшая .геодезия„ М | |||
| Недра, 1978, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Исследования по геодезической гравиметрии и теории фигуры | |||
| Земли: Труды ЦНИИГАиК, вып | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Прибор для определения астрономических координат на суше | 1961 |
|
SU151479A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
