а ел
05
ел
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2446454C1 |
| ПРОГНОЗИРУЮЩАЯ СИСТЕМА ОЦЕНКИ ЛЕТЧИКА ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1991 |
|
RU2006958C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2626338C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ДИФФЕРЕНЦИРУЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2535467C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2450343C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2459241C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2643645C2 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2680215C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2629643C2 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2622851C1 |
Изобретение относится к автоматическим самонастраивающимся системам управления и может быть использовано при построении адаптивных систем управления с компенсацией контролируемых и неконтролируемых возмущений. Цель изобретения - повышение точности и быстродействия. Система управления содержит источник 1 опорного сигнала, сумматор 2, исполнительный орган 3, объект управления 4, датчик 5, блок 6 полосовых фильтров, блок 7 оптимального управления, блок 8 управления тактовой частотой, цифроаналоговый преобразователь 9. 4 ил.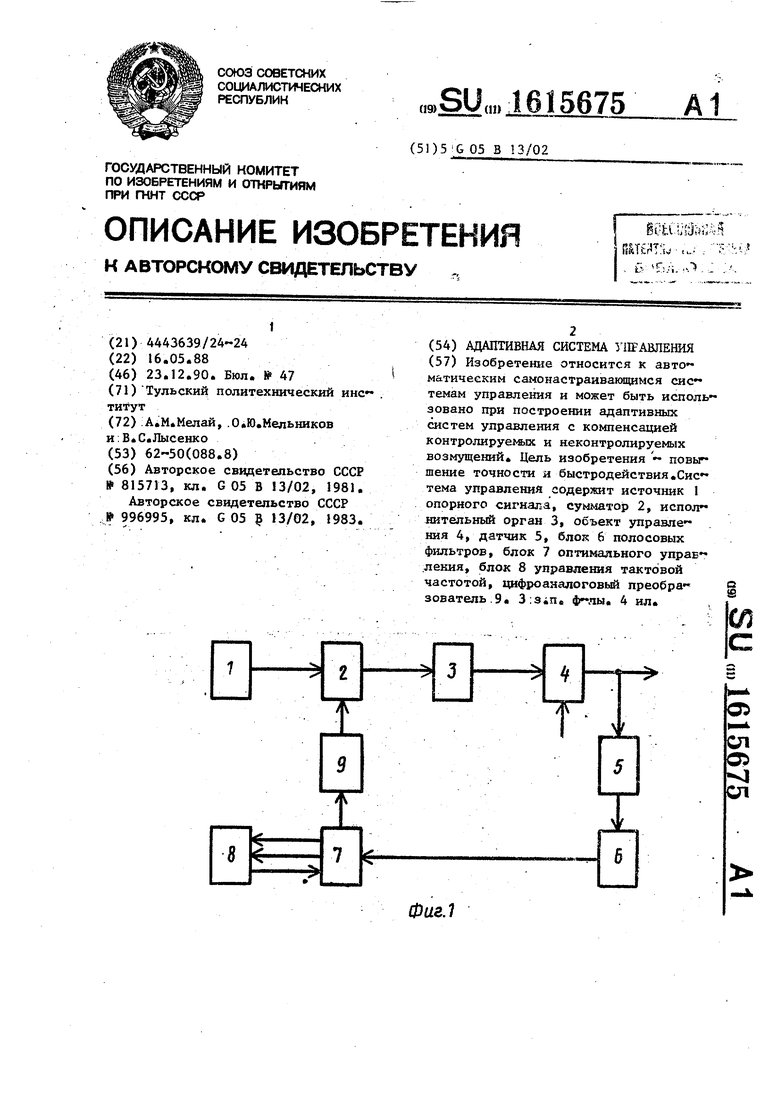
Фиг.1
Изобретение относится к автомати- Ческим самонастраивающимся системам уЬравления и может быть использовано При построении адаптивных систем уп р{авления с компенсацией контроли р уемых и неконтролируемых возмущений I Цель изобретения - повышение тач ности и быстродействия.
На фиг,1 представлена фуикциональ ная схема системы управления; на фиг.2 функциональная схема суббло ка блока оптимального управления; на фиг.З функциональная схема блока управления; на фиг,4 блок коррек ции аппроксиматора.
Система управления содержит ис точник I опорного сигнала, сумматор 2, исполнительный орган 3, объект 4 управления, датчик 5, блок 6 полосовых фильтров, блок 7 оптимального У1равления, блок 8 управления такто взй частотой и цифроаналоговый пре о Зраз ователь:9,
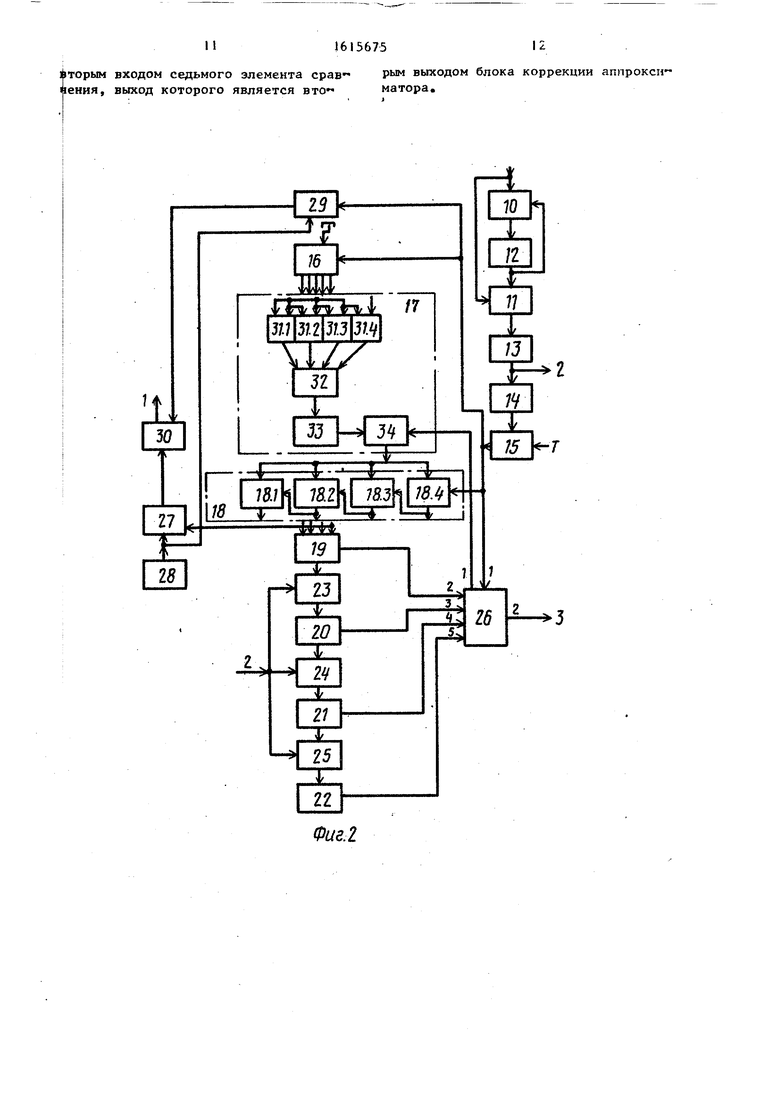
I Субблок блока 7 оптимального уп равления (фиг,2) содержит элементы 1D и 11 сравнения, интегратор 12, усилитель 13, аналого-цифровой преобразователь 14, коммутатор 15, элемент 16 памяти, блок 17 аппроксима- . блок 18 прогнозирования, элементы 19-22 памяти, коммутаторы 23- 2), блок 26 коррекции аппроксиматора блок 27 сравнения, элемент 28 памяти, блок 29 сравнения и элемент 30 3 адержки,
I Блок 17 аппроксимации содержит с| бтракторы 31, сумматор 32, элемент 3 деления, сумматор-субтрактор 34,
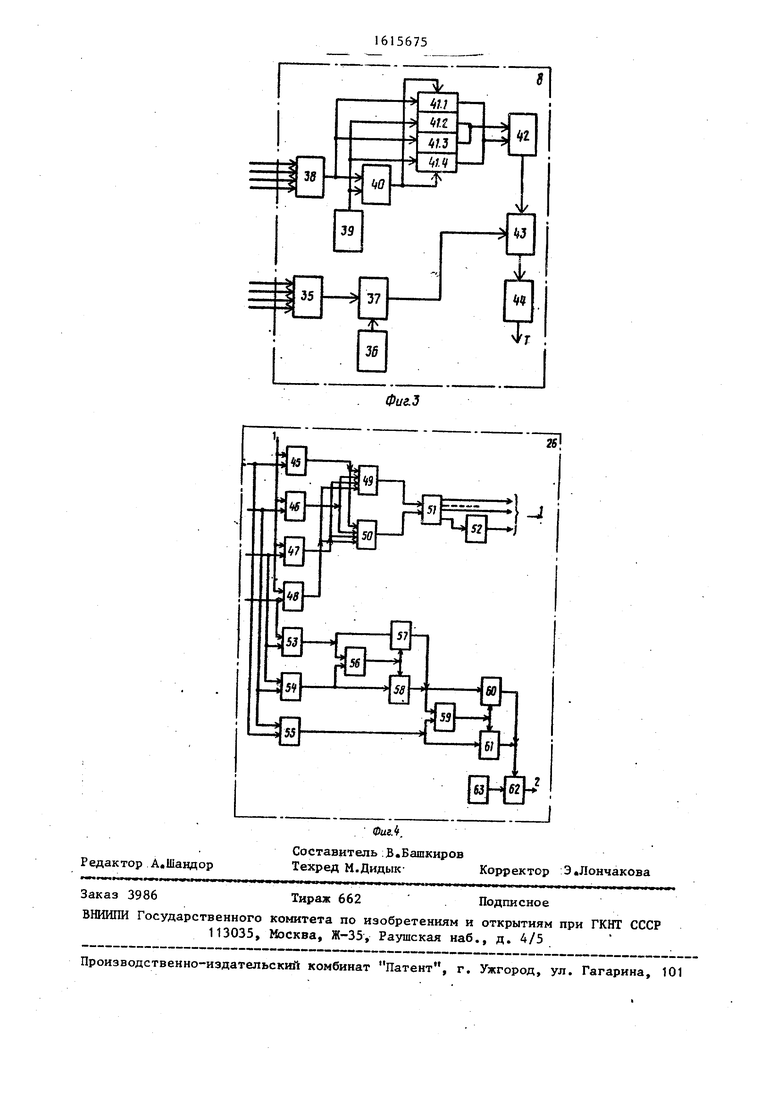
Блок 8 управления тактовой часто- тЬй (фиГ,3) содержит элемент ИЛИ 35, И1рточник 36 опорного напряжения, ком- м гтатор 37, первый сумматор 38, ис- тфчник 39 опорного напряжения, эле- М(Ёнт 40 сравнения, блок 41 коммута- тфров, дифференциальный усилитель 42, сумматор 43 и управляемый ге- нйратор 44 частоты.
Блок 26 коррекции аппроксиматора (фиг,4) содержит элементы 45-48, эле- ме№ты И 49, элементы ИЛИ 50, ревер- счетчик 51, первый элемент 52 памяти, субтракторы 53-55, пятый эле- MciHT 56 сравнения, коммутаторы 57 и 5Й, элемент 59 сравнения коммутаторы 60 и 61, седьмой элемент 62 сравнения и второй элемент 63 памяти.
Система управления работает еле- дующим образом,
0
5
0
5
0
5
0
5
0
5
На объект 4 управления действует входное воздействие Z, задаваемое источником 1 опорного сигнала и передаваемое через сумматор 2 и исполнительный орган 3, и неконтролируемая с неизвестным законом изменения, помеха F, Результатом воздействия величин Z и Р на объект 4 управления является выходная величина Y, которая поступает на вход датчика 5, Преобразованная датчиком 5 информация о величине Y поступает на вход блока 6 полосовых фильтров, разбивающих суммарный сигнал на N спектральных составляющих, количество которых определяется конкретными условиями эксплуатации системы управления, N частотных составляющих с выходов блока
6полосовых фильтров подаются на входы отдельных субблоков : 7,1,,,,.; 7,N, блока 7 оптимального управления,Субблоки ; 7, 1 , i, ,7,N, анализируя характер изменения выходной величины Y, прогнозируют ее поведение на несколько тактов работы схемы вперед, В случае приближения величины Y к одной
из границ поля допуска вырабатывается команда, поступающая на вход блока 8 управления тактовой частотой, который увеличивает тактовую частоту, по- вьшая быстродействие системы управления. Когда спрогнозированное в блоке
7оптимального управления значение величины Y выходит за границу поля допуска, блоком 7 вырабатывается команда, подаваемая в цифроаналоговый преобразователь 9 с таким расчетом, чтобы, учитывая инерционность последующих блоков, корректирующее воздействие дошло до объекта 4 управ- ления к такту, предыдущему такту выхода величины Y за пределы допу-ска. На выходе цифроаналогового преобразователя 9 формируется корректирующая величина X , поступающая на вход сумматора 2, образуя на его выходе сигнал Z Х+ X, который, поступая на вход исполнительного органа 3, образует сигнал Z, поступающий
на вход объекта 4 управления и отводящий величину Y от границы поля дог- пуска.
Сигналы с выходов блока 6 полосовых фильтров поступают на входы блока 7 оптимального управления, В каждом отдельном блоке:7,,,7,N сигнал поступает на элемент 10 сравнения, где из него вычитается выходной
i 1
сигнал интегратора 12 о среднем значении величины входного к блоку 10 сигнала. Выходной сигнал элемента 10 сравнения поступает на вход интегратора 12. От интегратора сигнал .посту пает на вход элемента 11 сравнения, где вычитается из начального сигнала На выходе элемента 11 сравнения получается информация об отклонении сигнала блока 6 от средней величины. Tie. чистый переменный сигнал, В спу чае, если этот субблок блока 7 обрабатывает постоянную составляющую суммарного сигнала элементы 10-12 в нем отсутствуют.
От элемента 11 сигнал поступает в усилитель 13, где приводится к необходимому масштабу. После этого, от- масштабированный сигнал поступает в аналого-цифровой преобразователь 14, одновременно сигналы от усилителей 13 всех субблоков блока 7 оптимального управления поступают в сумматор 38 блока 8, С выхода аналого-цифрового преобразователя 14 сигнал поступает в коммутатор 15, тактируемый от блока 8 управления тактовой частотой От коммутатора 15 информация поступает в элемент 29 сравнения, элемент 16 памяти, блок 18 прогнозирования и блок 26 коррекции аппроксиматора. Элемент памяти запоминает поступившее в него число, одновременно с записанными ранее.
На фиг.2 представлен случай, когда элемент 16 памяти хранит 5 чисел. Работа элемента 6 памяти тактируется сигналами от блока 8 управления тактовой частотой. Числа из элемента 16 памяти поступают в блок 17 аппроксимации, где субтракторы 31.1-31,4, количество которых определяется количеством чисел в элементе 16 памяти, вычисляют разницу между соседними числами, а сумматор 32 элемента 33 деления вычисляет среднее значение разницы в этих числах, Сумматор-суб трактор 34 прибавляет или вычитает из этого среднего значения число, задаваемое блоком 26 коррекции аппро- ксиматора. Это скорректированное среднее значение поступает в блок 18 прогнозирования, где в сумматорах прибавляется несколько раз к изме- ренному текущему значению, поступающему от коммутатора 15, образуя несколько прогнозов на последующие такты (на фиг,2 представлен случай, ког10
5
20
5
6756
да формируются 4 прогноза). Эти v.to гнозы поступают в элемент 19 памяти. Одновременно один из прогнозов (ка кой именно - зависит от инерциомности объекта управления) поступает в элемент 27 сравнения. Из элемента 19 ближaйшIiй прогноз поступает в блок 26 коррекции аппроксиматора.
При поступлении тактового импульса в коммутатор 23 эти прогнозы перейдут в элемент 20 памяти, затем через коммутатор 24 - в элемент 21 памяти, затем в элемент 22 памяти, а предыдуище элементы памяти заполняются новыми прогнозаьп1. Первый прогноз из элемента 19, второй из элемента 20, третий из элемента 21 и четвертый из элемента 22 поступак-т в блок 26 коррекции аппроксиматора. Таким образом, в блок 26 поступают прогнозы, относящиеся к одному и тому же такту,
В блоке 26 коррекции аппроксима- тора (фиг,4) прогнозы поступают в элементы 45-48 сравнения и в субтракторы 53-55, В элементах сравнения прогнозы Сравниваются с измеренным текущим значением, поступающим от коммутатора 5. Результаты сравнения поступают в элементы И 49 и ИЛИ 50, В случаях, если все прогнозы больше или все прогнозы меньше текущего значения, срабатывает оДин из этих блоков, посылая импульс в реверсивный счетчик 5, который прибавляет либо вычитает единицу из чис ла, которое посылается для коррекции в блок 17 аппроксимации. Элемент 52 памяти служит для установки знака этого числа, В субтракторах 53-55 вычисляется разница между прогнозами, Результаты двух вычислений поступают в элемент 56 сравнения, В зависимости от результата сравнения подается сигнал на коммутатор 57 или 58, через который проходит максимальная из двух величин разница между прогнозами.
Аналогично выбирается максимальная величина из результата промежуточного сравнения и результата третьего вычитания субтрактора 55 при помощи элемента 59 сравнения и коммутаторов 60 и 61, Максимальная разница между прогнозами поступает на элемент 62 сравнения, где сравнивается с величиной, записанной в элементе 63 памяти. Если разница в про0
5
0
5
0
5
гнозах превышает эту величину, т.о от элемента 62 сравнения поступает сигнал в элемент ИЛИ 35 блока;8.
Поступивший в элемент 27 сравнения прогноз сравнивается с числом из элемента 28 памяти к, в случае превышения его посылается сигнал в элемен 30 задержки. Туда же подключен выход от элемента 29 сравнения, где орав- нивается число из элемента 28 памяти и измеренное текущее значение от коммутатора 15 В элементе 30 задержки, по поступлении входного импульса, отсчитав количество тактовых импуль- сов, определяемое глубиной прогнозирования и запаздыванием в объекте управления, блок формирует на выходе сигнал управления.
Сигналы от элементов 30 задержки блоков оптимального управления поступают в цифроаналоговый преобразователь 9, на выходе которого формируется сигнал X, поступающий в сумматор 2,
Сигналы, поступившие в сумматор |38 и в элемент ИЛИ 35 (фиг.З) блока |8, служат для управления частотой I следования тактирующих импульсов, ;При попадании одного из входных сиг- Iналов в элемент ИЛИ 35 сигнал с его выхода поступает на вход коммутатора ;37, разрешая прохождение сигнала от |источника 36 опорного напряжения на ;вход сумматора 43, увеличивая напря- жение на входе управляемого генератора 44, и, соответственно, его частоту генерирования.
Напряжения, поступающие на вход сумматора 38, складываются и поступают на вход элемента 40 сравнения и на вход блока 41 коммутаторов, В элементе 40 сравнения это напряжение сравнивается с сигналом от источни- ка 39 опорного напряжения, которьй также поступает на блок 47 коммутаторов. Элемент 40 сравнения в зависимости от соотношения входных величин производит переключение блока 41 коммутаторов так, что при поступлении этих величин на дифференциаль- ньй усилитель 42, на его выходе обра- -уется напряжение, пропорциональное Модулю разности входных к блоку 40 Величин, Это напряжение поступает на, сумматор 43 и далее на управляемый Генератор 44, управляя его частотой Генерирования,
Формула изобретения
1, Адаптивная система управления, содержащая последовательно соединенные сумматор, исполнительный орган, объект управления, датчик, отличающаяся тем, что, с целью повьш1ения точности, введены источник опорного сигнала, блок полосовых фильтров, блок оптимального управления, блок управления тактовой частотой и цифроаналоговый преобразователь, выход источника опорного сигнала соединен с первым входом сумматора, к второму входу которого подключен выход цифроаналогового преобразователя, группа входов которого соединена с группой выходов блока оптимального управления, первая группа информационных входов которого соединена с выходами блока полосовых фильтров, вход которого соединен с выходом датчика, вторая и третья группы информационных выходов блока оптимального управления соединены соответственно с входом разрешения коррекции частоты и информационным входом блока управления тактовой частотой, подключенного выходом к тактовому входу блока оптимального управления ,
:2, Система по;п,1, отличающаяся тем, что блок управления тактовой частотой содержит два цилиндра, два источника опорного напряжения, элемент сравнения, блок коммутаторов, дифференциальный усилитель, коммутатор, 3JieMeHT ИЛИ и управляемый генератор частоты, выход первого сумматора соединен с входом элемента сравнения, а также с первьш и третьим информационными входами блока коммутаторов, подключенного вторым и четвертью информационными входами к выходу первого источника опорного напряжения и второму элемента сравнения, выход которого соединен с управляющим входом блока коммутаторов, подключенного первым и четвертым выходами к первому, а вторым и третьим выходами - к второму входам дифференциального усилителя, выход которого через второй сумматор соединен с входом управляемого генератора частоты, выход элемента ИЛИ подключен к управляющему входу коммутатора, соединенного информационным
9
входом с выходом второго источника опорного напряжения, а выходом с вторым входом второго сумматора, входы первого сумматора и элемента ИЛИ являются соответственно инфор мационным входом и входом разрешени коррекции частоты, а выход управляемого генератора .частоты - выходом блока управления тактовой частотой.
6
,
15675JO
элементов сравнения субблоков образуют группу информационных входов блока оптимального управления, выхо- ды элементов задержки субблоков образуют первую группу информационных выходов блока оптимального управления, выходы усилителей - его вторую группу информационных выходов, а вы- ,0 ходы блоков коррекции аппроксиматора - третью группу информационных выходов.
:4. Система по .п.1, о т л и ч а ю- Щ а я с я тем, что блок коррекции ,5 апцроксиматора содержит семь элементов сравнения, три субтрактора, четыре коммутатора, два элемента памяти, элемент И, элемент ИЛИ, и реверсивный счетчик, первый вход блока 20 коррекции аппроксиматора соединен с первыми входами элементов сравнения с первого по четвертый, вторые входы которых подключены к входам блока коррекции ашфоксиматора со второго 25 по пятьй, а выходы - к входам элемента И и элемента ИЛИ, соединенных выходами с входами реверсивного счетчика, первые входы-субтракторов с первого по третий подключены соот- 30 ветственно к вторым входам элементов сравнения с третьего по первый, выход первого субтрактора соединен с информационным входом первого коммутатора и первым входом пятого элемен- .J2 та сравнения подключенного вторьм входом к выходу второго субтрактора и информационному входу второго коммутатора, а выходом - к управляющим входам первого и второго коммутато- 40 ров, выходы которых соединены с первым входом шестого элемента сравне- .ния и через третий коммутатор - с первым входом седьмого элемента сравнения и выходом четвертого коммута- 45 тора, подключенного информационным входом к выходу третьего субтрактора и второму входу шестого элемента сравнения, выход которого соединен с управляющими входами третьего и чет- 0 вертого коммутаторов, выходы реверсивного счетчика за исключением стар- , шего разряда являются значащими разрядами первого выхода блока коррекции аппроксиматора, старший разряд 5 въгхода реверсивного счетчика через первый элемент памяти подключен к знаковому разряду первого выхода блока коррекции аппроксиматора, выход второго элемента памяти соединен с
Аторым входом седьмого элемента срав РЫ вьоходом блока коррекции аппроксн- яения, выход которого является вто матора.
ю к
Гг
.jaffik
Ф г Чгч/ Ф
ЗПЗ.2
1
I
L I
лз|л
/
г
L/5
Pi/eZ
/5
Редактор А.Шандор
Составитель ;В,Башкиров
Техред М.ДидыкКорректор Э.Лончакова
. ФигЛ.
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР , 996995, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
