(54) ПРОГНОЗИРЬПОЩИЙ РЕГУЛЯТОР
а)в явном виде контролируемые возмущения;
б)ошибки экстраполяции управляющих воздействий и возможность их компенсации на интервале f -{2-3)Т;
в)ошибки реализации .и измерения фактических управляющих воздействий;.
г)изменчивость статистических характеристик идеальных управлений;
д)изменчивость характеристики объекта управления по отношению к контролируемым внешним возмущениям.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигается тем, что в регулятор, содержащий первый экстраполятор, первое звено задержки и - последовательно соединенныепервое звено сравнения, первый фильтр низкой частоты, обратную модель объекта без запаздывания и второе звено сравнения, второй вход котрого соединен с выходом первого звена задержки, введены второй и третий фильтры низкой частоты, вторые экстраполяторы, третьи звенья сравнения первые пропорциональные звенья,вторы звенья задержки, четвертые звенья сравнения, первые блоки адаптации, третьи звенья задержки и последовательно соединенные пятое звено сравнения, второй блок адаптации,второе пропорциональное звено, четвертое звено задержки, шестое звено сравнения, седьмое звено сравнения, инерционное звено, третье пропорциональное звено, первый сумматор, второй сумматор, исполнительный блок, четвертый фильтр низкой частоты и восьмое звено сравнения, выход которого соединен с первым входом одного из третьих звеньев сравнения и через соответствующее третье звено задержки - с первыми входами соответствующих других третьих звеньев сравнения, выход второго ф1лльтра низкой частоты соединен с вторглм входом второго пропорционального звена, второй вход второго- звена сравнения соединен с вторым входом пятого звена сранения, выход шестого звена сравнения через третий фильтр низкой частоты соединен с первыми входами первого и вторых экстраполяторов, выход первого экстраполятора соединен с вторым входом второго сумматора, выходы вторых экстраполяторов через последовательно соединенные соответствующие третье звено сравнения и первое пропорциональное звено соединены с соответствующими входами первого сумматора, выходы первого и вторых экстраполяторов через последовательно соединенные соответствующие второе звено задержки, четвертое звено сравнения и первый блок адаптации соединены с своими вторыми входами, а первые входы - с вторыми входами четвертых звеньев сравнения, выход второго пропорционального звена соединен с третьим входом второго сумматора и вторым входом восьмого звена сравнения, выход четвертого фильтра низкой -частоты соединен с входом первого звена задержки, выход второго звена сравнения соединен с вторым входом, шестого звена сравнения и вторым входом пятого звена сравнения, выход одного из третьих звеньев задержки соединен с вторым входом седьмого звена сравнения.
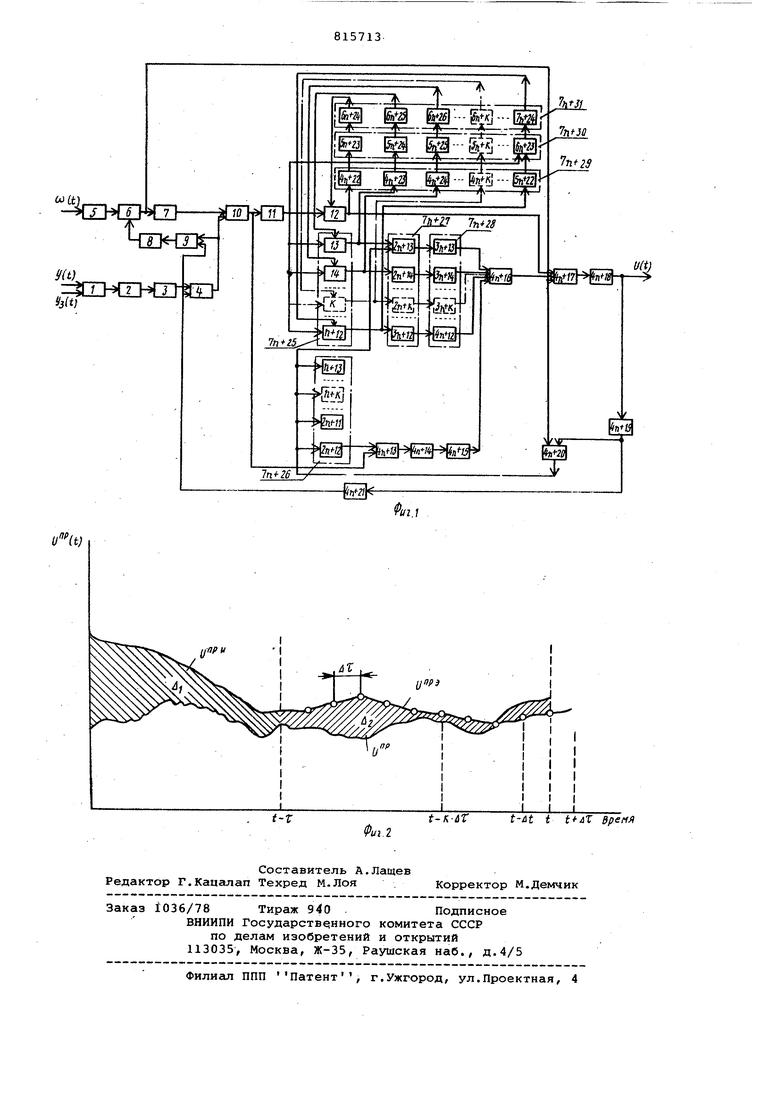
На фиг-. 1 приведена блок-схема предлагаемого регулятора; на фиг.2 кривые реализации приведенных фактических u, идеальных управлений и их экстраполируемых оценок
ПРЭ
Регулятор включает первое звено 1 сравнения, первый фильтр 2 низкой частоты, обратную модель 3 объекта без запаздывания, второе звено 4 сравнения, второй фильтр 5 низкой частоты, второе пропорциональное ззено б,четвертое звено 7 задержки, второй блок 8 адаптации, пятое звено 9- сравнения, шестое звено 10 сравнения, третий фильтр 11 низкой частоты, первый экстраполятор 12, вторые экстраполяторы (7n-f25) ,- содежащие п экстраполяторов от тринадцатого до (п-4-12)-го включительно, где ,третьи звенья (7п+2б) задержки, содержащие п звеньев задержки с шестого по (п+5)-ое, обозначенных от (п+13)-го до (2п+12)-го включительно, третьи звенья {7n-f27) сравнения, содержащие п звеньев сранения от (2п+13)-го до (3.n-fl2)го включительно, первые пропорциональные звенья (7n-f28) , содержащие п пропорциональных звеньев от (Зп+ +13)-го до (4 -fl2)-ro включительно, седьмое -звено (4п+13) сравнения, инерционное звено (4n-fl4), третье пропорциональное звено (4п-И5) , первый сумматор (4п+16), второй сумматор (4П-4-17) , исполнительный блок (4п+18), четвертый фильтр {4п+19) низкой частоты, восьмое звено (4n-f +20) сравнения,первое звено (4п+21) задержки, вторые звенья (7п+29) задержки, содержащие (п+1) звено задержки от (4п+22)-го до (5п+22)го включительно, четвертые звенья (7п+30) сравнения, содержащие (п+1) звено сравнения от (5n+23j-ro до {бп+23)-го включительно, первые блоки (7п+31) адаптации, содержащие (п+1) блок адаптации от (бп+24)-го до (7п+24)-го включительно.
Регулятор работает следующим образом.
Из измеряемого выходного сигнала объекта y(t) в первом.элементе 1 сравнения вычитается заданный сигна Уд(Ъ). Полученный сигнал поступает на первый фильтр 2 низкой частоты.
содержащий, например, последователь но соединенные элемент сравнения, усилитель с насыщением и интегратор, выход которого поступает на второй вход элемента сравнения и является выходом фильтра низкой частоты, в фильтре 2 низкой частоты срезаются отдельные большие выбросы и подавляется высокочастотная составляющая сигнала, что повышает точность дальнейшего преобразования сигнала.
С выхода фильтра 2 низкой частоты сигнал поступает на обратную модель 3 объекта без запаздывания, вsчастности пропорционально-дифференциальное звено. Выходной сигнал обратной модели 3 объекта без запаздывания во втором звене 4 сравнения вычитается из сигнала, поступающего с выхода первого звена ) задержки.Выходной сигнал второго звена 4 сравнения является оценкой идеального управления, найденной с запаздыванием.
.Измеряемый сигнал о внешнем воздействии учитывается следующим обра 3 ом.
Измеряемый сигнал о внешнем воздействии w(t) поступает на второй фильтр 5 низкой частоты, где подавляется высокочастотная составляющая этого сигнала. Полученный сигнал поступает на второе пропорциональное звено 6, где он умножается на Коэффициент и таким образом пересчитывается в масштаб управляющего воздействия U(t). Полученный сигнал идет на четвертое звено 7 задержки, где он запоминается на время Т. Выходной сигнал четвертого звена 7 задержки в шестом звене 10 сравнения вычитается из сигнала, поступающего с выхода второго звена 4 сравнения u(t-t) , в результате чего из оценки идеального управления исключаются эф.фекты измеряемых внешних возмущений (получается приведенное идеальное управление u, (t--t) и сигнал имеет уже более гладкие свойства, что позволяет повысить точность его экстраполяции.
Далее определяется и компенсируется ошибка экстраполяции идеального управления. Полученный в шестом звене 10 сравнения сигнал поступает на третий фильтр. 11 .низкой частоты, в котором этот сигнал усредняется на интервале времени лГ(| 4 )Т. После третьего фильтра 11 низко:-; частоты сигнал идет на входы первого экстраполятора 12 и вторых экстраполяторов (7п+25) содержащих п экстраполяторов, в качестве которых могут использоваться, например, реальные форсирующие звенья. В первом экстраполяторе 12 сигнаш экстраполируется на время СГ +АГ) , в экстраполяторе 13- на время (.Т + At ) , в экстраполяторе 14 - на время (Т - ДГ) , в экстраполяторе к (текущий номер звена)на время СС-КДТ ), в экстраполяторе {п+12) - на время ДТ. Таким образом, сигнал экстраполируется в. виде программы на интервале времени от (t-r ) до () (фиг.2) ,)
ee{;t-t,t-t-ftt) .
в восьмом звене (4п+20) сравнения получается сигнал приведенного фактически реализованного управления U за счет вычитани.я из выходного сиг- , нала четвертого фильтра () ниэJ oй частоты сигнала, поступающего с выхода второго пропорционального звена 6.
Полученный в восьмом звене (4п+ +20) сравнения сигнал поступает на
5 входы третьих звеньев (7n-i-26) задержки, содержащих звенья задержки {п+ + 13),...(и+к); ..., (2П+11), (2П+ +12), где он запоминается на времял1Гв звене (п+13) задержки, кл - в
0 звене (п+к), на время (п-1) - в звене (2П+11) задержкии на время t - в звене (2п+12) .
Из полученного в звено (2п+12) задержки сигнала в седьмом звене
5 (4п+13) сравнения вычитается сигнал, идущий с выхода шестого звена 10 сравнения (t-T) , и, таким образом, получается разность между приведенным фактически реализованным
.. управлением и приведенным, идеальным
управлением. Полученная разность направляется в инерционное звено (4п+ +14),например интегратор, охваченный отрицагельной обратной связью, с помощью которого находится эффект
5 разности меж.ду U и и на интервале от (2-3) I до (t-f ). На фиг.2 эта разность обозначена Л , Сигнал с выхода инерционного звена (4п+14) умножается на весовой
0 коэффициент в третьем пропорциональном звене (4ti+15) и поступает в первое звено суммирования (4м+16).
Далее находится разность между приведенным фактически реализованньлм
f управлением и экстраполированными значениями приведенного идеального управления и на интервале времени от (t-t) до t.
В звене (2п+13) сравнения, являющемся частью третьих звеньев (7п+ +27) сравнения,-выходной сигнал экстраполятора 13 (t) вы 1итается из сигнала восьмого звена (4п+20) сравнения U,(t), в звене (2п+14)
сравнения выходной сигнал экстраполятрра 14 (t-йТГ) вычитается из выходногсэ сигнала звена (п+13) задержки и (t - ДТ), в звене (2п+ +к) сравнения выходной сигнал экстраполятора K. (t-кдТ) вычитается из выходного сигнала звена (п+к) задержки и (t-KAT , в звене (Зп+12) сравнения выходной сигнал экстраполятора (п+12) (i-r-h6t) вычитается из выходного сигнала звена
(2Й-И1) задержки (t-r+-ur«j . в результате находятся разности между приведенными фактически реализованными и экстраполированными значениями приведенного; идеального управления. На фиг.2 эти разности обозначены Д. Каждая из полученных разностей умножается на весовые коэффициенты в первых пропорциональных звеньях (7п+28), содержащих пропорциональные звенья с (Зп+13)-го по (4п+12)-го соответственно, с звена сравнения (2и+13) в пропорциональном звене {Зп+13), звена (2п+14) в пропорциональном звене (Зк1 + 14) , звена {2п+к) в пропорциональном звене (Зп+к) и звена (Зп+12) в пропорциональном звене (4П+12).
Сигналы, полученные в первых пропорциональных звеньях (7п+28), поступают на первое звено (4и+1б) суммирования, в котором определяется сигнал, компенсирующий ошибки экстраполяции управления на интервале.
Во втором звене (4п+17) суммирования суммируются сигналы с выхода второго пропорционального звена б, с выхода первого экстраполятора 12 и с выхода первого звена (4ц+16) суммирования. Полученный во втором звене (41+17) суммирования сигнал является управляющим сигналом, который направляется для реализации в исполнительный блок (4n+l8),
Фактически реализованные в исполнительном блоке (41-1+18) управления измеряются с ошибками. Для подавления высокочастотной составляющей этих ошибок и отдельных больших выбросов поставлен четвертый фильтр (4п+19) низкой частоты, на вход которого поступает сигнал с выхода исполнительного блока (4п+18), а выходной сигнал идет на вход первого звена (4п+21) задержки и первый вход восьмого звена (4п+20) сравнения.
Для учета и компенсации статистических характеристик идеальных управл.ений адаптируются коэффициенты экстраполяторов.
Сигналы с выходов экстраполяторов 12,13,14, ... к, ..., (и+12) поступают на входы вторых звеньев (7п+29) задержки, .содержащих звенья задержки от (4п+ 22)-го до (5п+22)-го. Сигнал с nepfBoro экстраполятора 12 запоминается в (4ц+12) задержки на время {t+Af), сигнал с экстраполятора 13 запоминается в звене (4м+23) задержки на время t f сигнал с экстраполятора 14 запоминается, в звене (4н+24) задержки на время СГ - лТ) , сигнал с экстраполятора к запоминается в звен () задержки на время (1Г-кЛТ) , сигнал с экстраполятора {(1+12) запоминается в звене (5n-f-i2) задержки на время At . с выхода звень ев задержки от (4н+22)-го до (5п+22) го сигналы подаются на первые входы J
четвертых звеньев (7ц+30) сравнения, содержащих звенья сравнения от (5ii+ +23)-го до (6и+23)-го,с (4и+22) на (5К1+23), с (5и+24), (4ц+24) на (5и+ t25) , с (4и+к) на (5ц+к) , с (5и+22) г на {6и+23). В этих звеньях сравнения из сигнала, поступающего с выхода третьего фильтра 11 низкой частоты, вычитаются сигналы, идущие с звеньев (4и+22) , (4м+23) , (4и+24), ..., (4и+к), ... и (5и+22) задержки. Полученные разности поступают на входы первых блоков (7ц+31) адаптации, содержащих блоки адаптации от (6п+24)-го до (7п+24)-го.С звена (5п+ +23) сравнения сигнал поступает на 5 блок (бп+24) адаптации, с звена (5nt24)- на блок (бп+25), с звена (5п+25) - на блок (бц+26), с звена (5п+к) - на блок (бп+к), с звена (би+23) - на блок (7ц+24).
В блоках адаптации реализуется, например, следующая процедура. При условии, что оператор экстраполятора представлен
.7 - 1
- -Тсо р+1 где Тф- интервал экстраполяции;
Тф- постоянная времени форсирующего звена,
то адаптацию Т оэ можно производить по выражению
t . . .J/uu(e)de/-r%au te)de/
Tcb(t) .STco(.B)de-d
)
В1- rrct,(.e)de-5 Tcfc(e)dei
t-Л t-lA
,ПР,„1 .ПРИ, ,ПР5,м
где ).и(в)),
A,B,d - постоянные величины. Сигналы от уточненных в первых блоках (7(1+31) адаптации коэффициентах подаются на экстраполяторы:
0 с блока (бп+24) - на первый экстраполятор 12, с блока (6ц+25) - на экстраполятор 13, с блока (би+2б) на экстраполятор 14, с блока (бп+к)на экстраполятор кис блока (7п+24)5 на экстраполятор(П+12).
Изменчивость характеристики объекта управления по отношению к измеряемым внешним воздействиям учитывается путем оперативной поднаQ стройки (адаптации) пересчетного коэффициента второго пропорционального звена б. Это осуществляется следующим образом.
В пятом звене 9 сравнения из сигнала, поступающего с первого звена
(4h+21) задержки вычитается сигнал, идущий со второго звена 4 сравнения. Полученная в пятом звене 9 сравнения разность идет на второй блок 8 адаптации, в котором реализуется
0 процедура адаптации. Сигнал об уточненном во втором блоке 8 адаптации коэффициенте поступает на второе пропорциональное звено 6.
Использование предлагаемого
5 регулятора позволяет повысить точность воспроизведения задания за счет учета в явном виде контролируемых возмущений, компенсации ошибок экстраполяции управляющих воздействий,ошибок реализации и измерения управляющих воздействий, изменчивости статистических характеристик идеальных управлений и характеристик объекта управления по отношению к контролируемым внешним возмущениям.
Формула изобретения Прогнозирующий регулятор, содержащий первый экстраполятор, первое звено задержки и последовательно соединенные первое звено сравнения, первый фильтр низкой частоты, обратную модель объекта без запаздывания и второе звено сравнения, второй вход которого соединен с выходом первого звена задержки, о т л и ч а ющи и с я тем, что, с целью. повышения точности регулятора, он содержит второй и третий фильтры низкой частоты, вторые экстраполяторы, третьи звенья сравнения, первые пропорциональные звенья, вторые звенья задержки, четвертые звенья сравнения, первые блоки адаптации, третьи звенья задержки и последовательно соединенные пятое звено сравнения, .второй блок адаптации, второе пропорциональное звено, четвертое звено задержки, шестое звено сравнения, седьмое звено сравнения, инерционное звено,третье пропорциональное звено, первый сумматор, второй сумматор, исполнительный блок,четвертый фильтр низкой частоты и восьмое звено сравнения, выход которого соединен с первым входом одного из третьих звеньев сравнения и через соответствующее третье звено задержки - с первыми входами соответствующих других третьих звеньев
сравнения,выход второго фильтра низкой частоты соединен с вторым входом второго пропорционального звена, второй вход второго звена сравнения соединен с вторым входом пятого звена сравнения, выход шестого звена сравнения через третий фильтр низкой частоты соединен с первыми входами первого и вторых экстраполяторов, выход первого экстраполятора соединен с вторым входом
0 второго сумматора, выходы вторых экстраполяторов через последовательно соединенные соответствующие третье звено сравнения и первое пропорциональное звено соединены с соот5ветствующими входами первого сумматора, выходы и вторые входы первого и вторых экстраполяторов соединены через последовательно включенные соответствующие второе звено
0 задержки, четвертое звено сравнения и первый блок адаптации, а первые входы -.с вторыми входами четвертых звеньев сравнения, выход. второго пропорционального звена соединен с третьим входом второго сум-
5 матора и вторым входом восьмого звена сравнения, выход четвертого фильтра низкой частоты соединен с входом первого звена задержки, выход второго звена сравнения соединен с вторым
0 входом шестого звена сравнения и вторым входом пятого звена сравнения , выход соответствующего третьего звена задержки соединен с вторым входом седьмого звена сравнения.
5
Источники информации, принятые во внимание при экспертизе
1.Турецкий X. Анализ и .синтез систем управления с запаздыванием. М., Машиностроение, 1974, с.214.
0
2.Авторское свидетельство СССР по заявке 2631605,кл.С 05 В 13/02, 19.06.78 (прототип).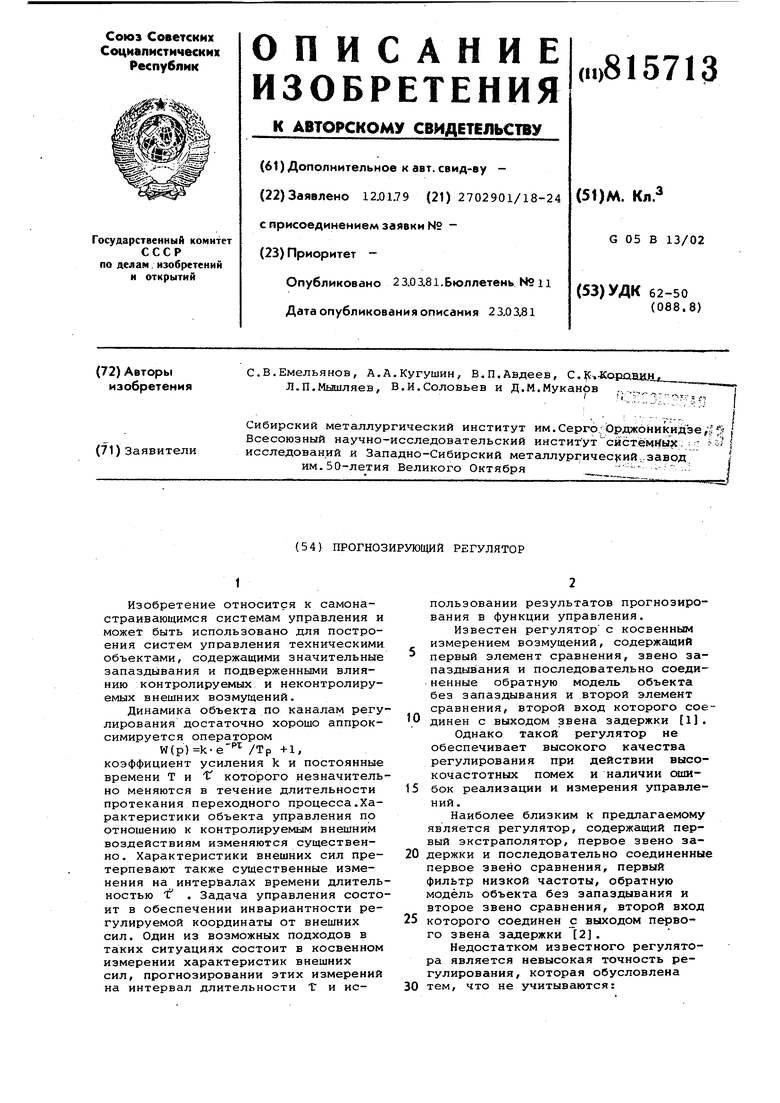

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Регулятор с переменной структурой для объектов с запаздыванием | 1981 |
|
SU1004970A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Регулятор | 1981 |
|
SU945849A1 |
| Регулятор | 1980 |
|
SU903802A1 |