Изобретение относится к робототехнике и может быто использовано при создании приводов роботов.
Цель изобретения - повышение точности и устойчивости устройства за счет более точной компенсации непрерывно изменяющихся параметров нагрузки с учетом динамического запаздывания, вносимого якорной цепью двигателя.
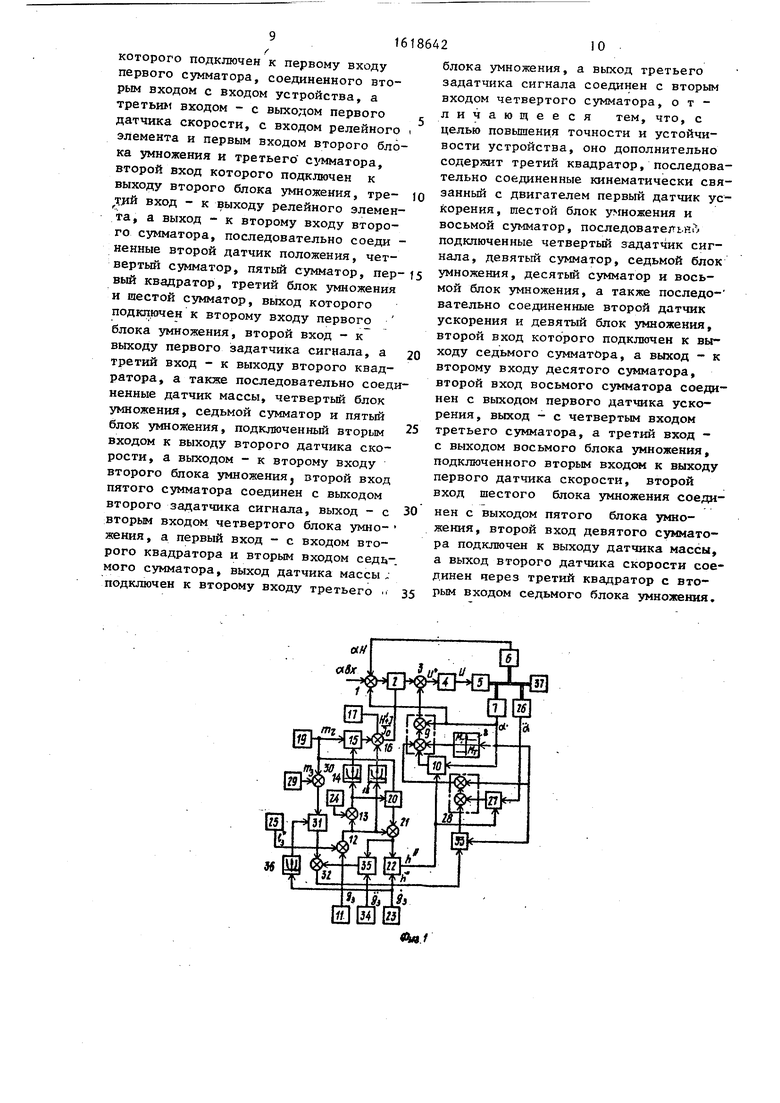
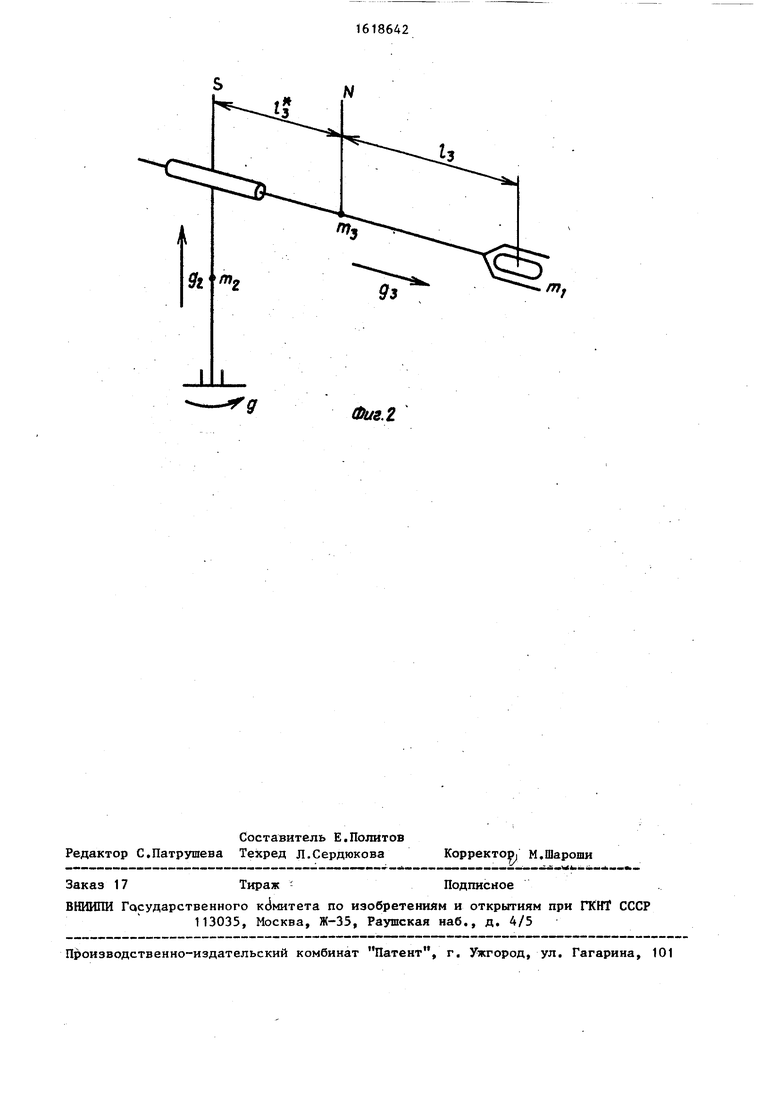
На фиг.1 представлена функциональная схема устройства; на фиг.2 - кинематическая схема исполнительного органа робота.
Схема содержит первый сумматор 1, первый блок 2 умножения, второй сумматор 3, усилитель 4, двигатель 5 с редуктором, первый датчик 6 положения, первий датчик 7 скорости, релейный элемент 8, третий сумматор 9, второй блок 10 умножения, второй датчик 11 положения, четвертый сумматор 12. пятый сумматор 13, первый квадратор 14, третий блок 15 умножения, шестой сумматор 16, первый за-- датчик 17 сигнала, второй квадратор 18. датчик 19 массы, четвертый блок 20 умножения, седьмой сумматор 21, пятый блок 22 умножения, второй датчик 23 скорости, второй задатчик 24 сигнала, третий задатчик 25 сигнала, первый датчик 26 ускорения, шестой блок 27 умножения, восьмой сумматор 28, четвертый задатчик 29 сигнала, девятый сумматор 30, седьмой блок 31 умножения, десятый сумматор 32, восьмой блок 33 умножения, второй датчик 34 ускорения, девятый блок
35 умножения, третий квадратор 36 и объект 37 управления.
На чертежах обозначено: оЈ вх сигнал желаемого положения с задатчика команд, in - передаточное отношение редуктора: g, ofH, g2; g6 - COOTветствующие обобщенные координаты исполнительного органа робота: g, gj - скорость и ускорение изменения третьей обобщенной координаты; m-, т, тf - соответственно массы второг третьего звеньев исполнительного opi« гана и захваченного груза; 1 const - исходное расстояние от оси вращения горизонтального звена до его центра масс при g О 1д const, расстояние от центра масс горизонтального звена до средней точки схвата; ji , $ - скорость и ускорение вращения ротора двигателя; U и U - соответственно усиливаемый сигнал и -сигнал упрг .вления двигателем .
Устройство работает следующим образом.
Сигнал с выхода первого сумматора 1 после коррекции в блоках 2 и 3, .усиливаясь, поступает на электродвигатель 5, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала oi px, моментов трения и моментного водействия Mfc. Электропривод при работ с различными грузами, а также за сче взаимовлияния степеней подвижности исполнительного органа, обладает переменными моментными характеристиками, которые могут меняться в широких пределах Это снижает качествен- ные показатели электропривода и даже приводит к потере устойчивости его работы, В результате возникает задача, связанная с обеспечением инвариантности динамических свойств электропривода к непрерывным и быстрым изменениям его моментных нагрузочных характеристик, что позволяет обеспечить стабильность заданного качества системы управления.
Для определения моментных воздействий на поворотный привод (обобщенных моментов неконсерватив- ных сил) воспользуется уравнением Ланранжа 2-го рода.
Кинетическая энергия Т всех движущихся iMacc исполнительного органа (фиг.2) представляется в виде .7 , 2 , -ч
т Jagi. + . + .i +
(тх+тэ)§| .(тт+ )sj + . - 2 ,
- момент инерции горизонтального звена ( (стержня) при вращении вокруг вертикального звена со скоростью gt;
- момент инерции груза относительно вертикальной оси вращения (вертикального звена). что
ч . .г.
8,+m3 l3+gv 8,+
Шт h+ тз( )2 +
+ (+ 18+ g3) mr)g,+ ( g,) + + mr( I 8,).g,g}, -|1)0,
можно записать, что моментное воздействие на выходной вал привода поворота со стороны движущихся масс исполнительного органа робота и за имеет вид
-
мв н 8э тг + h,)g1, где H(gjmr)m3( g)2 + тг(
+ g,) + IN+ Is;(1)
Г h(g,g,-,mr) (l,+ g) +
+ mr(lj+. Ц+ g,)g,,(2)
где 1 и lu - соответственно моменты инерции вертикального звена исполнительного органа относительно продольной оси и горизонтального звена относительно поперечной оси, проходящей через | его центр масс. С учетом соотношений (1) и (2), а
также уравнений электрической. U
hj + L di/dt + К Ы и механической
iKM (I + H)oi + (KB+ h)(X + Мстр цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, рассматриваемый привод поворота можно описать следующим дифференциальным уравнением:
L( I)L 1) + +L( Н + Кв)Ј+ КМКЮ + + R(h + .Kb) + L( Кв)( +
+ R%+LMcTp (3)
где R и L - соответственно активное сопротивление и индук-/ тивность якорной цепи;
I - момент инерции якоря
двигателя и вращающихся частей редуктора, приведенных к валу двигателя;
Км - коэффициент крутящего момента;
Кф - коэффициент противоЭДС;
Kg - коэффициент вязкого трения;
ip - передаточное отношение редуктора;
М етр момент сухого трения;
К ц - коэффициент усиления усилителя 4;
i - ток якоря;
Н H/i2p; h h/ip2.
Очевидно, что изменение h и Н, вызванное изменением g, и g существенно влияет на динамические свойства, а следовательно, и качественные показатели рассматриваемого привода. .Причем из (3) очевидно, что при большом по модулю h отрицательного значка привод даже может потерять устойчивость, так как появляются положительные корни характеристического уравнения (3).
Поскольку при движении привода / Mctp/ ЗЕ const, (то в выражении (2) полагаем, что LM стр - 0. В процессе эксплуатации привода можне также полагать, что Кв const, a K6 0. Кроме того, из выражений (2) несложно убедиться, что Н h, а выражение для h принимает вид
0
Г 2 Гг ,,- . h ----- газ(1} +
iP L
m,Ut + 85 + mr( 1,+
(4)
h -- Р
-i ...21
+ g3)J ёь+(™ь+ .
Для реализации поставленной задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры привода так, чтобы он описывался дифференциальным уравнением с-постоянны- ми желаемыми параметрами и не зависел бы от переменных H u
И
сил трения.
5 Полагается, что первый отрицательный (со стороны датчика 6) и второй . положительный входы сумматора 1 единичные, а третий отрицательный вход ( со стороны датчика 7) имеет коэф0 Фициент усиления Кц/К„г Положительные входы сумматора 3 единичные. Первый положительный вход сумматора 9 (со стороны релейного элемента 8) имеет коэффициент усиления ,
5 его второй положительный вход (со стороны датчика 7) - коэффициент усиления (KM+ KjR/KM)/Ku третий положительный (со строны блока умножения 10) - коэффициент усиления
0 R/(KU Кп), а четвертый положительный (со стороны сумматора 28) - коэффициент усиления L/(KA,K,j). Причем выходной сигнал релейного элемента 8
35
с нулевой нейтральной точкой имеет вид
М,
Ot О
и
выхеМ Мг при ° О . tf О,
где /Мт/ - величина момента сухого
трения при движении. Первый положительный вход сумматора 28 (со стороны блока умножения 27) имеет коэффициент усиления 2,
его второй положительный вход (со стороны датчика 26) - крэффициент усиления К-, а третий положительный (со стороны блокг 33 умножения) - единичный. Положительные входы сумма
торов 12 и 13 единичные. Задатчик сигнала 24 вырабатывает сигнал 1,, а задатчик 25 - сигнал 1.
Первый и второй положительные входы сумматора 16 (со стороны блока
15 умножения и задатчика 17 сигнала) имеют коэффициенты усиления а третий положительный (со стороны квадратора 18) - коэффициент усиления m3/(lHip)s ГДЈ
IiM - номинальное (желаемое) значение приведенного момента инерции , обеспечивающее приводу поворота за- Данные динамические свойства и качественные показатели. Причем с выхода задатчика сигнала 17 на второй вход сумматора 16 поступает сигнал,
На выходе сумматора 30 формирует- ся сигнал тт+ т3, на выходе блока 31 умножения - сигнал ( , . а на выходе сумматора 22 - сигнал h.
На выходе сумматора 28 формируется сигнал ()(х: + h.&, а на выходе сумматора 9 - сигнал


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающийся электропривод робота | 1990 |
|
SU1798179A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2189306C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2054350C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1996 |
|
RU2115539C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2214327C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2004 |
|
RU2272314C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2162792C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2000 |
|
RU2187426C2 |
Изобретение относится к робототехнике и может быть использовано при создании приводов роботов. Целью изобретения является повышение точности и устойчивости устройства за счет более точной компенсации непрерывно изменяющихся параметров нагрузки. В устройство введены дополнитель- - ные задатчик сигнала, сумматоры, блоки умножения, датчики ускорения и квадратор. 2 ил.
+ I,
Первый и второй положительные входы сумматора 21 (со стороны блока 20 умножения и сумматора 12) соответственно имеют коэффициенты усиления 2/12р и 2 тэ/12р.
Первый и второй положительные входы сумматора 20 единичные, а за- датчик сигнала 29 вырабатывает сигнал, равньй пц.
Первый положительный вход сумматора 32 (со стороны ,блока 31 умножения) имеет коэффициент усиления 2/i2p ,а его второй положительный вход (со стороны блока умножения 35) - единичный.
Таким образом, на выходе сумматора 12 формируется сигнал, равный Ig + ga, а на выходе сумматора 13 - сигнал 1 з + 1.+ g:,. На выходе блока 15 умножения формируется сигнал 14(13+ gg)2 , а на выходе квадратора ,18 - сигнал (Ij+.g3)2. В результате на выходе сумматора 16 появляется сигнал, пропорциональный
mr(l3+lt+g3l2 mjXU+gs)2 I
14
Таким образом, на выходе блока 2 умножения формируется сигнал ;
I
) (е- F-ih/i
к
и
где
е н ошибка привода.
На выходе блока 20 умножения формируется сигнал m/jXlj+lj+gjj) а на выходе сумматора 21 - сигнал
2mfr(l,+ g3) m ttj+g,,)/i$:-. Таким образом, на выходе блока 22 умножения формируется сигнал, равный .
li ()+m3(i3+g5)J gj/ф h/ф h.
-iJ- -h lHt i« i(
i; (,)i + h i.
+ -|- h i
км
Окончательно на выходе сумматора 3 имеем
20
U -b-( К.Ж мк
8;
Г КО ( 1 Ku (1 1„
)+ 5 btiKe)
км к
Lh 1ЛR IM I . J/
Мт
KMKi|JкмкЯ
Н% I с
--- с t
1К
(5)
и
Несложно показать, что, подставив - (5) в (3),
из
имеем
LI
Л
+ RIHo/ + КЙК00( КмКдЈ
f
.При этом полагается, что К М„р Of
Таким образом, уравнение (6) имеет постоянные желаемые параметры, а сам привод обладает постоянными желаемыми динамическими свойствами и качественными показателями при любых законах изменения параметров нагрузки.
Формула изобретения
Устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, кинематически связанный с первым датчиком скорости и первым датчиком положения, выход , „
которого подключен к первому входу первого сумматора, соединенного вторым входом с входом устройства, а третьим входом - с выходом первого датчика скорости, с входом релейного элемента и первым входом второго блока умножения и третьего сумматора, второй вход которого подключен к выходу второго блока умножения, тре- гтяй вход - к выходу релейного элемента, а выход - к второму входу второго сумматора, последовательно соеди - ненные второй датчик положения, четвертый сумматор, пятый сумматор, первый квадратор, третий блок умножения и шестой сумматор, выход которого подключен к второму входу первого блока умножения, второй вход - к выходу первого задатчика сигнала, а третий вход - к выходу второго квадратора, а также последовательно соединенные датчик массы, четвертый блок умножения, седьмой сумматор и пятый блок умножения, подключенный вторым входом к выходу второго датчика скорости, а выходом - к второму входу второго блока умноженияj второй вход пятого сумматора соединен с выходом второго задатчика сигнала, выход - с вторым входом четвертого блока умно- жения, а первый вход - с входом второго квадратора и вторым входом седьмого сумматора, выход датчика массы „ подключен к второму входу третьего
И
блока умножения, а выход третьего задатчика сигнала соединен с вторым входом четвертого сумматора, отличающееся тем, что, с целью повышения точности и устойчивости устройства, оно дополнительно содержит третий квадратор, последовательно соединенные кинематически связанный с двигателем первый датчик ускорения, шестой блок умножения и восьмой сумматор, последовательно подключенные четвертый задатчик сигнала, девятый сумматор, седьмой блок умножения, десятый сумматор и восьмой блок умножения, а также последо- вательно соединенные второй датчик ускорения и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к второму входу десятого сумматора, второй вход восьмого сумматора соединен с выходом первого датчика ускорения, выход - с четвертым входом третьего сумматора, а третий вход - с выходом восьмого блока умножения, подключенного вторым входом к выходу первого датчика скорости, второй вход шестого блока умножения соединен с выходом пятого блока умножения, второй вход девятого сумматора подключен к выходу датчика массы, а выход второго датчика скорости соединен через третий квадратор с вторым входом седьмого блока умножения.
Фиг. 2
| Авторское свидетельство СССР 1484702, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
