Изобретение относится к автоматическому управлению и может быть использовано в электроприводах промышленных манипуляторов.
Известно также устройство для управления приводом робота, содержащее последовательно соединенные блок коррекции, первый блок умножения, первый сумматор, второй блок умножения, первый усилитель и электродвигатель, а также вычислительный блок семь входов которого подключены к семи входам устройства, первый выход - ко второму входу второго блока умножения а второй и третий выходы - соответственно к первому и второму входам первого блока деления, соединенного выходом со вторым входом первого блока умножения. Кроме того оно содержит последовательно соединенные датчик положения и второй сумматор, а также последовательно подключенные третий сумматор, второй блок деления и третий блок умножения, второй вход которого соединен со вторым выходом блока коррекции, а выход - со вторым входом первого сумматора, подключенного
третьим входом к третьему выходу блока коррекции, вход которого соединен с выходом второго сумматора, подключенного вторым входом к восьмому входу устройства. Датчик положения кинематически связан с валом электродвигателя. Второй вход второго блока деления соединен с четвертым выходом вычислительного блока, пятый и шестой выходы которого подключены к первому и второму входам третьего сумматора соответственно.
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению.
Недостатком данного устройства является то, что оно сохраняет достаточно высокую точность работы только для конкретной степени подвижности конкретного типа робота. Для других степеней подвижности других роботов с помощью указанного устройства высокая точность работы обеспечена не будет. В частности для типовых роботов РИМА, ТУР - 10, Гранат - 10 и многих других с однотипной кинематикой для достижения высокого качества (точно w
Ё
Ч|
о ю ю о
сти) управления следует разрабатывать иные устройства управления приводами, которые обеспечивали бы точную компенсацию переменных параметров нагрузки, характерных для манипуляторов указанно- го типа.
Целью изобретения является повышение точности работы приводов манипуляторов типа РИМА, ASEA, ТУР-10, Гранат - 10 и т.д.
Цель достигается тем, что в устройство, содержащее последовательно соединенные блок коррекции, первый блок умножения, первый сумматор, второй блок умножения, первый усилитель и электродвигатель с редуктором, с выходным валом которого кинематически связан первый датчик положения, выход которого соединен со вторым входом второго сумматора, первый вход которого подключен ко входу устройства, а выход - ко входу блока коррекции, последовательно соединенные третий сумматор, первый квадратор, третий блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза, четвертый сумматор, второй и третий входы которого подключены соответственно к выходу первого задатчика постоянного сигнала и второго квадратора, первый блок деления и четвертый блок умножения, второй вход которого подключен ко второму выходу блока коррекции, а выход - ко второму входу первого сумматора, третий вход которого соединен с третьим выходом блока коррекции, последовательно соединенные второй задатчик постоянного сигнала, пятый сумматор, пятый блок умножения, шестой сумматор и шестой блок умножения, второй вход которого подключен к выходу первого датчика скорости, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор и второй усилитель, выход которого соединен со вторым входом второго блока умножения, последо- вательно соединенные восьмой сумматор, первый вход которого подключен к выходу четвертого сумматора и второй блок деления, второй вход которого соединен с выходом седьмого сумматора и вторым входом первого блока деления, а выход - со вторым входом первого блока умножения, а также последовательно соединенные второй датчик положения и девятый сумматор, допол- нительно вводятся последовательно соединенные третий датчик положения, первый функциональный преобразователь и третий квадратор, последовательно соединенные второй функциональный преобразователь, вход которого подключен к
выходу третьего датчика положения и второму входу девятого сумматора, и четвертый квадратор, последовательно соединенные третий функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый функциональный преобразователь и шестой квадратор, причем выходы третьего, четвертого, пятого и шестого квадраторов подключены соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего и четвертого функциональных преобразователей соединены с выходом девятого сумматора, выходы второго и четвертого функциональных преобразователей подключены соответственно к первым и вторым входам третьего и десятого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные четвертый задатчик постоянного сигнала, одиннадцатый сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, седьмой блок умножения, двенадцатый сумматор, второй вход которого подключен к выходу пятого блока умножения, восьмой блок умножения, второй вход которого соединен с выходом второго датчика скорости, и тринадцатый сумматор, второй вход которого подключен к выходу шестого блока умножения, а выход - ко вторым входам седьмого и восьмого сумматоров, последовательно соединенные третий усилитель, вход которого соединен с выходом девятого сумматора, четырнадцатый сумматор, второй вход которого подключен к выходу второго датчика положения, пятый функциональный преобразователь и девятый блок умножения, выход которого подключен к третьему входу двенадцатого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, пятнадцатый сумматор, второй вход которого соединен с выходом датчика массы, десятый блок умножения, второй вход которого подключен к выходу второго функционального преобразователя, и одиннадцатый блок умножения, второй вход которого соединен с выходом третьего функционального преобразователя, а выход - со вторым входом шестого сумматора, последовательно соединенные четвертый усилитель, вход которого подключен к выходу третьего датчика положения, и шестой функциональный преобразователь, выход которого соединен со вторым входом седьмого блока умножения, причем второй вход пятого блока умножения через седьмой функциональный преобразователь подключен к выходу третьего усилителя.
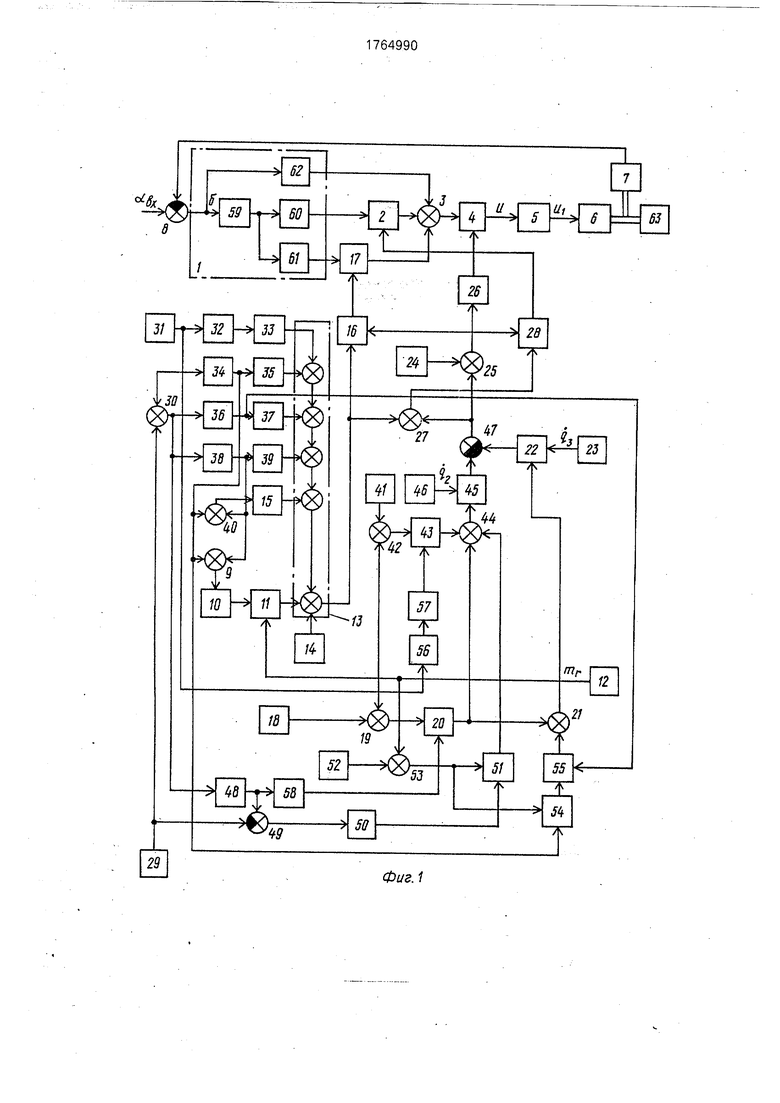
Блок-схема предлагаемого устройства для управления приводом робота представлена на фиг.1.
Устройство для управления приводом робота содержит последовательно соединенные блок 1 коррекции, первый блок 2 умножения, первый сумматор 3, второй блок 4 умножения, первый усилитель 5 и электродвигатель 6 с редуктором, с выходным валом которого кинематически связан первый датчик 7 положения, выход которого соединен со вторым входом второго сумматора 8, первый вход которого подключен ко входу устройства, а выход - ко входу блока 1 коррекции, последовательно соединенные третий сумматор 9, первый квадратор 10, третий блок 11 умножения, второй вход которого соединен с выходом датчика 12 массы захваченного груза, четвертый сумматор 13, второй и третий входы которого подключены соответственно к выходу первого задатчика 14 постоянного сигнала и второго квадратора 15, первый блок 16 деления и четвертый блок 17 умножения, второй вход которого подключен ко второму выходу блока 1 коррекции, а выход - ко второму входу первого сумматора 3, третий вход которого соединен с третьим выходом блока 1 коррекции, последовательно соединенные второй задатчик 18 постоянного сигнала, пятый сумматор 19, пятый блок 20 умножения, шестой сумматор 21 и шестой блок 22 умножения, второй вход которого подключен к выходу первого датчика 23 скорости, последовательно соединенные третий задатчик 24 постоянного сигнала, седьмой сумматор 25 и второй усилитель 26, выход которого соединен со вторым входом второго блока 4 умножения, последовательно соединенные восьмой сумматор 27, первый вход которого подключен к выходу четвертого сумматора 13 и второй блок 28 деления, второй вход которого соединен с выходом седьмого сумматора 25 и вторым входом первого .блока 16 деления, а выход- со вторым входом первого блока умножения 2, а также последовательно соединенные второй датчик 29 положения и девятый сумматор 30. Кроме того оно содержит последовательно соединенные третий датчик 31 положения, первый функциональный преобразователь 32 и третий квадратор 33, последовательно соединенные второй функциональный преобразователь 34, вход которого подключен к выходу третьего датчика 31 положения и второму входу девятого сумматора 30, и четвертый квадратор 35, последовательно соединенные третий функциональный преобразователь 36 и пятый квадратор 37, последовательно соединенные четвертый функциональный преобразователь 38 и шестой квадратор 39, причем выходы третьего 33, четвертого 35, пятого 37 и шестого 39 квадраторов подключены
соответственно к четвертому, пятому, шестому и седьмому входам четвертого сумматора 13, входы третьего 36 и четвертого 38 функциональных преобразователей соединены с выходом девятого сумматора 30, вы0 ходы второго 34 и четвертого 38 функциональных преобразователей подключены соответственно к первым и вторым входам третьего 9 и десятого 40 сумматоров, а выход последнего подключен ко входу вто5 рого квадратора 15, последовательно соединенные четвертый задатчик 41 постоянного сигнала, одиннадцатый сумматор 42, второй вход которого соединен с выходом датчика массы 12 и вторым входом
0 пятого сумматора 19, седьмой блок 43 умножения, двенадцатый сумматор 44, второй вход которого подключен к выходу пятого блока 20 умножения, восьмой блок 45 умножения, второй вход которого соединен с вы5 ходом второго датчика скорости 46, и тринадцатый сумматор 47, второй вход которого подключен к выходу шестого блока 22 умножения, а выход - ко вторым входам седьмого 25 и восьмого 27 сумматоров, по0 следовательно соединенные третий усилитель 48, вход которого соединен с выходом девятого сумматора 30, четырнадцатый сумматор 49, второй вход которого подключен к выходу второго датчика 29 положения, пя5 тый функциональный преобразователь 50 и девятый блок 51 умножения, выход которого подключен к третьему входу двенадцатого сумматора 44, последовательно соединенные пятый задатчик 52 постоянного сигна0 ла, пятнадцатый сумматор 53, второй вход которого соединен с выходом датчика 12 массы, десятый блок 54 умножения, второй вход которого подключен к выходу второго функционального преобразователя 34, и
5 одиннадцатый блок 55 умножения, второй вход которого соединен с выходом третьего функционального преобразователя 36, а выход - со вторым входом шестого сумматора 21, последовательно соединенные четвер0 тый усилитель 56, вход которого подключен к выходу третьего датчика 31 положения, и шестой функциональный преобразователь 57, выход которого соединен со вторым входом седьмого блока 43 умножения, причем
5 второй вход пятого блока 20 умножения через седьмой функциональный преобразователь 58 подключен к выходу третьего усилителя 48. Блок 1 коррекции содержит последовательно соединенные первое инерционное дифференцирующее звено 59
и апериодическое звено 60, а также второе инерционное дифференцирующее звено 61 и апериодическое звено второго порядка 62, Причем входы звеньев 59 и 62 подключены ко входу блока 1 коррекции, вход звена 61 - к выходу звена 59, а выходы звеньев 60, 61 и 62-соответственно к первому, второму и третьему выходам блока 1 коррекции. Объект управления 63.
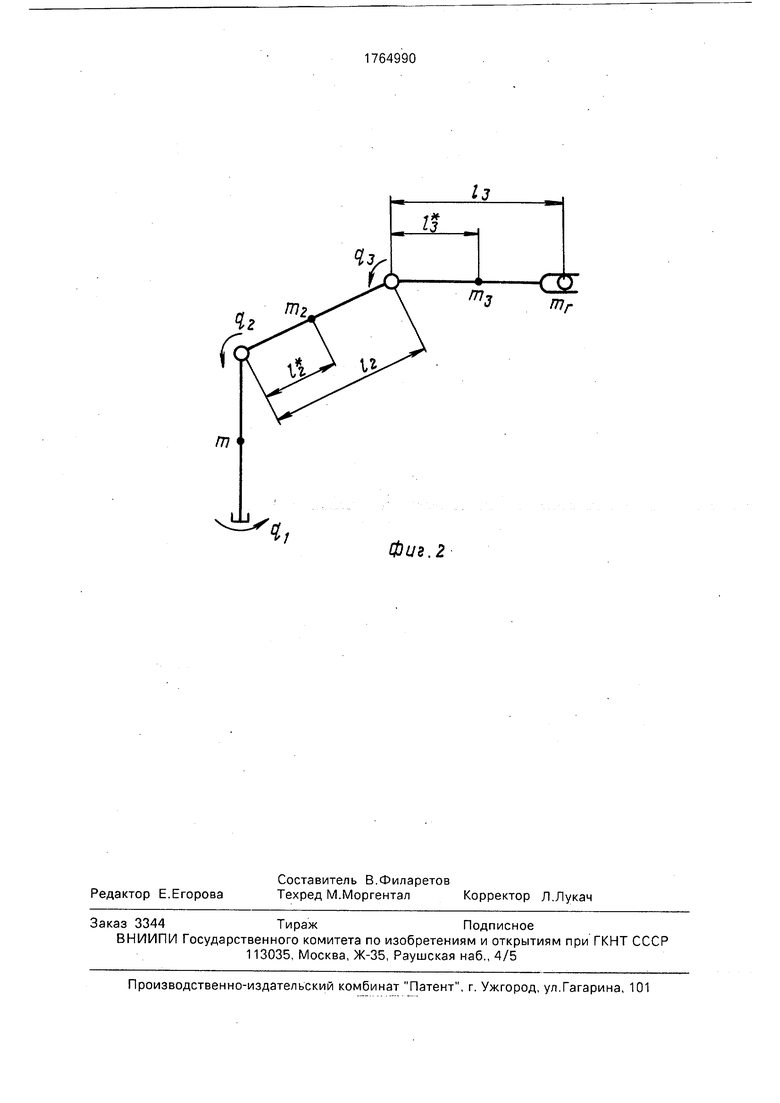
На фиг.2 представлена кинематическая схема робота.
На фиг,1 и 2 введены следующие обозначения:
«ах - сигнал с выхода программного устройства;
б - сигнал ошибки;
U, Ui - соответственно усиливаемый сигнал и сигнал управления двигателем;
qi, Q2, qs обобщенные координаты трех степеней подвижности;
mi, ГП2, тз, тг- массы соответствующих звеньев робота и груза;
2, b - длины соответствующих звеньев;
12, з - расстояния от осей вращения соответствующих звеньев до их центров масс;
6,2 ,0,3 - скорости изменения соответствующих обобщенных координат.
Кроме того, полагается, что
Isi - моменты инерции соответствующих звеньев робота относительно продольных осей (,3),
iNi - моменты инерции соответствующих звеньев робота относительно поперечных осей, проходящих через их центры масс 0 2,3).
Устройство работает следующим образом, На вход подается управляющее воздействие «вх - обеспечивающее требуемый закон управления объектом. На выходе сумматора 8 вырабатывается сигнал ошибки д , который после коррекции в блоках 1, 2, 3, 4 и 17, усиливаясь, поступает на электродвигатель 5 с редуктором. приводя его вал во вращательное движение с направлением и скоростью (ускорение), зависящим от величины поступающего сигнала и внешнего мо- ментного воздействия Мв на привод.
Электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности исполнительного органа, обладает переменными моментны- ми характеристиками, которые могут меняться в широких пределах, это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы. В результате возникает задача, связанная с обеспечением инвариантности динамических свойств электропривода к
изменениям его моментных нагрузочных характеристик, что позволяет обеспечить стабильность заданного качества системы. В изобретении рассматривается устройство для управления приводом робота относительно вертикальной оси исполнительного органа робота, схема которого представлена на фиг.2. Этот привод управляет обобщенной координатой qi.
0 Датчики 31 и 29 установлены соответственно во второй и третьей степенях подвижности робота (см. фиг.2) и измеряют соответственно обобщенные координаты Q2, чз. Сумматор 30 имеет положительные
5 входы с единичными коэффициентами усиления, поэтому на его выходе формируется сигнал Q2 + дз. Усилители 48 и 56 имеют коэффициенты усиления 2. Сумматор 49 имеет единичные коэффициенты усиления,
0 но его второй вход (со стороны датчика 29) отрицательный. Поэтому на выходе сумматора 49 формируется сигнал 2q2+q3. Функциональные преобразователи 32, 36, 50, 57 и 58 реализуют функцию sin, а функциональ5 ные преобразователи34 и 38-функциюcos. В результате на выходе третьего 33, четвертого 35, пятого 37 и шестого 39 квадраторов соответственно формируются сигналы sin q2, cos2q2, Sin2(q2+q3) и cos2(q2+q3).
0 Первый (со стороны функционального преобразователя 34) и второй положительные входы сумматора 40 соответственно имеют коэффициенты усиления 2 и з . В результате на выходе квадратора 15 форми5 руется сигнал lacosqz + 1з cos(q2+qs) . Пер- вый (со стороны функционального преобразователя 34) и второй положительные входы сумматора 9 соответственно имеют коэффициенты усиления 2 и з. В
0 результате на выходе блока умножения 11 формируется сигнал mr I2cosq2 + I3cos(q2+ + q3)2, т.к. датчик 12 измеряет массу захваченного груза тг.
На выходе задатчика 14 постоянного
5 сигнала формируется сигнал lip2 + Isi, где I - момент инерции ротора электродвигателя и вращающихся частей редуктора (приведены к валу двигателя), |р - передаточное отношение редуктора. Первый (со стороны
0 блока 11) и второй (со стороны задатчика 14) положительные входы сумматора 13 имеют соответственно единичные коэффициенты усиления. Его третий (со стороны квадратора 15), четвертый (со стороны квадратора
5 33), пятый (со стороны квадратора 35), шестой (со стороны квадратора 37) и седьмой (со стороны квадратора 39) положительные входы соответственнр имеют коэффициенты усиления тз, Is2, IN2 + m2l2, 1зз и INS. В результате на выходе этого сумматора фор9 176499010
мируется сигнал lip2 + Isi + Is2sin2q2+ (lN2 +Первый (со стороны задатчика 24) и
+ )cos2q2 + Is3sin2(q + дз) + INSCOS (q2 +второй положительные входы сумматора
+ qs) + тз I2cosq2 + з cos (q2 + qa) +25 соответственно имеют единичный коэф+mr I2cosq2 + Iscos (q2 + qs) H (q2, qs) +фициент усиления и коэффициент усиления
+lip .5 R, задатчик 24 формирует сигнал КМК ip2, a
Датчики скорости 46 и 23 устанавлива-усилитель 26 имеет коэффициент усиления
ются соответственно во второй и третьей1/( ), где R-активное сопротивление
степенях подвижности робота (см. фиг.2) иякорной обмотки, а Км и К j- соответственно
измеряют соответственно 6,2 и qa.моментный коэффициент и коэффициент
На выходе задатчика 41 формируется10 противоЭДС электродвигателя. В результа- сигнал + 1ы2 - Is2 + rri2l 2 Первый (соте на выходе сумматора 25 формируется сиг- стороны задатчика41) и второй положитель-нал hR + КмК-jip , а на второй вход блока 4 ные входы сумматора 42 соответственноумножения (состарены усилителя 26) посту- имеют единичный коэффициент усиления ипает сигнал (hR + KMK,Jp )/(KMKjp2). коэффициент усиления, равный 12 . В ре-15 Первый (со стороны сумматора 13) и зультате на выходе блока умножения 43второй положительные входы сумматора формируется сигнал lN2 Is2 + mate +27 соответственно имеют следующие коэф- + (тз + mr) l22 sin2q2.фициенты усиления R и L, где L - индуктивЗадатчик 18 формирует сигнал мз - зз +ноеть якорной обмотки электродвигателя. В
+ , Первый (со стороны задатчика 18) и20 результате на выходе этого сумматора форвторой положительные входы сумматора 19мируется сигнал (Н + lip )R + hL, на выходе
соответственно имеют единичный коэффи-блока 28 деления - сигнал (Н + lip ) R +
циентусиления и коэффициент усиления Is2.+ (hR + ), а на выходе блока 16
В результате на выходе блока 20 умножения деления - сигнал (Н + lip )/(hR + KMKj ip ).
формируется сигнал (INS - I S3 + тз +25 Передаточные функции первого 59 и глг 1з2) sin2 (q2 + qs).второго 61 инерционных дифференцируюЗадатчик 52 постоянного сигнала фор- щих звеньев, а также апериодического зве- мирует сигнал 2Ыз тз. Первый (со стороны на 60 и апериодического звена 62 второго задатчика 52) и второй положительные вхо- порядка соответственно имеют вид
ды сумматора 53 соответственно имеют30 ... ,„ Р... ,„-. PL
/единичный коэффициент усиления и коэф- Л Р + 1 Т2 Р + 1
фициент усиления . В результате на вы-Weo (P)
ходе блока 51 умножения формируется1...
сигнал 212 ( тг1з) sin (2q2 + qs).Т2 Р + 1 62 (Ti Р + 1) (Та Р + 1)
Три положительные входа сумматора 4435
имеют единичные коэффициенты усиления. где Ti и Та - некоторые заранее выбранные Поэтому на выходе блока 45 умножения постоянные времени; р-символ дифферен- формируется сигналцирования.
В результате на выходе блока 2 умножеА Is2 + m2 12 +(тз + тг)х40 ния формируется сигнал х 22 sin2q2 + (IN3 - Isa + +(И f h L
+ тг1з181п2(д2 + рз) + 212(тзГз +гт р
+ тг 1з) sin (2q2 + qa)} q2hR+KMKcoip л
На выходе блока умножения 54 форми-45v к Н 2| J
руется сигнала на выходе блока 17 умножения - сигнал
212( + mrl3)cosq2,Гк +
поэтому с учетом того, что оба положитель- + Р Л
ных входа сумматора 21 имеют единичныйhR+kwkcoip rv
коэффициенты усиления, на выходе блока50 - 0 .
22 умножения формируется сигнал(P+t) Uup+
Поскольку сумматор 3 имеет положиВ (1мз - + + тг 1з ) sin2(q2 +тельные входы с единичными коэффици+ Q3) + 212 ( + тг 1з) cos q2 sin (q2 + qs)q3. ентами усиления, то на выходе этого
55 сумматора формируется сигнал
Оба отрицательных входа сумматора 47lH+Til)L о (HtJil)RfhL
имеют единичные коэффициенты усиления,- р t --p-t-i
поэтому на его выходе формируется сигналHR-t- KMK(j i рKR + рл
h(q2,q3,q2,c,3) A В.СТ,рм) (T2pf {)
11176499012
а на выходе блока 4 умножения - сигнал
hR+KMKio r (Н 3;|1Ь 2+(HtJip)RthL I
КмКсо LHR MKQ;2PP +hR + KMkoaip Р J л
(j-..и,
()(твр + 0
Таким образом, передаточная функция ного между сумматором 8 и усилителем 5, самонастраивающегося последовательного будет иметь вид корректирующего устройства, расположенЫикмКсо Г ()L 2 (M)R+hL ,,} U КмКЮ1р LhR+КмКсо р hR+KttKcpi p Р J ,
Несложно показать, что передаточная фун-магнитами достаточно точно можно описать кция WK(P) обеспечивает инвариантность5 передаточной функцией вида качества работы привода, управляющего координатой qi робота (см. фиг.2), при любом, .. р
законе его движения. KMKcoi p-tRh
Действительно кинетическая энергияnlp)u (Т + щь г, (H-OiplR + hL 7(3)
всех движущихся масс исполнительного ор-10 (hR+KMKcd 2) + HR+ к/Д i2
гана робота представляется в виде мир
Т | {lsi + Is2sin2q2 + lN2COS2q2 +где Ку коэффициент усиления первого
+ Iss sin2 (q2 + qs) + INS cos2 (q2 + qa) +усилителя 5.
-t- m2i22 cos q2 + m3 l2cosq2 + Is cos x 15 С учетом передаточной функции двигах (q2 + рз)2 + mr l2cosq2 + lacos) q2 + рз)2}хтеля (3) и передаточной функции последова. о 1 г, , г, 2 .тельно корректирующего устройства (1)
x qi + N2 + |N3 + m2 i2 + тз (l2 +передаточная функция прямой цепи разо+ + 21а1з cosqs) + mr (l22 + Is2 + 2l2l3мкнутого привода примет вид:
cosqs) q22 + j ю + 2 + тг + 2° W (р) - Wk (P) Wn (P)
ч- Ыз + (1з + I2cosq3) + тг 1з (1з (K.jjp),..
+ h cos qs) P2q3(Т, р + 1)(Т2р + 1) U
а потенциальная энергия имеет вид Из выражения (4) видно, что параметры
П g {гп2 l2 sin q2 + rns l2Sin q2 + з sinx 25 передаточной функции являются постоян- х (q2 + qa) + гпг I2sinq2 + Issin (q2 + qs)}.ными, не зависящими от изменения параУчитывая,чтометров нагрузочных характеристик. Таким
д(Т-П) .. + , sjn2 + CQS2 2 +образом, с помощью сформированного кор5фректирующего устройства (1) удалось осуще+ Iss sin2 (q2 + qs) + INS coszjq2 + qs) + 30 ствить поставленную цель повышения + ma l2 cos2q2 f тз 12С05 q2 + з cos (q2 fточности работы привода в условиях значи+ qs)2 + mr l2cosq2+ Iscos(q2 + qs)2 }q 1,тельного изменения параметров нагрузки.
Практическая реализация предлагаемого устройства не вызывает затруднений, так как в нем используются типовые электрон- + h (q2, qs, q2, qs) qi.НЬ|е элементы, уже испытанные в реальных
условиях эксплуатации.
Из уравнений Лагранка 2 рода неслож-Формула изобретения
но получитьУстройство для управления приводом
(р2, qs)qi+h(q2, рз, Q2,q3)qi. (2) 40 робота, содержащее последовательно сое- С учетом соотношения (2) электропри- диненные блок коррекции, первый блок ум- вод, управляющий координатой qi, на базе ножения, первый сумматор, второй блок электродвигателя постоянного тока незави- умножения, первый усилитель и электро- симого возбуждения или с постоянными
двигатель с редуктором, с выходным валом которого кинематически связан первый датчик положения, выход которого соединен с вторым входом второго сумматора, первый вход которого подключен к входу устройства, а выход - к входу блока коррекции, по- следовательно соединенные третий сумматор, первый квадратор, третий блок умножения, второй вход которого соединен с выходом датчика массы захваченного груза, четвертый сумматор, второй и третий входы которого подключены, соответственно, к выходу первого задатчика постоянного сигнала и второго квадратора, первый блок деления и четвертый блок умножения, второй вход которого подключен к второму выходу блока коррекции, а выход - ко второму входу первого сумматора, третий вход которого соединен с третьим выходом блока кор- рекции, последовательно соединенные второй задатчик постоянного сигнала, пятый сумматор, пятый блок умножения, шестой сумматор и шестой блок умножения, второй вход которого подключен к выходу первого датчика скорости, последовательно соединенные третий задатчик постоянного сигнала, седьмой сумматор и второй усилитель, выход которого соединен со вторым входом второго блока умножения, последовательно соединенные в осьмой сумматор, первый вход которого подключен к выходу четвертого сумматора и второй блок деления, второй вход которого соединен с выходом седьмого сумматора и вторым входом первого блока деления, а выход - со вторым входом первого блока умножения, а также последовательно соединенные второй датчик положения и девятый сумматор, отличающееся тем, что, с целью повышения точности работы, оно дополнительно содержит последовательно соединенные третий датчик положения, первый функциональный преобразователь и третий квадратор, последовательно соединенные второй функциональный преобразователь, вход которого подключен к выходу третьего датчика положения и второму входу девятого сумматора, и четвертый квадратор, по- следовательно соединенные третий функциональный преобразователь и пятый квадратор, последовательно соединенные четвертый функциональный преобразователь и шестой квадратор, причем выходы
третьего, четвертого, пятого и шестого квадраторов подключены, соответственно, к четвертому, пятому, шестому и седьмому входам четвертого сумматора, входы третьего и четвертого функциональных преобразователей соединены с выходом девятого сумматора, выходы второго и четвертого функциональных преобразователей подключены, соответственно, к первым и вторым входам третьего и десятого сумматоров, а выход последнего подключен ко входу второго квадратора, последовательно соединенные четвертый задатчик постоянного сигнала, одиннадцатый
сумматор, второй вход которого соединен с выходом датчика массы и вторым входом пятого сумматора, седьмой блок умножения, двенадцатый сумматор, второй вход которого подключен к выходу пятого блока
умножения, восьмой блок умножения, второй вход которого соединен с выходом второго датчика скорости, и тринадцатый сумматор, второй вход которого подключен к выходу шестого блока умножения, а выход
- ко вторым входам седьмого и восьмого сумматоров, последовательно соединенные третий усилитель, вход которого соединен с выходом девятого сумматора, четырнадцатый сумматор, второй вход которого подключей к выходу второго датчика положения, пятый функциональный преобразователь и девятый блок умножения, выход которого подключен к третьему входу двенадцатого сумматора, последовательно
соединенные пятый задатчик постоянного сигнала, пятнадцатый сумматор, второй вход которого соединен с выходом датчика массы, десятый блок умножения, второй вход которого подключен к выходу второго
функционального преобразователя, и одиннадцатый блок умножения, второй вход которого соединен с выходом третьего функционального Преобразователя, а выход - со вторым входом шестого сумматора, последовательно соединенные четвертый усилитель, вход которого подключен к выходу третьего датчика положения, и шестой функциональный преобразователь, выход которого соединен со вторым входом седьмого
блока умножения, причем второй вход пятого блока умножения через седьмой функциональный преобразователь подключен к выходу третьего усилителя.
Фиг. 2



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2164859C2 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2348509C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2434736C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398672C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2054350C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235015C1 |
Использование: в электроприводах промышленных манипуляторов. Сущность изобретения: в схеме управления приводом робота дополнительно применены новые корректирующие сигналы. 2 ил.
| Самонастраивающийся электропривод | 1987 |
|
SU1545201A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| / | |||
