Изобретение относится к электроизмерительной технике и может быть использовано в измерителях неоднородностей линий, предназначенных для определения мест повреждений в линиях электропередачи и связи.
Целью изобретения является повышение достоверности определения места повреждения за счет устранения влияния затухания импульсов в линии и степени по- врежденности линии для каждого значения временной задержки.
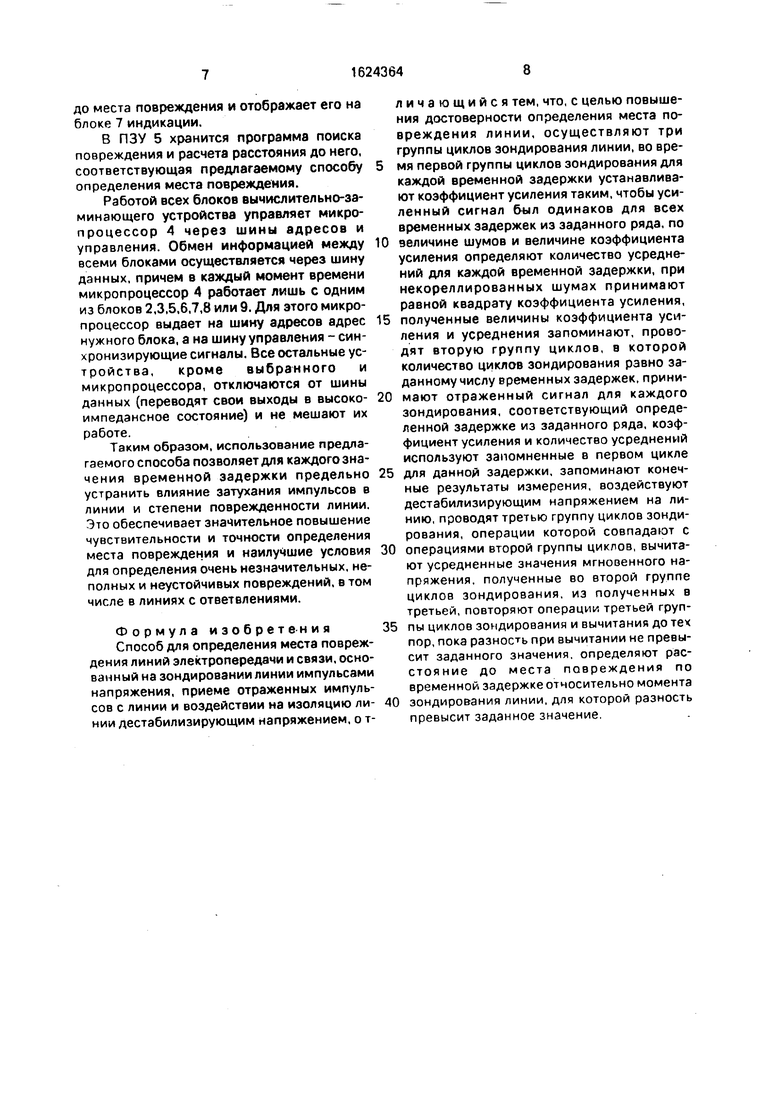
На чертеже изображена структурная схема устройства для реализации предлагаемого способа
Способ основан нэзондировгш и г.инии импульсами напряжения, приеме отраженных сигналов и сравнении их с отраженными сигналами после воздействия д ст билизи- рующего напряжения, причем провод-г первый цикл зондирэвэния тинми, РО время которого для кгждой времен ги чадерж и устанавливают коэ4фициентуг„игсчи 1 та таким чтобы усиленный сшнап бьп одинаковым для всех временных т держе.-. по величине шумов определяют w -шссгвп усреднений для каждой времснчс1, а.ржки, запоминают величины к,оэффип г1 оч усг ления и усреднения
Проводят вторую группу циклов, t) кого рой количество циклов зондир1 --v-я равно
заданному числу временных задержек, принимают отраженный сигнал, для каждого зондирования один, соответствующий определенной задержке из заданного ряда, коэффициент усиления и количество усреднений используются запомненные в первом цикле для данной задержки. Запоминают конечные результаты измерения. Воздействуют дестабилизирующим напряжением на линию. Проводят третью группу циклов зондирования, операции которой совпадают со второй группой циклов. Вычитают усредненные значения мгновенного напряжения, полученные во второй группе циклов зондирования, из полученных в третьей. Повторяют операции третьей группы циклов зондирования и вычитания до тех пор, пока разность при вычитании не превысит заданного значения, Определяют расстояние до места повреждения по временной задержке относительно момента зондирования линии, для которого разность превысит заданное значение.
Коэффициент усиления и количество накоплений, принимаемых с линии сигналов по предлагаемому способу, изменяются в зависимости от амплитуды принимаемых отраженных сигналов. Поэтому такое усиление и накопление целесообразно назвать динамическими.
Динамические усиление и накопление являются эффективными преобразованиями сравниваемых импульсных характеристик (либо мгновенных значений напряжений с линии для каждого значения временной задержки) с точки зрения достижения высокой чувствительности и точности определения места повреждения (ОМП),
Обозначим мгновенные значения напряжений отраженных импульсов для 1-го значения временной задержки до и при воздействии на изоляцию линии дестабилизирующего напряжения соответственно через
Ui(t;)nU2(tO.
Тогда, амплитуда флюктуации отраженного сигнала, полученная после вычитания и измеряемая по способу-прототипу, составит
lMt;) Ui(ti)-U2(ti)(1)
По предлагаемому способу осуществляется динамическое усиление принимаемых с линии сигналов для каждого значения временной задержки в соответствии с выражением
U зонд
ТЩ7
Величина коэффициента динамического усиления K(ti) определяется через амплитуду зондирующего импульса 11эомд. потому
K(t.)
(2)
10
15
20
25
30
35
40
45
50
55
что амплитуда зондирующего импульса при импульсных методах ОМП является своеобразным эталоном - по ней осуществляют калибровку усилителей принимаемых с линии сигналов, по ней производят измерение коэффициентов отражения от мест повреждения и неоднородностей, например в приборах для ОМП Р5-8, Р5-9. Р5-11, Р5-12. Р5-13 (СССР) и SIR-10 (ФРГ), по ней выбирают диапазон допустимых входных сигналов приемной части приборов для ОМП.
Амплитуда флюктуации отраженного сигнала, полученная после вычитания и измеряемая по предлагаемому способу, составляет
(ti) K(ti) Ui(ti) - K(ti) U2(ti) Kft:) Ui{tp- - U2(ti) K(ti) U Ф„ (ti).(3)
Следовательно, в каждой 1-й точке линии будет обнаружена в K(ti) раз меньшая флюктуация отраженного от повреждения сигнала, что свидетельствует об увеличении чувствительности в К (ti) раз.
Для достижения предельно возможного значения чувствительности к повреждениям при использовании эффекта нестабильности их переходного сопротивления необходимо обеспечить идентичные условия сравнения усредненных мгновенных значений напряжений с линии до и при воздействии на нее дестабилизирующего напряжения для каждого значения временной задержки. Это возможно лишь при одинаковых амплитудах шумов для каждого из усредненных мгновенных значений напряжений импульсов.
При динамическом усилении коэффициент усиления выбирается в зависимости от амплитуды напряжении на линии, поэтому усиленные шумы будут иметь различные амплитуды для каждого значения временной задержки.
В соответствии с изложенным можно установить связь между коэффициентом динамического усиления и количеством считываний мгновенных значений напряжений с линии N, необходимых для обеспечения одинаковых амплитуд шумов для каждого значения временной задержки, а именно
К(Ь) (т7У.
Отсюда следует, что для достижения максимально возможного значения чувствительности требуется для каждого значения временной задержки производить динамическое накоплениз, при котором количество считываний каждого мгновенного значения напряжений с линии определяется из выражения
N(t.) №)f(Л)
Схема г.одержит бгок 1 зондирования линии и -фмемэ отраженных сигналов, усилитель 2 г. управляемым усилеьием, блок 3 аналого-цифрового преобразователя (АЦП), микропроцессор 4, блок 5 постоянного запоминающего устройства (ПЗУ), блокбциф- роаналогоаого преобразователя (ЦАП), управляемый источник 7 напряжения, блок
8оперативно запоминающего устройства (ОЗУ), блок 9 индикации, причем вход-выход блока 1 ЗОНДИРОЕ НИЯ линии и приема отраженных импульсов подключен к выходу уп- равпяемого источника напряжения 7 и ктемме исследуемой линии, вход бпока 1 подключен к выходу ЦАП 6 а первый и второй выходы блока i подключены соответственно к четвертому и пятому входам усилителя 2 с управляемым усилением, выход гсотооого подключен к оторому входу АЦП 3 Первый вход усилителя 2 с управляемым усилением подключен к первы -i входам ЦАП 6, АЦП 3, ПЗУ 5 и ОЗУ 8, управляемого источника 7 напряжения и блока 9 индикации и выходу микропроцес- сооз 4 Второй вход усилителя 2 с управляемым усилением подключен к выходам АЦП 3. ПЗУ 5, входам-выходам микропроцессора 4 и ОЗУ 8, вторым входам ЦАП 6, управляемого источника 7 напряжения и блока 9 индикации Третий вход усилителя 2 с управляемым усилением подключен к третьим входам АЦП 3, ПЗУ 5, ЦАП б, управляемого источника 7 нзпряженит, ОЗУ 8, блока
9инци -ац vi и второму выходу микропроцессора 4.
Устройство работает следующим образом
При изменении напряжения на входе.1 блока зондиров-тнич пиний и приема отра- жгньых импупьсоз от нулевого до максимально: о значения оазностное напряжение нг. его первом и втором выходах точно отслеживает (повторяет) мгновенные значения напряжений на линии для каждого значения воеменной задержки, начиная с момента зондировэг ия Это напряжение поступает на входы усилителя 2 с управляемым усилением, коэффициент усиления которого задается цифровым кодом на втором входе, поступающим с микропроцессора 4 по шине данных.
По предлагаемому способу в первом цикг.е первой группы микрспроцессор4 устанавливает коэффициент усиления усилителя 2, равный единице. Затем микропроцессор устанавливает на втором входе ЦАП 6 цифровой код, соответствующий одному из заданных значений временной задержки После этого по команде микропроцессора А запу- о ается АЦП 3, и на его вы/оде устанавливается цифровой код, соответствующей амплитуде мгновенного значения напряжения на линии. Зная этот к од и код, соответствующий амплитуде зондирующего импульса, 5 микропроцессор 4 определяет коэффициент усиления и количество усреднений .необходимые для установленного ЦАП 6 значения временной задержки приема. Полученные значения коэффициента уси0 ления и количества усреднений запоминаются в соответствующих ячейках ОЗУ 8.
Далее код на втором входе ЦАП 6 изменяют и устанавливают таким, чтобы временная задержка момента приема относительно
5 момента зондирования стала равна одному из следующих заданных значений. Все действия повторяют до тех пер, пока в ОЗУ не окажутся заполнаны значения коэффициентов усиления и количества усреднений для
0 каждого из заданных значений временной задержки.
После этого вчполнястся вторяя группа циклов приема, при которой сначала в ЦАП 6 микропроцессор 4 устанавливает код, со5 ответствующий первому из заданных значений временной задержки, а на втором входе усилителя 2 код, соответствующий запомненному для этой задержки коэффициенту усиления Далее микропроцессор осущест0 вляет усреднение в соответствии с запомненным количеством раз и запоминает усредненное значение в соответствующей ячейке ОЗУ 8. Код на втором входе ЦАП 6 микропроцессор изменяет (напоимер, нарз5 щивает) в соответствии с заданными значениями временной задержки и повторяет действия усреднения и запоминания усредненных значений до тех пор. пока в ОЗУ не окажутся запомненными усредненные зна0 чения напряжений с линии, соответствующие всем заданным значениям временной задержки. Затем микропроцессор 4, подавая команду управляемому источнику 7 напряжения, включает его. Тем самым на
5 линию подается дестабилизирующее напряжение.
Далее микропроцессор 4 выполняют третью группу циклов приема и запоминания
0 усредненных значений, после чего вычитает соответствующие по временной задержке запомненные усредненные значения от третьей и второй групп циклов. После вычитания микропроцессор 4 проверяет, превышает ли хотя
5 бы одно из разностных значений заданное значение. Если нет, то все операции группы циклов повторяются. Если да, то по временной задержке, при которой разностное значение превысило заданное значение, микропроцессор 4 определяет расстояние
до места повреждения и отображает его на блоке 7 индикации.
В ПЗУ 5 хранится программа поиска повреждения и расчета расстояния до него, соответствующая предлагаемому способу определения места повреждения.
Работой всех блоков вычислительно-заминающего устройства управляет микропроцессор 4 через шины адресов и управления. Обмен информацией между всеми блоками осуществляется через шину данных, причем в каждый момент времени микропроцессор 4 работает лишь с одним из блоков 2,3,5,6,7,8 или 9. Для этого микропроцессор выдает на шину адресов адрес нужного блока, а на шину управления - синхронизирующие сигналы. Все остальные ус- тройства, кроме выбранного и микропроцессора, отключаются от шины данных (переводят свои выходы в высоко- импедансное состояние) и не мешают их работе.
Таким образом, использование предлагаемого способа позволяет для каждого зна- чения временной задержки предельно устранить влияние затухания импульсов в линии и степени поврежденности линии. Это обеспечивает значительное повышение чувствительности и точности определения места повреждения и наилучшие условия для определения очень незначительных, неполных и неустойчивых повреждений, в том числе в линиях с ответвлениями.
Формула изобретения Способ для определения места повреждения линий электропередачи и связи, основанный на зондировании линии импульсами напряжения, приеме отраженных импульсов с линии и воздействии на изоляцию линии дестабилизирующим напряжением, о тличающийся тем, что, с целью повышения достоверности определения места повреждения линии, осуществляют три группы циклов зондирования линии, во время первой группы циклов зондирования для каждой временной задержки устанавливают коэффициент усиления таким, чтобы усиленный сигнал был одинаков для всех временных задержек из заданного ряда, по
величине шумов и величине коэффициента усиления определяют количество усреднений для каждой временной задержки, при некореллированных шумах принимают равной квадрату коэффициента усиления,
полученные величины коэффициента усиления и усреднения запоминают, проводят вторую группу циклов, в которой количество циклов зондирования равно заданному числу временных задержек, принимают отраженный сигнал для каждого зондирования, соответствующий определенной задержке из заданного ряда, коэффициент усиления и количество усреднений используют запомненные в первом цикле
для данной задержки, запоминают конечные результаты измерения, воздействуют дестабилизирующим напряжением на линию, проводят третью группу циклов зондирования, операции которой совпадают с
операциями второй группы циклов, вычитают усредненные значения мгновенного напряжения, полученные во второй группе циклов зондирования, из полученных в третьей, повторяют операции третьей группы циклов зондирования и вычитания до тех пор, пока разность при вычитании не превысит заданного значения, определяют расстояние до места повреждения по временной задержке относительно момента
зондирования линии, для которой разность превысит заданное значение,
Линия
fa
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения места повреждения линий электропередачи и связи и устройство для его осуществления | 1986 |
|
SU1348756A1 |
| Способ определения места повреждения линий электропередач и связи | 1989 |
|
SU1688205A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его осуществления | 1987 |
|
SU1531037A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его реализации | 1983 |
|
SU1177777A1 |
| Способ определения места повреждения линий электропередач и связи | 1986 |
|
SU1401413A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его осуществления | 1985 |
|
SU1307402A1 |
| Способ определения места повреждений линий электропередач и связи | 1988 |
|
SU1615647A1 |
| Способ определения места повреждения линий электропередач и связи | 1983 |
|
SU1132265A1 |
| Способ определения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1219988A1 |
| Способ определения расстояния до места повреждения линий электропередачи и связи и устройство для его осуществления | 1986 |
|
SU1385108A1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано для определения места повреждения линий электропередачи и связи. Цель изобретения - повышение достоверности определения места повреждения линии. Сущность способа состоит в том, что дважды, до и после воздействия дестабилизирующим напряжением на линию, проводят циклы зондирования ri HI v i iu лми напряжения и принимаю, г-глжммый сш- иал, который усиг. ;вает и ус, лнг , Hd- ходьт разность ме ,./ результатом полученного пол& i Осде дестабилизирующим напряжением ч до воздействия при превчшечии этой разностью заданного значения находят место повреждения по временной задержи для которой разность преяы -,ил зэдг нк значение, причем коэффициент усгле иг гчОира- юттак, ггобы усиленный гиг idn был одинаков для всех временных задержек (при эпмдиро- вании до воздействия до а ипизир -ющим напряжением), з колиместро усреднегий пы- бирают ТЭРим, чтобы велч- ина усредненных шумов была также ОДИМР ПВ дня всех временных задержек. Величина коэффициента усиления и количество . репк иий vc анэв- ливзются во время первой ipyn-u циклов зондирования линии после чего с11 и г-,чины запоминаются. 1 ил. сл С
Вход
Bxl
L Шина упраблзшя
ZjBxE Шина даннь/х
i
Шина оВрегод
К
BxlU Вх 1
8х/Вшад п
v
- 4 f
д/Вшод
5шГ
. /
Яг/И
ЛЛ//1 /Вх
Bxj
Вшх ЪВхЕ
:
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ | 0 |
|
SU185405A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его реализации | 1983 |
|
SU1177777A1 |
