вечного сигнала (КС), период которого соответствует диапазону определяе мых расстояний, при этом осуществляют запоминание первого мгновенного значения напряжения КС при временной задержке, соответствующей началу диа пазона определяемых расстояний, а второго - при временной задержке, со ответствуюшей концу диапазона измеряемых расстояний, сравнивают их между собой, изменяют масштаб временной задержки так, чтобы мгновенные значе1
Изобретение относится к электроизмерительной технике и может быть использовано в импульсных искателях повреждений, например измерителях неоднородностей линии группы Р5.
Целью изобретения является повышение точности определения расстояния до места повреждения линии путем уменьшения погрешности масштаба временной задержки.
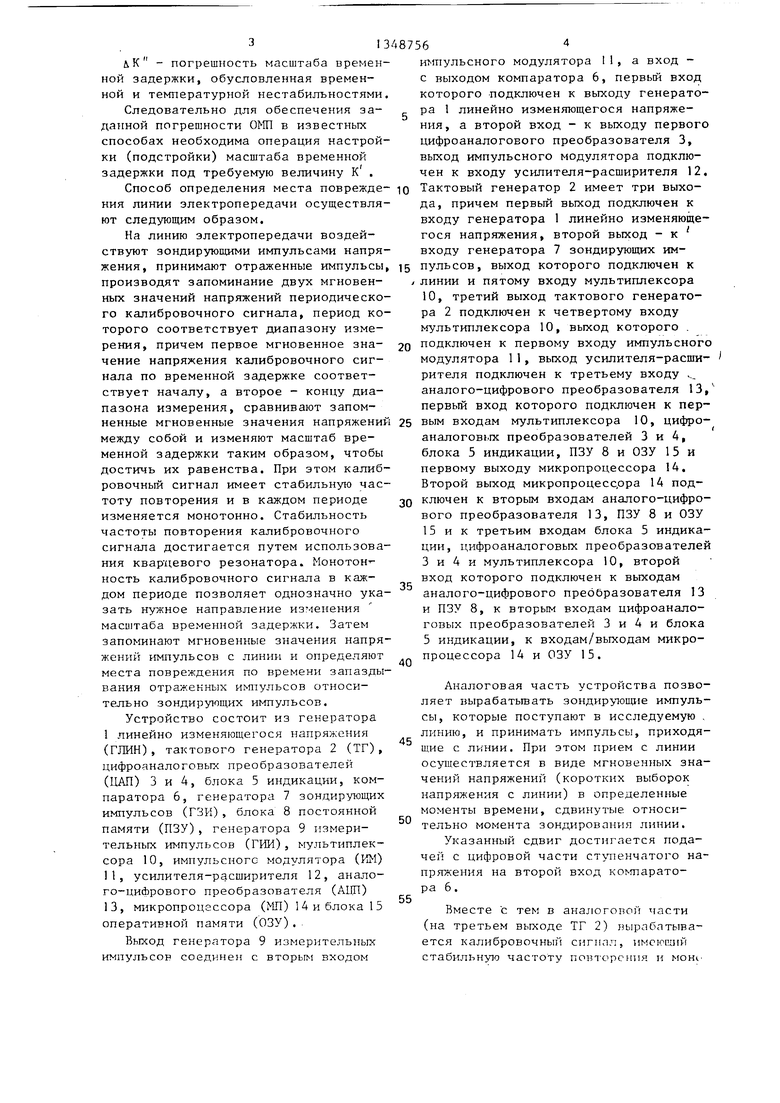
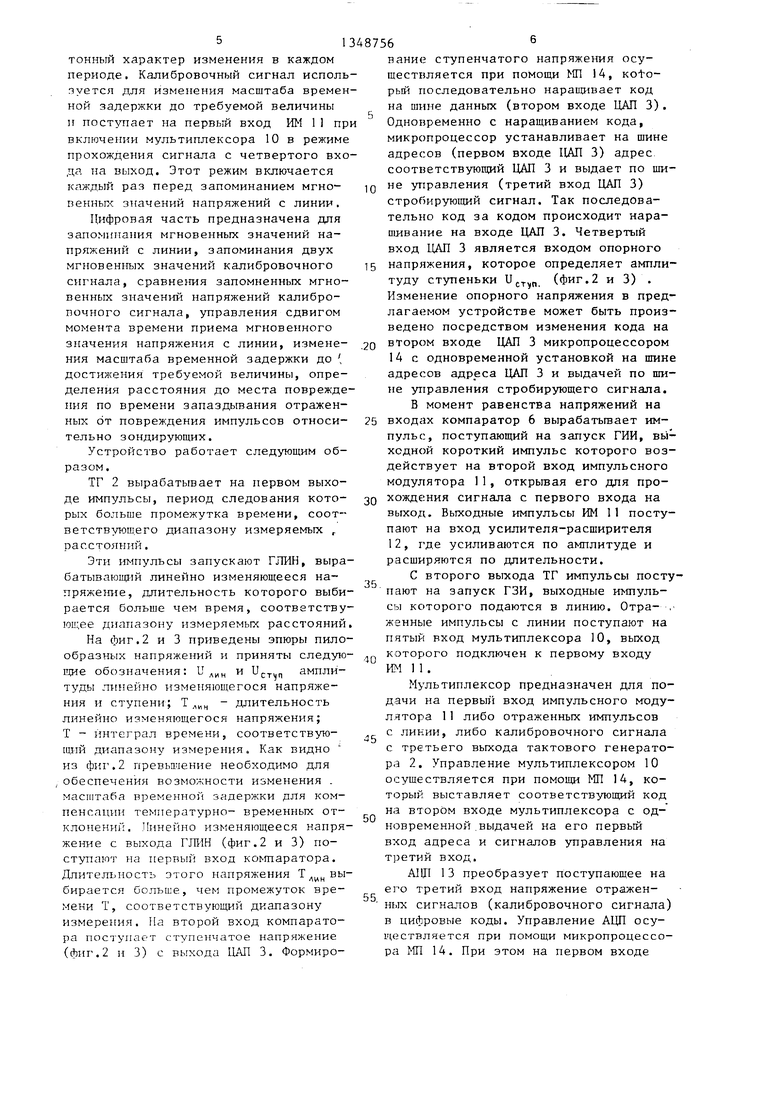
На фиг.1 приведена схема устройства, с помощью которого осуществляют предлагаемый способ; на фиг.2 и 3 - эпюры напряжений.
Измерение расстояния до места повреждения в способах, основанных на зондировании линии импульсами напряжения, осуществляется косвенным путем - по измеренной временной задержке от момента зондирования линии до момента появления отраженного импульса в соответствии с выражением
1.
где lj - расстояние до искомого повреждения;V - скорость распространения
электромагнитных волн (ЭВМ) в линии; с - скорость распространения
ЭВМ в вакууме; - коэффициент укорочения ЭВМ
в линии;
t,v - время задержки отраженного от повреждения иьтульса относительно зондирующего. При выбранном типе изоляции (от которой зависит у) коэффициент
48736
ния напряжений КС при временных задержках, соответствующих началу и . концу диапазона определяемых расстояний, стали равны друг другу, запоминают мгновенные значения напряженных импульсов с линии и определяют расстояние до повреждения по времени запаздывания отраженных импульсов относительно зондирующих. Способ имеет болыпую точность определения места повреждения.2 с.п. ф-лы,1 з.п. ф-лы, 3 ил.
V «
К .. . у
(2)
постоянен, Коэффитщент К определяет масштаб, с помощью которого определяют расстояние до повреждения по изме - ренному значению временной задержки
,4в известных способах определения места повреждения линии (ОМП) считается, что этот коэффициент стабилен как во времени, так и с изменением температуры.
В действительности же имеет место
следующее равенство:
1,
К
V
(3)
20
где К - соответствует величине К с заданной погрешностью ЛК , так что
к К±йК ,
(А)
25
iK обусловлена погрешностью установки масштаба временной задержки.
Однако на практике масштаб временной задержки не остается постоянным и изменяется с течением времени под влиянием температуры, что вызвано невозможностью создания абсолютно термостабильных устройств, старением элементной базы и т.д.
Поэтому погрешность ОМП с течением 35 времени возрастает, а измерение рас- . - стояния производится в соответствии
с выражением
1 I V- . - 1 LJ., где К K i i.K.
(5)
313
дК - погрешность масштаба временной задержки, обусловленная временной и температурной нестабилъностями
Следовательно для обеспечения заданной погрешности ОМП в известных способах необходима операция настройки (подстройки) масштаба временной задержки под требуемую величину К .
Способ определения места повреждения линии электропередачи осуществляют следующим образом.
На линию электропередачи воздействуют зондирующими импульсами напряжения, принимают отраженные импульсы производят запоминание двух мгновенных значений напряжений периодического калибровочного сигнала, период которого соответствует диапазону измерения, причем первое мгновенное значение напряжения калибровочного сигнала по временной задержке соответствует началу, а второе - концу диапазона измерения, сравнивают запомненные мгновенные значения напряжений между собой и изменяют масштаб временной задержки таким образом, чтобы достичь их равенства. При этом калибровочный сигнал имеет стабильную частоту повторения и в каждом периоде изменяется монотонно. Стабильность частоты повторения калибровочного сигнала достигается путем использования квар цевого резонатора. Монотон - ность калибровочного сигнала в каждом периоде позволяет однозначно указать нужное направление изменения масштаба временной задержки. Затем запоминают мгновенные значения напряжений импульсов с линии и определяют места повреждения по времени запаздывания отраженных иштульсов относительно зондирующих импульсов.
Устройство состоит из генератора 1 линейно изменяющегося напряжения (ГЛИН), тактового генератора 2 (ТГ), цифроаналоговьгх преобразователей (ЦАП) 3 и 4, блока 5 индикации, компаратора 6, генератора 7 зондирующих импульсов (ГЗИ), блока 8 постоянной памяти (ПЗУ), генератора 9 измерительных импульсов (ГИИ), мультиплексора 10, импульсного модулятора (ИМ) П, усилителя-расширителя 12, аналого-цифрового преобразователя (АЦП) 13, микропроцессора (МП) 14 и блока 15 оперативной памяти (ОЗУ).
Выход генератора 9 измерительных импульсов соединен с вторым входом
8756
импульсного модулятора II, а вход - с выходом компаратора 6, первый вход которого подключен к выходу генерато- ( ра 1 линейно изменяющегося напряжения, а второй вход - к выходу первого цифроаналогового преобразователя 3, выход импульсного модулятора подключен к входу усилителя-расширителя 12.
0 Тактовый генератор 2 имеет три выхода, причем первый выход подключен к входу генератора 1 линейно изменяющегося напряжения, второй выход - к входу генератора 7 зондирующих им15 пульсов, выход которого подключен к / линии и пятому входу мультиплексора 10, третий выход тактового генератора 2 подключен к четвертому входу мультиплексора 10, выход которого .
Q подключен к первому входу импульсного модулятора 11, выход усилителя-расширителя подключен к третьему входу , аналого-цифрового преобразователя 13, первый вход которого подключен к пер25 вым входам мультиплексора 10, цифро- аналоговых преобразователей 3 и А, блока 5 индикации, ПЗУ 8 и ОЗУ 15 и первому выходу микропроцессора 14. Второй выход микропроцессрра 14 под30 ключен к вторым входам аналого-цифрового преобразователя 13, ПЗУ 8 и ОЗУ 15 и к третьим входам блока 5 индикации, цифроаналоговьгх преобразователей 3 и 4 и мультиплексора 10, второй вход которого подключен к выходам аналого-цифрового преобразователя 13 и ПЗУ 8, к вторым входам цифроанало- говых преобразователей 3 и 4 и блока 5 индикации, к входам/выходам микропроцессора 14 и ОЗУ 15.
35
0
5
0
5
Аналоговая часть устройства позволяет вырабатьгоать зондирующие и туль- сы, которые поступают в исследуемую , линию, и принимать импульсы, приходящие с линии. При этом прием с линии осуществляется в виде мгновенных значений напряжений (коротких выборок напряжения с линии) в определенные моменты времени, сдвинутые относительно момента зондирования линии.
Указанный сдвиг достигается подачей с цифровой части ст Т1енчатого напряжения на второй вход KONmapaTo- ра 6.
Вместе с тем в аналоговой части (на третьем выходе ТГ 2) вырабатывается калибровочный сигнал, имеющий стабильную частоту повторения и MOHIтонный характер изменения в каждом периоде. Калибровочный сигнал используется для изменения масштаба временной задержки до требуемой величины и поступает на первый вход ИМ 11 пр включении мультиплексора 10 в режиме прохождения сигнала с четвертого входа на выход. Этот режим включается каждый раз перед запоминанием мгновенных значений напряжений с линии.
Цифровая часть предназначена для запоминания мгновенных значений напряжений с линии, запоминания двух мгновенных значений калибровочного сигнала, сравнения запомненных мгновенных значений напряжений калибровочного сигнала, управления сдвигом момента времени приема мгновенного значения нанряжения с линии, изменения масштаба временной задержки до , достижения требуемой величины, определения расстояния до места повреждения по времени запаздывания отраженных от повреждения импульсов относительно зондирующих.
Устройство работает следующим образом.
ТГ 2 вырабатывает на первом выходе импульсы, период следования которых больше промежутка времени, соот- ветствуюш.его диапазону измеряемых , расстояний.
Эти импульсы запускают ГЛИН, вырабатывающий линейно изменяющееся на- пряже}ше, длительность которого выбирается больше чем время, соответству- iou;,ee диапазону измеряемых расстояний
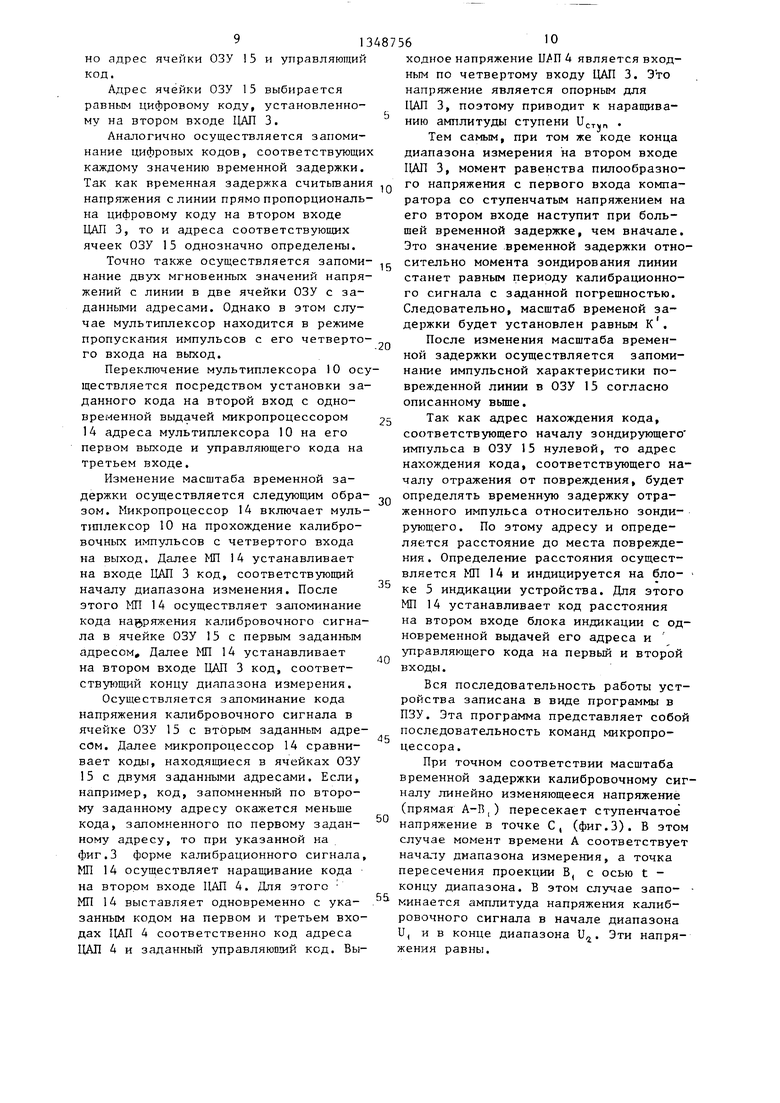
На фиг.2 и 3 приведены эпюры пилообразных напряжений и приняты следующие обозначения: U
и и
амплитуды лине1шо изменяющегося напряжения и ступени; Т - длительность линейно изменяющегося напряжения; Т - интеграл времени, соответствующий диапазону измерения. Как видно из фиг,2 превьичение необходимо для обеспечения возможности изменения . масштаба временной задержки для компенсации температурно- временных отклонений. Линейно изменяющееся напряжение с выхода ГШШ (фиг. 2 и 3) поступают на первый вход кo mapaтopa. Длительность этого напряжения Т выбирается больше, чем промежуток времени Т, соответствующий диапазону измерения. На второй вход компаратора поступает ступенчатое напряжение (фиг.2 и 3) с выхода ЦАП 3. Формиро0
5
0
5
0
5.
0
5
0
5,
вание ступенчатого напряжения осуществляется при поМощи Ш 14, Koto- рый последовательно наращивает код на щине данных (втором входе ЦАП 3). Одновременно с наращиванием кода, микропроцессор устанавливает на щине адресов (первом входе ЦАП 3) адрес соответствующий ЦАП 3 и выдает по щине управления (третий вход ЦАП 3) стробирующий сигнал. Так последовательно код за кодом происходит нара- шивание на входе ЦАП 3. Четвертый вход ЦАП 3 является входом опорного напряжения, которое определяет амплитуду ступеньки (фиг.2 и 3) , Изменение опорного напряжения в предлагаемом устройстве может быть произведено посредством изменения кода на втором входе ЦАП 3 микропроцессором 14 с одновременной установкой на шине адресов ЦАП 3 и выдачей по ши- ire управления стробирующего сигнала.
В момент равенства напряжений на входах компаратор 6 вырабатывает импульс, поступающий на запуск ГИИ, выходной короткий импульс которого воздействует на второй вход импульсного модулятора 11, открьгоая его для прохождения сигнала с первого входа на выход. Выходные импульсы ИМ 11 поступают на вход усилителя-расширителя 12, где усиливаются по амплитуде и расширяются по длительности.
С второго выхода ТГ импульсы поступают на запуск ГЗИ, выходные и туль- сы которого подаются в линию. Отра- , женные импульсы с линии поступают на пятый вход мультиплексора 10, выход которого подключен к первому входу 1 1 .
Мультиплексор предназначен для подачи на первый вход импульсного м оду- лятора 11 либо отраженных импульсов с линии, либо калибровочного сигнала с третьего выхода тактового генератора 2. Управление мультиплексором 10 осуществляется при помощл МП 14, который выставляет соответствуюш 1Й код на втором входе мультиплексора с одновременной .выдачей на его первый вход адреса и сигналов управления на третий вход,
АЦП 13 преобразует поступающее на его третий вход напряжение отраженных сигналов (калибровочного сигнала) в цифровые коды. Управление АЦП осуществляется при помощи микропроцессора МП 14. При этом на первом входе
Л1Щ устанавливается его адрес, а на втором входе сигналы управления. При поступлении сигналов управления АЦП выдает на своем выходе цифровой код, соответствующий входному напряжению. Этот цифровой код поступает через выход/вход в МП 14, после чего следует в ОЗУ 15.
Таким образом, в ОЗУ 15 оказываются записаны либо отраженные сигналы в виде цифровых кодов для каждого значения временной задержки относительно момента зондирования линии, либо калибровочный сигнал в виде двух цифровых кодов. Изменение значения временной задержки осуществляется МП ,14 посредством изменения цифрового кода на втором входе ЦАП 3. Так как значемне временной задержки соответствует расстоянию до точки просмотра линии, то и цифровые коды, устанавливаемые на втором входе ЦАП 3, соответствуют ему. Адрес нахождения цифрового кода, соответствующего напряжению на линии для определенной точки линии, также выбирается равным коду, устанавливаемому на втором входе ЦАП 3. Поэтому всегда известно, в какой ячейке ОЗУ находятся коды напряжений, . соответствующие началу и концу линии.
Зондирующий импульс, а также отраженные импульсы с линии поступают на пятый вход мультиплексора 10. Во время приема импульсов с линии пятый вход мультиплексора 11 подключен к его выходу. nosTONry зондирующий и отраженные импульсы поступают с выхода мультиплексора 11 на первый вход Ш 1 1 .
Следовательно, на первом входе ИМ 11 во время приема присутствует импульсная характеристика линии - рпакция линии на зондирующее воздействие.,
ИМ (11) представляет собой элек- тронную ключевую схему, открьгоание которой осуществляется выходным импульсом ГИИ 9, так как этот импульс достаточно короткий, то из импульсной характеристики линии на выход ИМ I1 поступает лишь очень короткая выборка напряжения в момент времени, соответствующий заданной задержке относительно момента зондирования линии. Изменение указанной задержки осуществляется посредством изменения уровня напряжения на втором входе
компаратора 6, т.е. переходом от одной ступени к другой.
Изменение уровня напряжения на . втором входе компаратора 6 осуществляется за счет изменения цифрового кода на втором входе ЦАП 3. Указанный цифровой код выдается микропроцессором МП 14 с его выхода/входа,
Для того, чтобы указанный код зафиксировался в регистре ЦАП 3, одновременно с ним микропроцессором на шину адресов (первый выход МП и первый вход ЦАП 3) и щину управления (второй выход МП и третий вход ЦАП 3).
выдаются соответственно дворгчный цифровой код адреса ЦАП 3 и код управления .
Тем самым, изменяя двоичный цифровой код на втором входе ИДИ 3 микропроцессор управляет временной задержкой момента выборки напряжения с линии.
Изменяя временную задержку момента выборки от нулевого значения до максимального (соответствующего установленному диапазону измеряемых расстояний) микропроцессор шаг за шагом считывает импульсную характеристику
линии и запоминает двоичные коды, соответствующие мгновенным значениям напряжений импульсов с линии, в ОЗУ.
Запоминание осуществляется следующим образом.
Мгновенная выборка напряжения с . линии в виде короткого импульса, амплитуда которого равна напряжению на линии в момент открывания ИМ, поступает на усилитель-расширитель,
где усиливается по амплитуде, расширяется по длительности до величины, равной времени кодирования АЦП.
45
50
Амплитуда поступающего на третий вход А1Л1 13 импульса преобразуется в цифровой код, который появляется после преобразования на выходе АЦП 13. По сигналам (цифровым входам адреса АЦП 13 и управляющего кода), посту- паюи1им соответственно на первый и второй входы АЦП 13 с МП 14, осуществляется считьшание цифрового кода с выхода АЦП.
Полученный цифровой код помещается микропроцессором 14 в одну из ячеек ОЗУ 15. Дл}1 этого микропроцессор 14 устанавливает указанный код на выход/ /вход ОЗУ 15, а на первый и второй входы ОЗУ 15 выставляет соответстр н55
1348756 О
ходное напряжение ПЛТ U является входным по четвертому входу ЦАП 3. Это напряжение является опорным для НАЛ 3, поэтому приводит к наращиванию амплитуды ступени
Тем самым, при том же коде конца диапазона измерения на втором входе 11ДП 3, момент равенства пилообразного напряжения с первого входа компаратора со ступенчатым напряжением на его втором входе наступит при большей временной задержке, чем вначале. Это значение временной задержки отноТочно также осуществляется запоми- сительно момента зондирования линии
CTaireT равньсм периоду калибрационно- го сигнала с заданной погрешностью.
но адрес ячейки ОЗУ 15 и управляющий код.
Адрес ячейки ОЗУ 15 выбирается равным цифровому коду, установленному на втором входе ЦАП 3.
Аналогично осуществляется запоминание цифровых кодов, соответствующих каждому значению временной задержки. Так как временная задержка считьшания напряжения с линии прямо пропорциональна цифровому коду на втором входе ЦАП 3, то и адреса соответствующих ячеек ОЗУ 15 однозначно определены.
10
нание двух мгновенных значений напряжений с линии в две ячейки ОЗУ с заданными адресами. Однако в этом случае мультиплексор находится в режиме пропускания импульсов с его четвертого входа на выход.
Переключение мультиплексора 10 осуществляется посредством установки заданного кода на второй вход с одновременной выдачей микропроцессором
14адреса мультиплексора 10 на его первом выходе и управляющего кода на третьем входе.
Изменение масштаба временной задержки осуществляется следующим образом. Микропроцессор 14 включает муль- Т1тлексор 10 на прохождение калибровочных импульсов с четвертого входа на выход. Далее МП 14 устанавливает на входе ЦАП 3 код, соответствующий началу диапазона изменения. После этого МП 14 осуществляет запоминание кода на |ряжения калибровочного сигнала в ячейке ОЗУ 15 с первым заданным адресом. Далее МП 14 устанавливает на втором входе ЦАП 3 код, соответствующий концу диапазона измерения.
Осуществляется запоминание кода напряжения калибровочного сигнала в ячейке ОЗУ 15 с вторым заданным адресом. Далее микропроцессор 14 сравнивает коды, находящиеся в ячейках ОЗУ
15с двумя заданными адресами. Если, например, код, запомненный по второму заданному адресу окажется меньше кода, запомненного по первому заданному адресу, то при указанной на фиг.З форме калибрационного сигнала, МП 14 осуществляет наращивание кода на втором входе ЦАП 4. Для этого
.20
25
30
35
40
45
50
5&
Следовательно, масштаб временой задержки будет установлен равным к .
После изменения масштаба временной задержки осуществляется запоминание импульсной характеристики поврежденной линии в ОЗУ 15 согласно описанному вьш1е.
Так как адрес нахождения кода, соответствующего началу зондирующего имггульса в ОЗУ 15 нулевой, то адрес нахождения кода, соответствующего началу отражения от повреждения, будет определять временную задержку отраженного импульса относительно зондирующего. По этому адресу и определяется расстояние до места повреждения . Определение расстояния осуществляется МП 14 и индицируется на бло- ке 5 индикации устройства. Для этого МП 14 устанавливает код расстояния на втором входе блока индикации с одновременной выдачей его адреса и управляющего кода на первый и второй входы.
Вся последовательность работы устройства записана в виде программы в ПЗУ. Эта программа представляет собой последовательность команд микропроцессора.
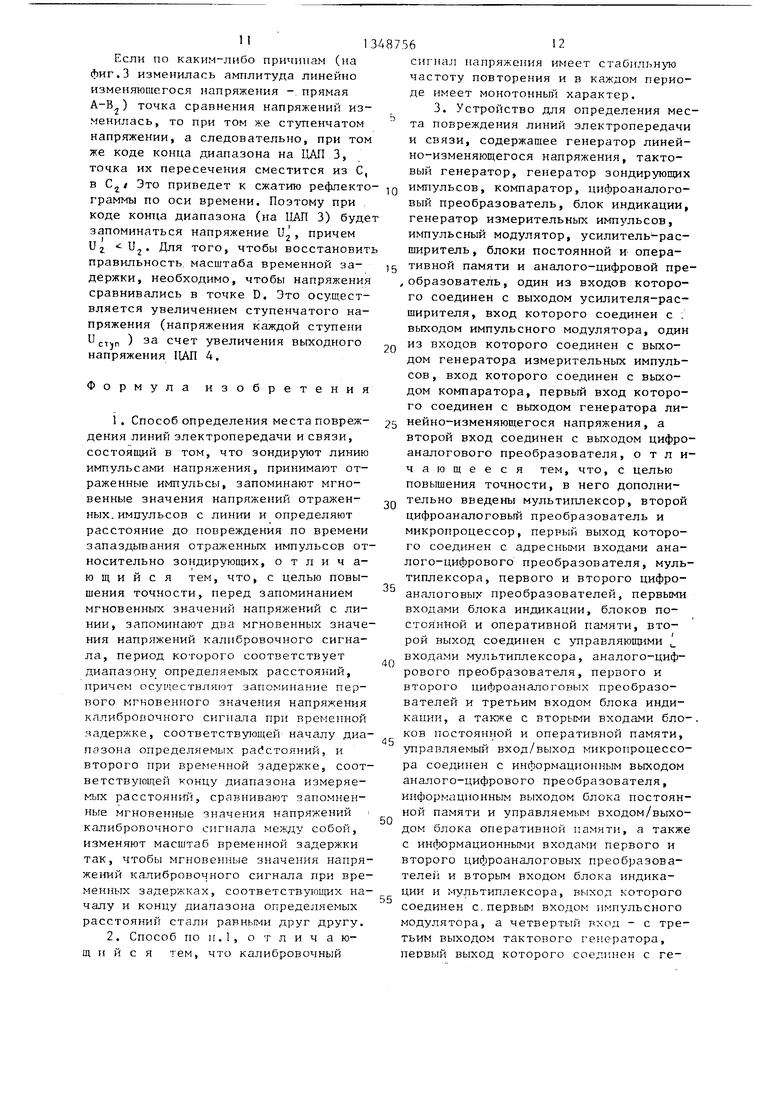
При точном соответствии масштаба временной задержки калибровочному сигналу линейно изменяющееся напряжение (прямая А-ВI) пересекает ступенчатое напряжение в точке С, (фиг.З). В этом случае момент времени А соответствует началу диапазона измерения, а точка пересечения проекции В, с осью t - концу диапазона. В этом случае запо- минается амплитуда напряжения калибровочного сигнала в начале диапазона
МП 14 выставляет одновременно с указанным кодом на первом и третьем входах ЦАП 4 соответственно код адреса ЦАЛ 4 и заданный управляющий код. Вы0
25
30
5
0
5
0
&
Следовательно, масштаб временой задержки будет установлен равным к .
После изменения масштаба временной задержки осуществляется запоминание импульсной характеристики поврежденной линии в ОЗУ 15 согласно описанному вьш1е.
Так как адрес нахождения кода, соответствующего началу зондирующего имггульса в ОЗУ 15 нулевой, то адрес нахождения кода, соответствующего началу отражения от повреждения, будет определять временную задержку отраженного импульса относительно зондирующего. По этому адресу и определяется расстояние до места повреждения . Определение расстояния осуществляется МП 14 и индицируется на бло- ке 5 индикации устройства. Для этого МП 14 устанавливает код расстояния на втором входе блока индикации с одновременной выдачей его адреса и управляющего кода на первый и второй входы.
Вся последовательность работы устройства записана в виде программы в ПЗУ. Эта программа представляет собой последовательность команд микропроцессора.
При точном соответствии масштаба временной задержки калибровочному сигналу линейно изменяющееся напряжение (прямая А-ВI) пересекает ступенчатое напряжение в точке С, (фиг.З). В этом случае момент времени А соответствует началу диапазона измерения, а точка пересечения проекции В, с осью t - концу диапазона. В этом случае запо- минается амплитуда напряжения калибровочного сигнала в начале диапазона
и,
и
в конце диапазона U. Эти напряжения равны.
II
Если по каким-либо причинам (на Лиг.З изменилась амплитуда линейно изменяюшегося напряжения - прямая A-B,j) точка сравнения напряжений изменилась, то при том же ступенчатом напряжении, а следовательно, при том же коде конца диапазона на ЦАП 3, точка их пересечения сместится из С, в Cj/ Это приведет к сжатию рефлекто- граммы по оси времени. Поэтому при коде конца диапазона (на ШШ 3) будет
34
запоминаться напряжение U, причем и2 Д- того, чтобы восстановит правильность масштаба временной задержки, необходимо, чтобы напряжения сравнивались в точке D, Это осуществляется увеличением ступенчатого напряжения (напряжения каждой ступени и ) за счет увеличения выходного напряжения ЦАП 4.
Формула изобретения
i . Способ определения места повреждения линий электропередачи и связи, состоящий в том, что зондируют линию импульсами напряжения, принимают отраженные импульсы, запоминают мгновенные значения напряжении отраженных, импульсов с линии и определяют расстояние до повреждения по времени запаздывания отраженных импульсов относительно зондируюащх, отличающийся тем, что, с целью повышения точности, перед запоминанием мгновенных значений напряжений с линии, запоминают два мгновенных значения напряжений калибровочного сигнала, период которого соответствует диапазону определяемых расстояний, причем осу 1 ествляют запоминание первого мгновенного значения напряжения калибровочного сигнала при временной яадержке, соответствующей началу диапазона определяемых расстояний, и второго при временной задержке, соответствующей концу диапазона измеряе- мьгх расстояний, сравнивают запомненные мгновенные значения напряжений калибровочного сигнала между собой, изменяют масщтаб временной задержки так, чтобы мгновенные значения напряжений калибровочного сигнала при временных задержках, соответствующих началу и концу диапазона определяемых расстояний стали равными друг другу. 2. Способ по п.1, о т л и ч а ю- щ и и с я тем, что калибровочный
ь
10
15
20
25
4875612
сигнал напряжения имеет стабильную частоту повторения и в каждом периоде имеет монотонньш характер.
3. Устройство для определения места повреждения линий электропередачи и связи, содержащее генератор линейно-изменяющегося напряжения, тактовый генератор, генератор зондирующих импульсов, компаратор, цифроаналого- вый преобразователь, блок индикации, генератор измерительных импульсов, и myльcный модулятор, усилитель-расширитель , блоки постоянной и оперативной памяти и аналого-цифровой преобразователь, один из входов которого соединен с выходом усилителя-расширителя, вход которого соединен с : выходом импульсного модулятора, один из входов которого соединен с выходом генератора измерительных импульсов , вход которого соединен с выходом компаратора, первый вход которого соединен с выходом генератора линейно-изменяющегося напряжения, а второй вход соединен с выходом цифро- аналогового преобразователя, отличающееся тем, что, с целью повышения точности, в него дополнительно введены мультиплексор, второй цифроаналоговый преобразователь и микропроцессор, первый выход которого соединен с адресными входами аналого-цифрового преобразователя, мультиплексора, первого и второго цифро- аналоговых преобразователей, первыми входами блока индикации, блоков по- стоя нной и оперативной памяти, второй выход соединен с управляюш11ми входами мультиплексора, аналого-цифрового преобразователя, первого и второго цифроаналоговых преобразователей и третьим входом блока индикации, а также с вторыми входами бло-. ков постоянной и оперативной памяти, управляемый вход/выход микропроцессора соединен с информационным выходом аналого-цифрового преобразователя, информационным выходом блока постоянной памяти и управляемым входом/выходом блока оперативной памяти, а также с информационными входами первого и второго цифроаналоговых преобразователей и вторым входом блока индикации и мультиплексора, выход которого соединен с.первым входом импульсного модулятора, а четвертый вход - с третьим выходом тактового генератора, первый выход которого соединен с ге30
35
40
45
50
55
нератором линейно-изменяющегося напряжения, а второй выход - с входом генератора зондирующих импульсов, выЛинейно -изменяю- щееся напряжение
li
TjlUH.
ход которого соединен с объектом контроля и пятым входом мультиплексора.
Ступенчатое напря)кение
Г
Jлuн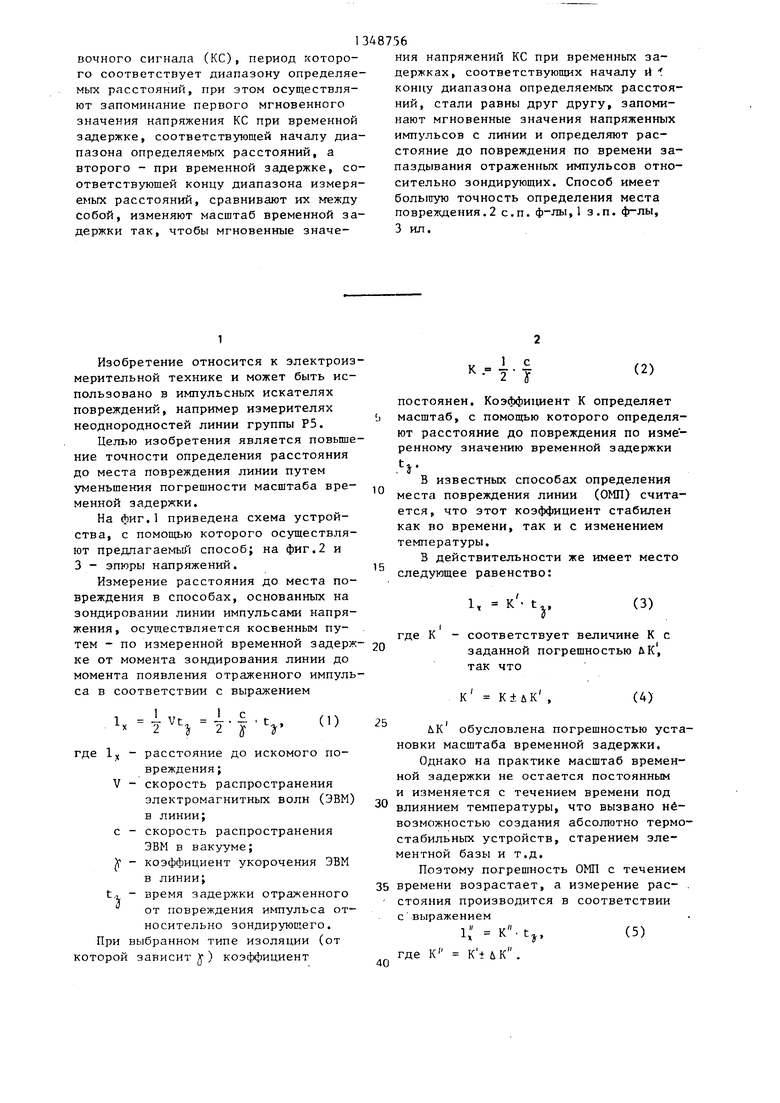
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ для определения места повреждения линий электропередачи и связи | 1986 |
|
SU1624364A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его реализации | 1983 |
|
SU1177777A1 |
| Способ определения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1219988A1 |
| Способ определения места повреждения линий электропередачи и связи и устройство для его осуществления | 1985 |
|
SU1307402A1 |
| Способ определения места повреждения линий электропередач и связи | 1989 |
|
SU1688205A1 |
| Устройство для измерения расстояния до места повреждения проводов и кабелей | 1982 |
|
SU1081571A1 |
| Устройство для измерения расстояния до места повреждения в линиях электропередачи и связи | 1988 |
|
SU1597799A1 |
| Способ определения места повреждений линий электропередач и связи | 1988 |
|
SU1615647A1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1247793A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
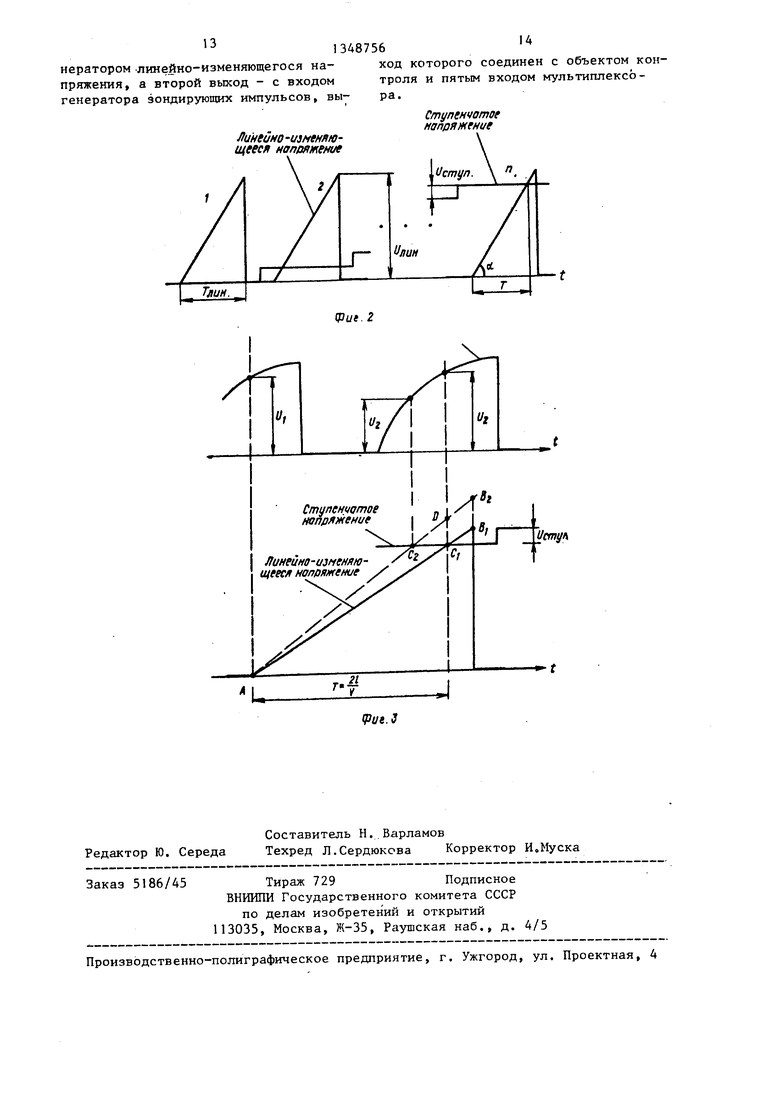
Способ определения места повреждения линий электропередачи и связи реализован в устройстве, содержащем генератор (Г) I линейно изменяющегося напряжения, тактовый Г 2, цифро- , аналоговые преобразователи 3, 4, блок (R) 5 индикации, компаратор 6, Г 7 зондирующих импульсов, Б 8 постоянной памяти, Г 9 измерительных импульсов, мультиплексор 10, импульсный модулятор I1, усилитель-расширитель 12, аналого-цифровой преобразователь 13, микропроцессор 14 и 1Б 15 оперативной памяти. Для определения места повреждения зондируют линию импульсами напряжения, принимают отраженные импульсы, запоминают два мгновенных значения напряжений калибро ТЗж1 ду7 Вх.2 (Л ЖЛШМШч т I I г 1 f о /4 00 4: 00 СП 05 5 Фиг. /
1/сгпуи
Редактор Ю. Середа
Составитель Н.,Варламов
Техред Л.Сердюкова Корректор И.Муска
5186/45
Тираж 729Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ определения места повреждения линий электропередачи и связи и устройство для его реализации | 1983 |
|
SU1177777A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
