Изобретение относится к измерительной технике, в частности к геодезии, и может быть использовано для сборки и контроля поверхностей, работающих при отсутствии силы тяжести,, а также в строительстве при сборке и контроле произвольно ориентированных плоскостей.
Целью изобретения является повы- шенце точности измерений.
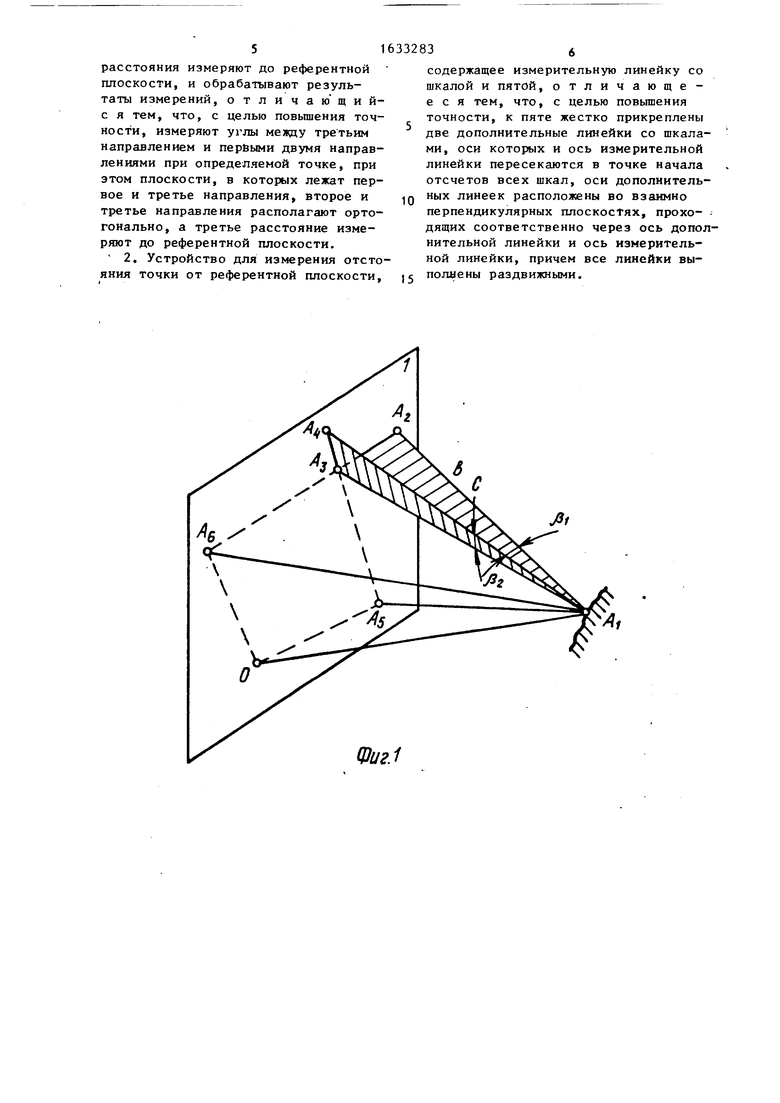
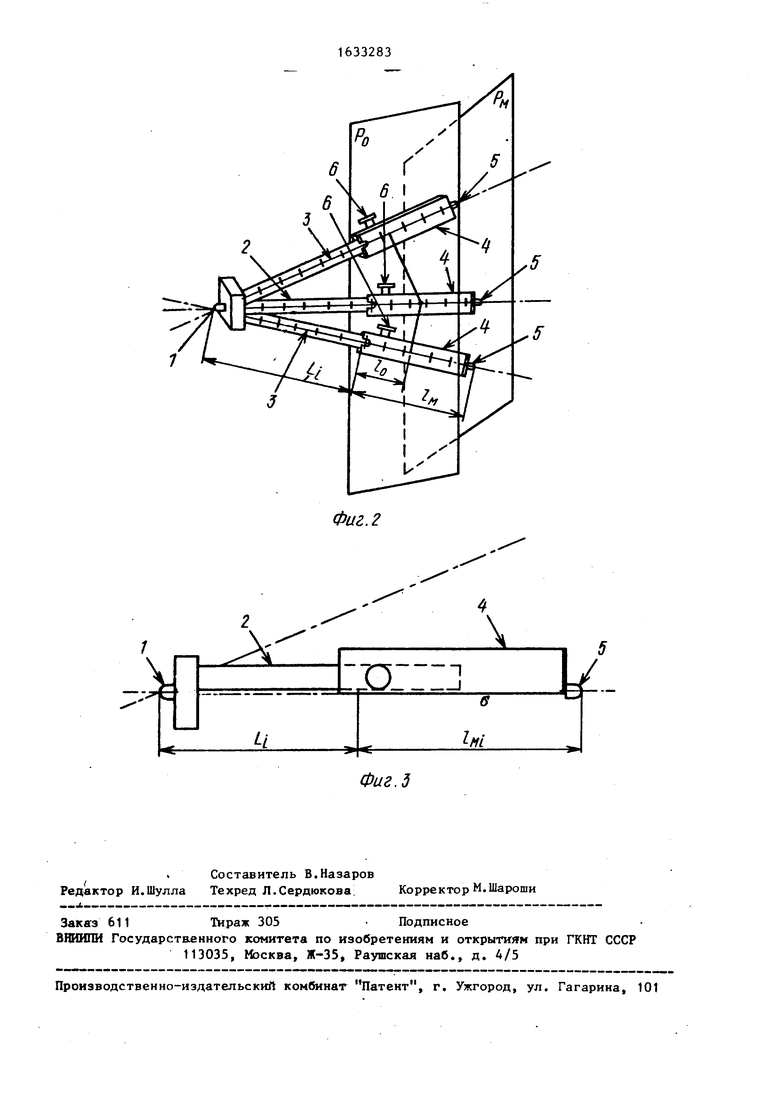
На фиг. 1 показана схема осуществления способа; на фиг. 2 - схема устройства; на фиг. 3 - измерительная линейка, продольный разрез.
Точка поверхности обозначена А, а точки пересечения направлений измерения расстояний с референтной плоскостью 1 - соответственно через А,, А А
Плоскости ,
и .
2 Э
взаимно
J . J4J1W1«I U 1 П По Ха
перпендикулярны и пересекаются по линии . Плоские углы АгА(А9 и А3А,,А4 равны ft, . Точки Ag-и Ag являются основаниями перпендикуляров, опущенных из АЛ на продолжения прямых АеАэ и .. Точка 0 является ортогональной проекцией точки Af на плоскость 1, Для вывода формулы вычисления длины перпендикуляра АдО обозначают измеренные длины по направлениям , 1( ), А(А + как в,а,с и вычисляют рас- стояния А и А$А4 по формуле косинусов. Далее, пользуясь вычисленными расстояниями, вычисляют по формуле ко-° 4
jin &±§in -2sj.n sjj 1cosj
sin
7
(3)
На фиг. 2 представлена схема устройства, где показаны пята 1, фиксирующая положение точки, относительно которой выполняют измерения, измерительная линейка 2 со шкалой, дополнительные линейки 3, передвижные части 4 линеек со шкалами, пяты 5 на передвижной части линеек, закрепительные винты 6;кроме того, РО - положение референтной плоскости при задании ее
синусов значение Ъд4д,д , лежащего и оптическими способами, Рм - положение
плоскости 1
референтной плоскости при задании ее механическими способами. Вместо шкал в устройстве могут быть использованы приспособления для измерения перемещений: индикаторы часового типа, микрометры, муаровые датчики и т.п.
cos
У
AlIAtil±lAiIA tllA4 A.f.(1
ПА А ТЦ-АаГ
Таким образом, в, четырехугольнике AjAjA-jAs известны значения всех внут ренних углов 1д6д,«f ,
1 90°; LM,A(. 180e-f.
Для нахождения длины стороны необходимо вычислить 1-Д,Д,А6 Рассматривая треугольник , в котором LAiAjA 90Л, a .A,3 jf, получают формулу вычисления угла
|для случая, когда
t8(f,- ctgfi,-
tglft- ctgfV ---f--.
(2)
Аналогичная формула для случая, когда а с.используется и для вычисления Ьд д А , только в ней вместо (J{ следует читать Cf4, вместо b - с а вместо ft, - Й2.
Для случая когда а Ь; с, в фор муле величины а и Ь, а также а и с следует поменять местами. Для случая, когда а Ь; с, значениеt b/c.
Расстояния А.-А6 и находят по формулам
А3-А6 asin((; Aj-Aj asin
Квадрат длины диагонали четырехугольника находят по формуле
Iа
(0-АЭ)
,,+sinltfi - 2sinC{,sinj|icosjf) ,
sin $
пользуясь которой из прямоугольного треугольника А,ОАЭ находят и отстояние точки А, от плоскости 1 по формуле
jin &±§in -2sj.n sjj 1cosj
sin
7
(3)
На фиг. 2 представлена схема устройства, где показаны пята 1, фиксирующая положение точки, относительно которой выполняют измерения, измерительная линейка 2 со шкалой, дополнительные линейки 3, передвижные части 4 линеек со шкалами, пяты 5 на передвижной части линеек, закрепительные винты 6;кроме того, РО - положение референтной плоскости при задании ее
оптическими способами, Рм - положение
референтной плоскости при задании ее механическими способами. Вместо шкал в устройстве могут быть использованы приспособления для измерения перемещений: индикаторы часового типа, микрометры, муаровые датчики и т.п.
Определение отстояния от точки до референтной плоскости выполняется следующим образом: совмещают пяту с точ- кой, в местах пересечения плоскости Р Оерут отсчеты 10,1 и LJ по каждой линейке, находят значения а, Формулам
Ь, с по
а
Ь
о, +
1ог +
V
г
с 10 + (Хз ,
находят величину отстояния точки от плоскости по формулам (1) - (3).
В случае задания референтной плоскости механическим путем совмещают пяту 1 с точкой, открепляют винты 6 и перемещают передвижные части 4 линеек до контакта пят 5 с плоскостью Рм, берут отсчеты (У{ и по каждой линейке, находят значения а, Ь, с. по формулам
а
Ь
IMC дч 1
+ У| ;
+ tft J
мэ +
искомую величину находят по формулам (1) - (3).
Формула изобретения
1. Способ определения отстояния точки от референтной плоскости, при котором задают три направления, причем два из них задают из определяемой точки, измеряют по заданным направлениям три расстояния, при т том два
51
расстояния измеряют до референтной плоскости, и обрабатывают результаты измерений, отличаю щи й- с я тем, что, с целью повышения точности, измеряют углы между третьим направлением и первыми двумя направлениями при определяемой точке, при этом плоскости, в которых лежат первое и третье направления, второе и третье направления располагают ортогонально, а третье расстояние измеряют до референтной плоскости.
2. Устройство для измерения отсто1 яния точки от референтной плоскости,
332836
содержащее измерительную линейку со шкалой и пятой, отличающееся тем, что, с целью повышения точности, к пяте жестко прикреплены две дополнительные линейки со шкалами, оси которых и ось измерительной линейки пересекаются в точке начала отсчетов всех шкал, оси дополнительных линеек расположены во взаимно перпендикулярных плоскостях, прохо- дящих соответственно через ось дополнительной линейки и ось измерительной линейки, причем все линейки вы- jr похшены раздвижными.
10

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| Чертежный прибор для составления планов наземной стереофотосъемки | 1958 |
|
SU122288A1 |
| Измерительный прибор | 1929 |
|
SU19375A1 |
| Способ определения малых линейных перемещений объектов | 1982 |
|
SU1040332A1 |
| Способ коллинеарного переноса оси референтного направления | 1989 |
|
SU1703973A1 |
| Прибор для построения кривых | 1981 |
|
SU988589A1 |
| Тест-объект для определения размеров рентгеновского изображения | 1982 |
|
SU1026774A1 |
| Командирский прибор по системе (угломера) Турова-Михайловского | 1922 |
|
SU15239A1 |
Изобретение относится к области измерительной техники, в частности к геодезии, и может быть использовано при сборке оборудования и контроле сопрягаемых поверхностей. Целью изобретения является расширение области применения за счет возможности выполнения измерений при отсутствии силы тяжести, при произвольном ориентировании, референтной плоскости, а также повышение точности измерений и производительности труда. При осуществлении способа формируют в определяемой точке два луча, расходящихся под постоянными углами, ориентированные таким образом, что каждый луч и направление измерений расположены в двух взаимно перпендикулярных плоскостях. Все направления жестко фиксируются в пучке и по каждому лучу изменяют масштаб измерения пропорционально секансу угла. Устройство состоит из линейки с пятой К пяте жестко прикреплены измерительные линейки со шкалами, оси которых пересекаются в одной точке, совпадающей с началом отсчета, причем все линейки раздвижные с дополнительными шкалами,выполненными с возможностью перемещения относительно начала отсчета, на концах шкал имеются пяты, фиксирующие положение начала отсчета относительно референтной плоскости. 2 с.п.ф-лы, 3 ил. с е (Л О5 СО со 00 со
JSt
Фиг.1
Фиг.2
| Способ определения превышений | 1982 |
|
SU1048313A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Т. Г. Шевченко | 0 |
|
SU356458A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Деймлих Ф | |||
| Геодезическое инстру- ментоведение | |||
| - М.: Недра, 1970, с | |||
| Саморазгружающаяся железнодорожная платформа | 1921 |
|
SU366A1 |
| Нивелирная рейка | 1976 |
|
SU609053A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
