Изобретение относится к приборостроению и может быть применено для создания систем автоматического контроля и управления движением мобильных объектов относительно ориентирующей линии, в частности сельскохозяйственных машинно-тракторных агрегатов, автоматических транспортных тележек, горных машин в плоскости пласта относительно ориентирующего светоконтрастНОГО СЛОЯ о
Цель изобретения - повышение точности устройства,,
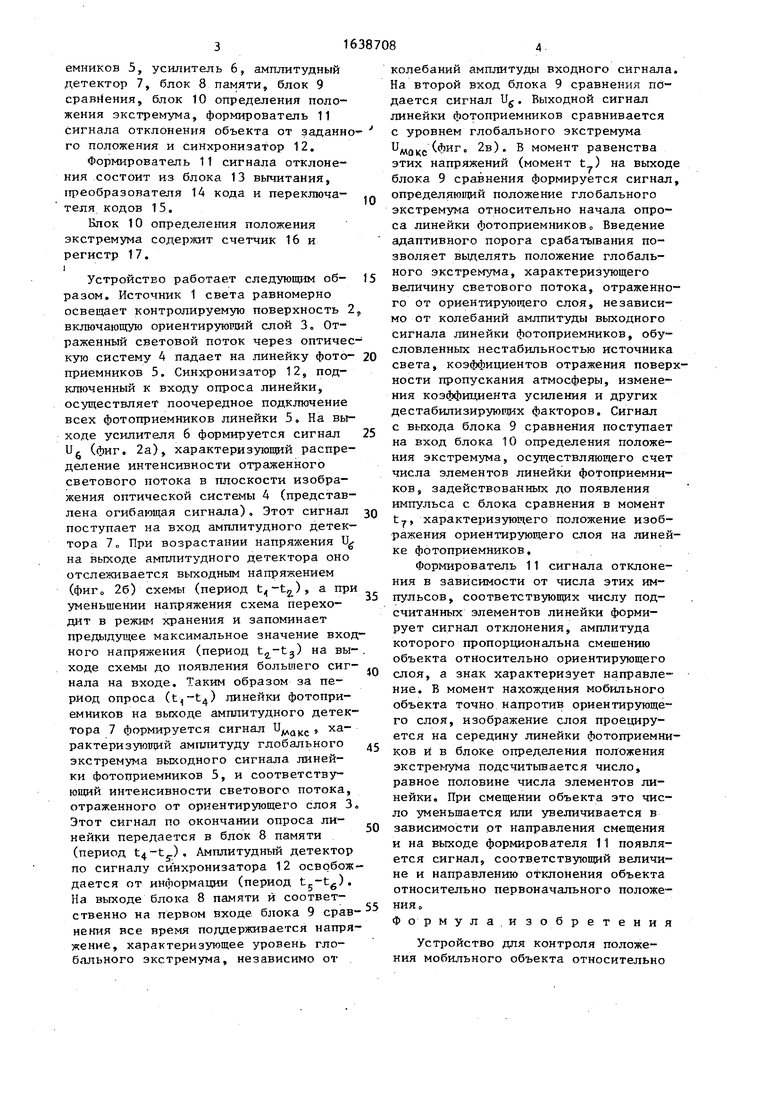
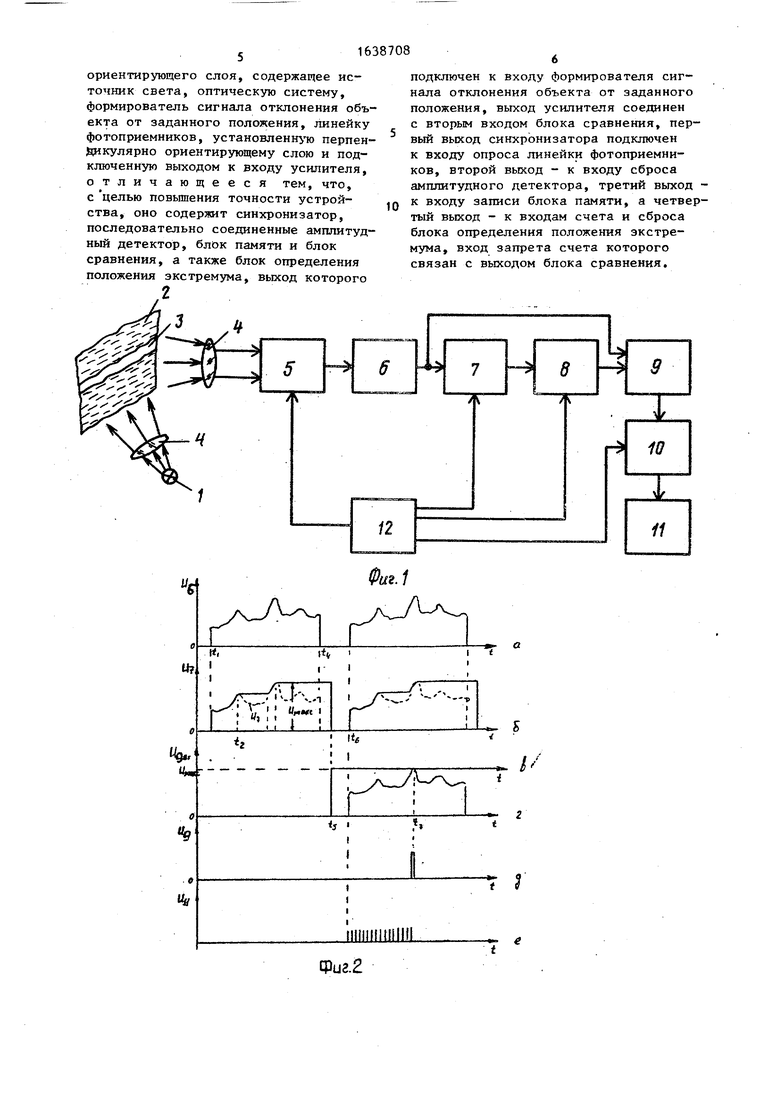
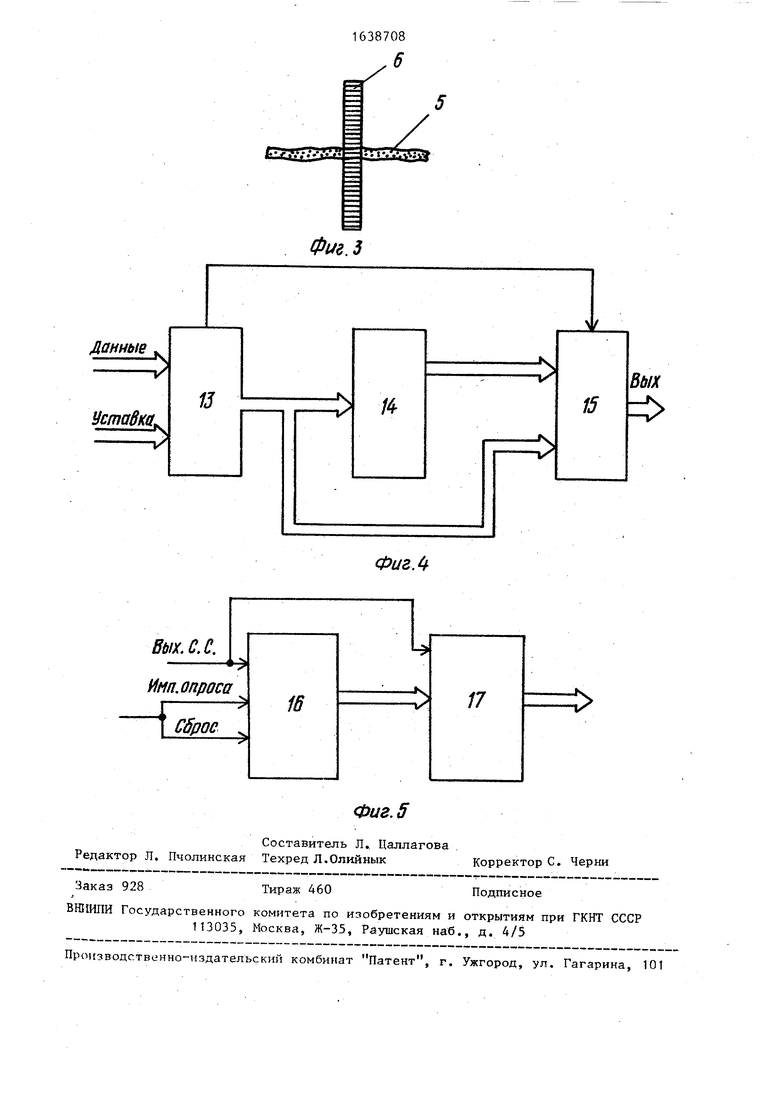
На фиго 1 приведена функциональная схема устройства; на фиг„ 2 - временные диаграммы; на фиг, 3 - расположение линейки фотоприемников относительно ориентирующего слоя; на фиг. 4 - схема формирователя сигнала отклонения объекта от заданного положения; на фиг о 5 - схема блока определения положения экстремума.
Устройство содержит источник 1 света участок 2 контролируемой поверхности, ориентирующий слой 3, оптическую систему 4, линейку фотоприОЭ&Э
оо i
о
00
емников 5, усилитель 6, амплитудный детектор 7, блок 8 памяти, блок 9 сравнения, блок 10 определения положения экстремума, формирователь 11 сигнала отклонения объекта от заданно го положения и синхронизатор 12.
Формирователь 11 сигнала отклонения состоит из блока 13 вычитания, преобразователя 14 кода и переключателя кодов 15.
Блок 10 определения положения экстремума содержит счетчик 16 и регистр 17. i
Устройство работает следующим об-
разом. Источник 1 света равномерно освещает контролируемую поверхность 2 включающую ориентирующий слой 3. Отраженный световой поток через оптическую систему 4 падает на линейку фото- приемников 5. Синхронизатор 12, подключенный к входу опроса линейки, осуществляет поочередное подключение всех фотоприемников линейки 5, На выходе усилителя 6 формируется сигнал U (фиг. 2а), характеризующий распределение интенсивности отраженного светового потока в плоскости изображения оптической системы 4 (представлена огибающая сигнала), Этот сигнал поступает на вход амплитудного детектора 70 При возрастании напряжения U на выходе амплитудного детектора оно отслеживается выходным напряжением
(фиг 26) схемы (период ), а при уменьшении напряжения схема переходит в режим хранения и запоминает предыдущее максимальное значение входного напряжения (период ) на выходе схемы до появления большего сигнала на входе. Таким образом за период опроса (t,-t4) линейки фотоприемников на выходе амплитудного детектора 7 формируется сигнал UMaKC, характеризующий амплитуду глобального экстремума выходного сигнала линейки фотоприемников 5, и соответствующий интенсивности светового потока, отраженного от ориентирующего слоя 3. Этот сигнал по окончании опроса линейки передается в блок 8 памяти (период Ц-ty), Амплитудный детектор по сигналу синхронизатора 12 освобождается от информации (период ). На выходе блока 8 памяти и соответственно на первом входе блока 9 срав нения все время поддерживается напря жение, характеризующее уровень глобального экстремума, независимо от
„
10
15
, 2025 30
, 35
40
45
50
55
колебаний амплитуды входного сигнала. На второй вход блока 9 сравнения подается сигнал Ug. Выходной сигнал линейки фотоприемников сравнивается с уровнем глобального экстремума имокс(сЬиг. 2в). В момент равенства этих напряжений (момент t ) на выходе блока 9 сравнения формируется сигнал, определяющий положение глобального экстремума относительно начала опроса линейки фотоприемников„ Введение адаптивного порога срабатывания позволяет выделять положение глобального экстремума, характеризующего величину светового потока, отраженного от ориентирующего слоя, независимо от колебаний амлпитуды выходного сигнала линейки фотоприемников, обусловленных нестабильностью источника света, коэффициентов отражения поверхности пропускания атмосферы, изменения коэффициента усиления и других дестабилизирующих факторов. Сигнал с выхода блока 9 сравнения поступает на вход блока 10 определения положения экстремума, осуществляющего счет числа элементов линейки фотоприемников, задействованных до появления импульса с блока сравнения в момент t7, характеризующего положение изображения ориентирующего слоя на линейке фотоприемников.
Формирователь 11 сигнала отклонения в зависимости от числа этих импульсов, соответствующих числу подсчитанных элементов линейки формирует сигнал отклонения, амплитуда которого пропорциональна смешению объекта относительно ориентирующего слоя, а знак характеризует направление. В момент нахождения мобильного объекта точно напротив ориентирующего слоя, изображение слоя проецируется на середину линейки фотоприемни- ков и в блоке определения положения экстремума подсчитывается число, равное половине числа элементов линейки. При смещении объекта это число уменьшается или увеличивается в зависимости от направления смещения и на выходе формирователя 11 появляется сигнал, соответствующий величине и направлению отклонения объекта относительно первоначального положенияФормула изобретения
Устройство для контроля положения мобильного объекта относительно
ориентирующего слоя, содержащее источник света, оптическую систему, формирователь сигнала отклонения объекта от заданного положения, линейку фотоприемников, установленную перпендикулярно ориентирующему слою и подключенную выходом к входу усилителя, отличающееся тем, что, с целью повышения точности устройства, оно содержит синхронизатор, последовательно соединенные амплитудный детектор, блок памяти и блок сравнения, а также блок определения положения экстремума, выход которого
2
подключен к входу формирователя сигнала отклонения объекта от заданного положения, выход усилителя соединен с вторым входом блока сравнения, первый выход синхронизатора подключен к входу опроса линейки фотоприемников, второй выход - к входу сброса амплитудного детектора, третий выход - к входу записи блока памяти, а четвертый выход - к входам счета и сброса блока определения положения экстремума, вход запрета счета которого связан с выходом блока сравнения.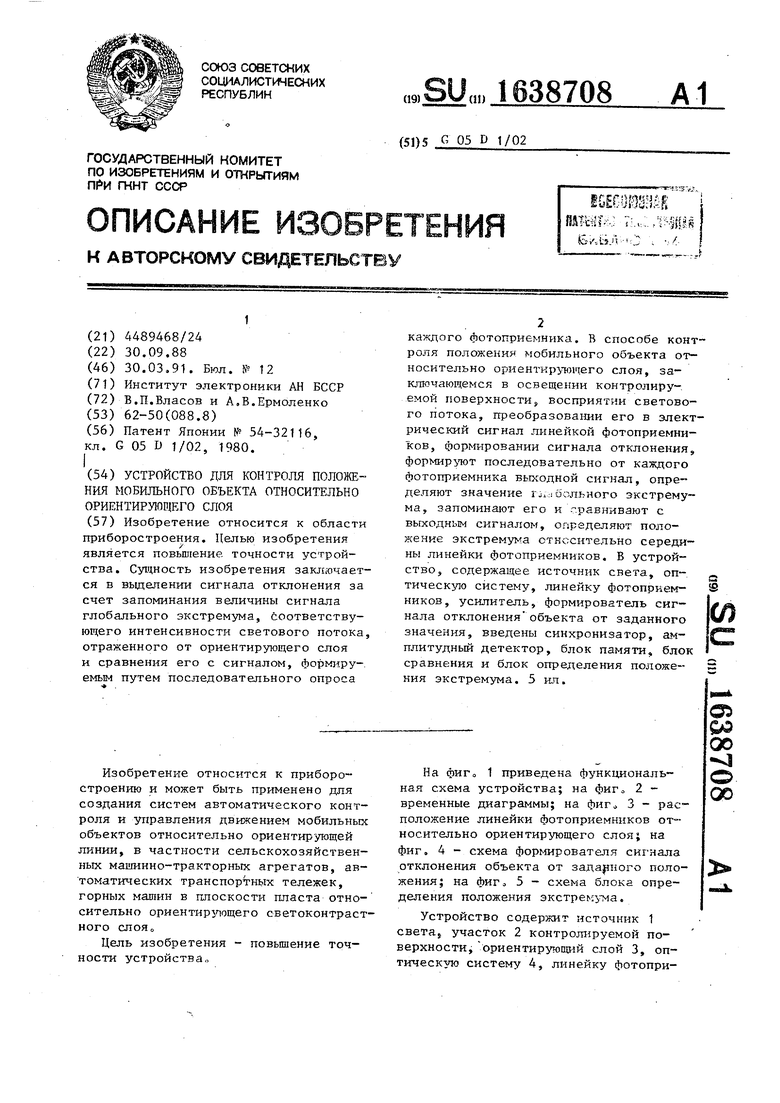
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения мобильного объекта относительно ориентирующей линии | 1989 |
|
SU1767478A2 |
| Устройство для измерения индикатрис рассеяния света | 1988 |
|
SU1603255A1 |
| Устройство для регистрации финиша в спортивных состязаниях | 1989 |
|
SU1737475A1 |
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ИЗДЕЛИЙ | 1988 |
|
SU1828240A1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СИГНАЛИЗАТОР ОБЛЕДЕНЕНИЯ | 2022 |
|
RU2791724C1 |
| Устройство для измерения диаметра изделий | 1987 |
|
SU1730537A1 |
| СИГНАЛИЗАТОР ОБЛЕДЕНЕНИЯ | 2014 |
|
RU2565416C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| Способ измерения положения объекта и устройство для его осуществления | 1982 |
|
SU1067352A1 |
Изобретение относится к области приборостроения. Целью изобретения является повышение точности устройства. Сущность изобретения заключается в выделении сигнала отклонения за счет запоминания величины сигнала глобального экстремума, соответствующего интенсивности светового потока, отраженного от ориентирующего слоя и сравнения его с сигналом, формируемым путем последовательного опроса каждого фотоприемника. В способе контроля положения мобильного объекта относительно ориентируюиего слоя, заключающемся в освещении контролируемой поверхностиs восприятии светового потока, преобразовании его в электрический сигнал линейкой фотоприемников, формировании сигнала отклонения, формируют последовательно от каждого фотоприемника выходной сигнал, определяют значение i j, .илльного экстремума, запоминают его и уравнивают с выходным сигналом, определяют положение экстремума относительно середины линейки фотоприемников. В устройство, содержащее источник света, оптическую систему, линейку фотоприемников, усилитель, формирователь сигнала отклонения объекта от заданного значения, введены синхронизатор, амплитудный детектор, блок памяти, блок сравнения и блок определения положения экстремума. 5 ил. е 9
И,
Фиг.2
Ј/&
Фм.З
1638708 ,6
« Vgity
Фиг.4
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| I | |||
