Изобретение относится к автоматизации производственных процессов, в частности автоматизации вождения мобильных объектов по светоконтрастным ориентирующим линиям, и является усовершенствованием известного в авт. св. № 1638708.
В изобретении по авт. св. № 1638708 описано устройство, содержащее источник света, оптическую систему, линейку фотопреобразователей, усилитель, амплитудный детектор, блок памяти, блок сравнения, блок определения положения экстремума, формирователь сигнала отклонения, синхронизатор. Недостатком данного устройства является низкая надежность работы при локальных замещения ориентирующей линии, что приёодит к ложным срабатываниям устройства, В устройствах автоматического вождения мобильных объектов по светоконтрастным ориентирующим линиям нередко возникают ситуации, когда на ориентирующей линии встречаются незначительные по величине неоднородности, имеющие коэффициент отражения, сравнимый с коэффициентом отражения контролируемой поверхности. Это обуславливает появление ложных сигналов о положении объекта относительно ориентирующей линии, что приводит к ошибкам в системе управления обьектом.
Целью изобретения является повышение надежности устройства за счет исключения влияния погрешностей определения положения мобильного объекта при локальных замещениях ориентирующей линии.
Цель достигается тем, что в устройство, содержащее источник света, оптическую систему, линейку фотопреобразователей, усилитель, синхронизатор, амплитудный детектор, блок памяти, блок сравнения, блок определения положения экстремума, формирователь сигнала отклонения, введены блок вычитания, задатчик опорного напряжения, компаратор и счетчик, причем первый вход блока вычитания присоединен к выходу блока памяти, к второму входу подЧ
Ё
VI о VJ
ы
00
Ю
ключей за датчик опорного напряжения, выход блока вычитания подключен к первому входу компаратора, к второму входу подключен выход усилителя, выход компаратора подключен к счетчику, вход сброса которого соединен с синхронизатором, а выход присоединен к формирователю сигнала отклонения. Введение блока вычитания, задатчика опорного напряжения, компаратора и счетчика позволяет выявлять периоды опроса линейки фотопреобразова- телей, вш которых не удается выделить сигнал, соответствующий положению объекта относительно ориентирующей линии, обусловленный локальными замещениями ее различными неоднородностями, из процесса контроля.
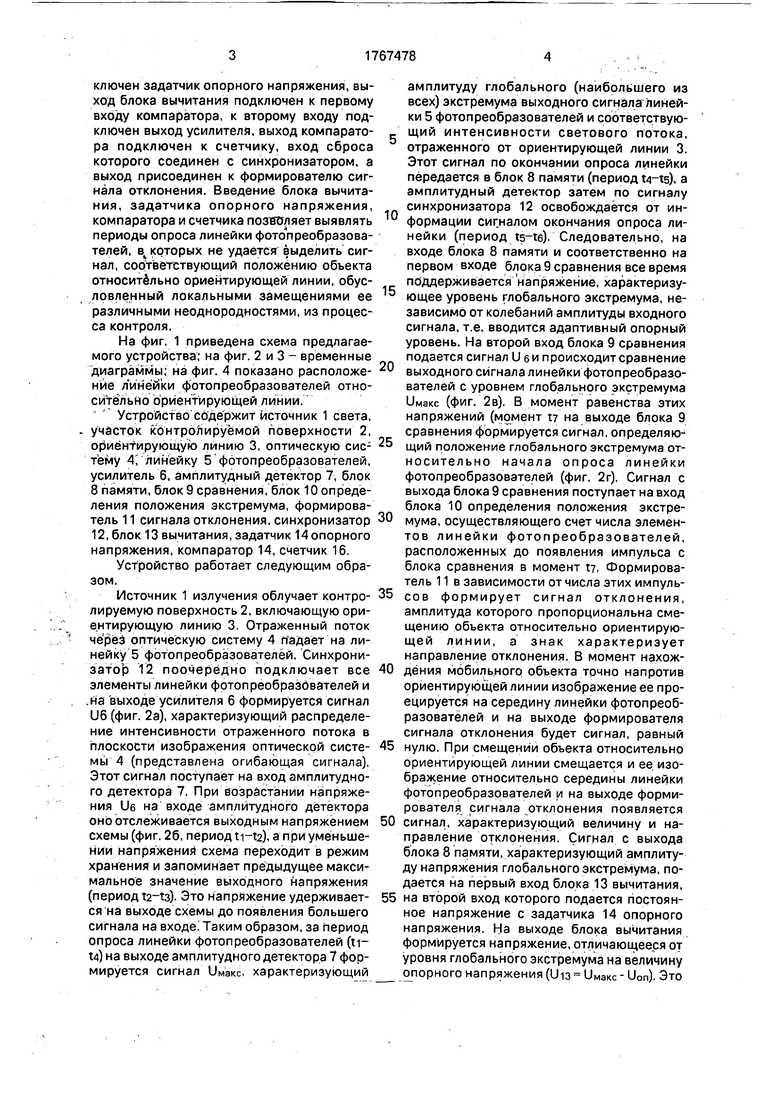
На фиг. 1 приведена схема предлагаемого устройства; на фиг. 2 и 3 - временные диаграммы; на фиг. 4 показано расположение линейки фотопреобразователей относительно ориентирующей линии.
Устройство содержит источник 1 света, участок контролируемой поверхности 2, ориентирующую линию 3, оптическую систему 4; линейку 5 фотопреобразователей, усилитель 6, амплитудный детектор 7, блок 8 памяти, блок 9 сравнения, блок 10 определения положения экстремума, формирователь 11 сигнала отклонения, синхронизатор 12, блок 13 вычитания, задатчик 14опорного напряжения, компаратор 14, счетчик 16.
Устройство работает следующим образом.
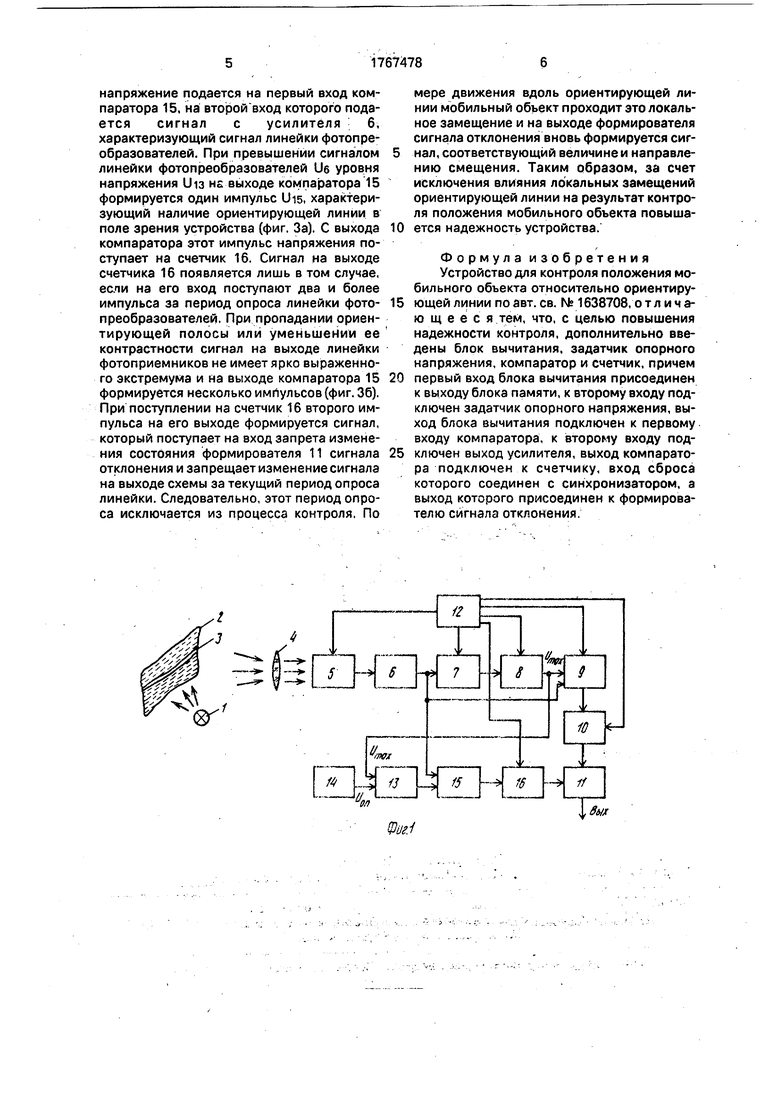
Источник 1 излучения облучает контролируемую поверхность 2, включающую ориентирующую линию 3. Отраженный поток через оптическую систему 4 падает на линейку 5 фотопреобразователёй. Синхронизатор 12 поочередно подключает все элементы линейки фотопреобразователей и .на выходе усилителя 6 формируется сигнал U6 (фиг. 2а), характеризующий распределение интенсивности отраженного потока в плоскости изображения оптической системы 4 (представлена огибающая сигнала). Этот сигнал поступает на вход амплитудного детектора 7. При возрастании напряжения Ue на входе амплитудного детектора оно отслеживается выходным напряжением схемы (фиг, 26, период ti-t2), а при уменьшении напряжения схема переходит в режим хранения и запоминает предыдущее максимальное значение выходного напряжения (период t2-ta). Это напряжение удерживается на выходе схемы до появления большего сигнала на входе. Таким образом, за период опроса линейки фотопреобразователей (ti- t4) на выходе амплитудного детектора 7 формируется сигнал Кмакс, характеризующий
0
5
0
5
0
5
0
5
0
5
амплитуду глобального (наибольшего из всех) экстремума выходного сигнала линей- ки 5 фотопреобразователей и соответствующий интенсивности светового потока, отраженного от ориентирующей линии 3. Этот сигнал по окончании опроса линейки передается в блок 8 памяти (период t-i-ts), a амплитудный детектор затем по сигналу синхронизатора 12 освобождается от информации сигналом окончания опроса линейки (период ts-te). Следовательно, на входе блока 8 памяти и соответственно на первом входе блока 9 сравнения все время поддерживается напряжение, характеризующее уровень глобального экстремума, независимо от колебаний амплитуды входного сигнала, т.е. вводится адаптивный опорный уровень. На второй вход блока 9 сравнения подается сигнал U ей происходит сравнение выходного сигнала линейки фотопреобразователей с уровнем глобального экстремума 11макс (фиг. 2в). В момент равенства этих напряжений (момент t на выходе блока 9 сравнения формируется сигнал, определяющий положение глобального экстремума от- носительно начала опроса линейки фотопреобразователей (фиг. 2г). Сигнал с выхода блока 9 сравнения поступает на вход блока 10 определения положения экстремума, осуществляющего счет числа элементов линейки фотопреобразователей, расположенных до появления импульса с блока сравнения в момент t, Формирователь 11 в зависимости от числа этих импуль- сов формирует сигнал отклонения, амплитуда которого пропорциональна смещению объекта относительно ориентирующей линии, а знак характеризует направление отклонения. В момент нахождения мобильного объекта точно напротив ориентирующей линии изображение ее проецируется на середину линейки фотопреобразователей и на выходе формирователя сигнала отклонения будет сигнал, равный нулю. При смещении объекта относительно ориентирующей линии смещается и ее изображение относительно середины линейки фотопреобразователей и на выходе формирователя сигнала отклонения появляется сигнал, характеризующий величину и направление отклонения, Сигнал с выхода блока 8 памяти, характеризующий амплитуду напряжения глобального экстремума, подается на первый вход блока 13 вычитания, на второй вход которого подается постоянное напряжение с задатчика 14 опорного напряжения. На выходе блока вычитания формируется напряжение, отличающееся от уровня глобального экстремума на величину опорного напряжения (Ui3 UMai c-Uon). Это
напряжение подается на первый вход компаратора 15, на второй вход которого подается сигнал с усилителя 6, характеризующий сигнал линейки фотопреобразователей. При превышении сигналом линейки фотопреобразователей Ue уровня напряжения 1Из НЕ выходе компаратора 15 формируется один импульс Ihs, характеризующий наличие ориентирующей линии в поле зрения устройства (фиг. За). С выхода компаратора этот импульс напряжения поступает на счетчик 16. Сигнал на выходе счетчика 16 появляется лишь в том случае, еспи на его вход поступают два и более импульса за период опроса линейки фото- преобразователей. При пропадании ориентирующей полосы или уменьшении ее контрастности сигнал на выходе линейки фотоприемников не имеет ярко выраженного экстремума и на выходе компаратора 15 формируется несколько имг1ульсов(фиг. 36). При поступлении на счетчик 16 второго импульса на его выходе формируется сигнал, который поступает на вход запрета изменения состояния формирователя 11 сигнала отклонения и запрещает изменение сигнала на выходе схемы за текущий период опроса линейки. Следовательно, этот период опроса исключается из процесса контроля. По
мере движения вдоль ориентирующей линии мобильный объект проходит это локальное замещение и на выходе формирователя сигнала отклонения вновь формируется сигнал, соответствующий величине и направлению смещения. Таким образом, за счет исключения влияния локальных замещений ориентирующей линии на результат контроля положения мобильного объекта повышается надежность устройства.
Формула изобретения Устройство для контроля положения мобильного объекта относительно ориентирующей линии по авт. св. № 1638708, отличающееся тем, что, с целью повышения надежности контроля, дополнительно введены блок вычитания, задатчик опорного напряжения, компаратор и счетчик, причем первый вход блока вычитания присоединен к выходу блока памяти, к второму входу подключен задатчик опорного напряжения, выход блока вычитания подключен к первому входу компаратора, к второму входу подключен выход усилителя, выход компаратора подключен к счетчику, вход сброса которого соединен с синхронизатором, а выход которого присоединен к формирователю сигнала отклонения
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения мобильного объекта относительно ориентирующего слоя | 1988 |
|
SU1638708A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |
| Оптико-электронное устройство для измерения линейных и угловых перемещений | 1985 |
|
SU1265476A1 |
| МНОГОКАНАЛЬНЫЙ ПАНОРАМНЫЙ ПРИЕМНИК | 1996 |
|
RU2115997C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| ТЕЛЕВИЗИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2451419C1 |
| Способ измерения положения объекта и устройство для его осуществления | 1982 |
|
SU1067352A1 |
| Устройство для контроля качества магнитного носителя | 1986 |
|
SU1531155A1 |
Устройство содержит источник 1 света, участок контролируемой поверхности 2, ориентирующую линию 3, оптическую систему 4, линейку 5 фотопреобразователей, усилитель 6, амплитудный детектор 7, блок 8 памяти, 1 блок 9 сравнения, блок 10 определения положения экстремума, формирователь 11 сигнала отклонения синхронизатор 12, блок 13 вычитания, за- датчик 14 опорного напряжения, компаратор 15, счетчик 16. 4 ил.
.ЈHZHiIhHtt
{
//
J
Редактор 4. f)tp
Составитель Л. Птенцова
Техред М.МоргенталКорректор Н. Кешеля
V
Риг 3
C-.:.
Р-иг.Ь
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующего слоя | 1988 |
|
SU1638708A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
