1Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1642574A2 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1642573A2 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464263A1 |
| Способ импульсного управления в режиме торможения вентильным электродвигателем | 1986 |
|
SU1642572A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1646025A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464262A1 |
| Способ обнаружения и локализации отказов вентильного электродвигателя | 1988 |
|
SU1640798A1 |
| Вентильный электродвигатель с токовым регулированием | 1987 |
|
SU1494188A1 |
| Способ динамического торможения вентильного электродвигателя | 1985 |
|
SU1317629A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
Изобретение относится к электротехнике . Целью изобретения является повышение линейности регулировочных механических характеристик при сохранении надежности путем исключения образования цепей для протекания сквозных токов в непосредственном преобразователе частоты и повышение разрешающей способности в области высоких частот вращения. Способ импульсного управления заключается в том, что по командам датчика 3 положения ротора электромеханического преобразователя коммутируют ключи 4-9 непосредственно преобразователя 2 частоты, обеспечивая подключение секций 11,12,13 обмотки якоря электромеханического преобразователя к источнику питания 51. Управляющее воздействие для каждого ключа формируют на угловом интервале (0 с фазовым сдвигом Q 21Г/3 для каждого последующего ключа в группе и фазовым сдвигом Qr iT для ключей разных групп, подключенных к одноименным секциям обмотки якоря. В начале каждого межкоммутационного интервала выявляют группу ключей преобразователя частоты, в которой произошла очередная коммутация ключей по коман- 1 дам датчика 3 положения, и периодически включают и выключают один из ключей этой группы. В противофазе с этим ключом дополнительно включают и выключают ключ другой группы, который подключен к секции, не связанной с ключами, на которые на данном межкоммутационном интервале подана команда от датчика 3. В результате в моменты импульса управления по секциям обмотки якоря протекают токи от источника питания 51 через открытые на этом интервале ключи, а в моменты паузы импульсов управления образуются дополнительные цепи для протекания токов в секциях обмотки якоря под действием ЭДС вращения. На всех межкоммутационных интервалах по секциям обмотки якоря протекают непрерывные токи и отсутствуют сквозные токи. 5 ил. (Л
Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах с вентильными электродвигателями.
Целью изобретения является повышение линейности регулировочных ха- . рактеристик при сохранении надежности путем исключения образования цепей
для протекания сквозных токов в преобразователе частоты и повышение разрешающей способности в области высоких частот вращения.
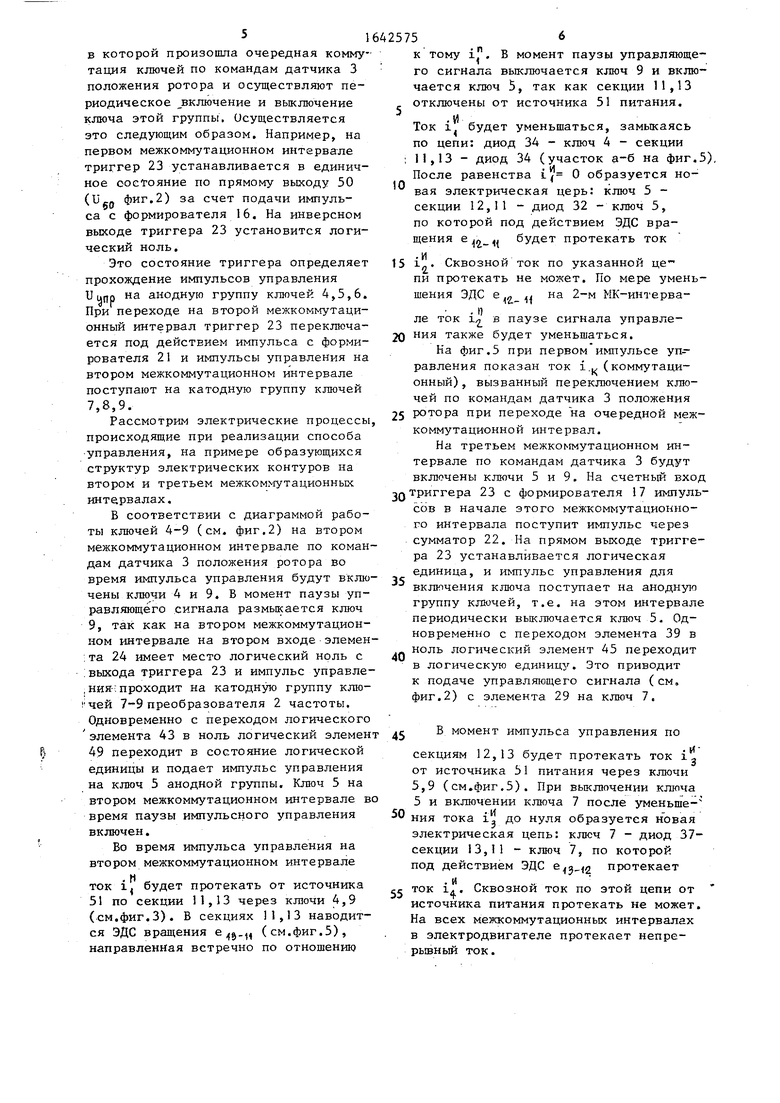
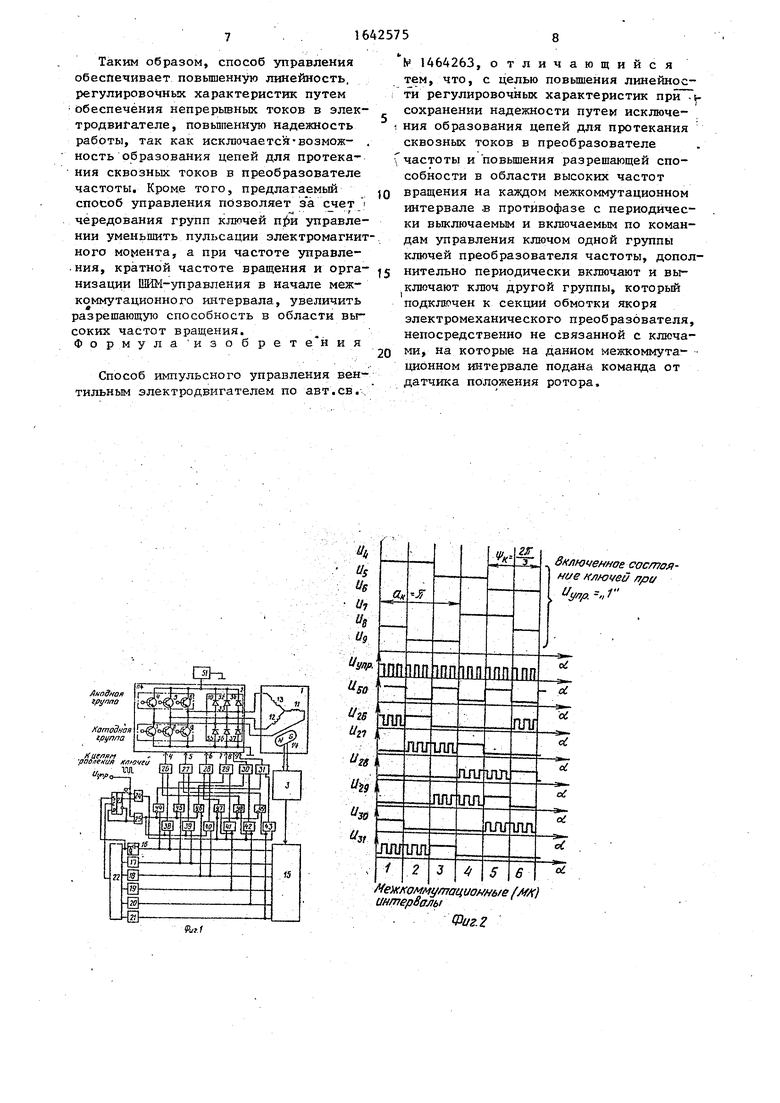
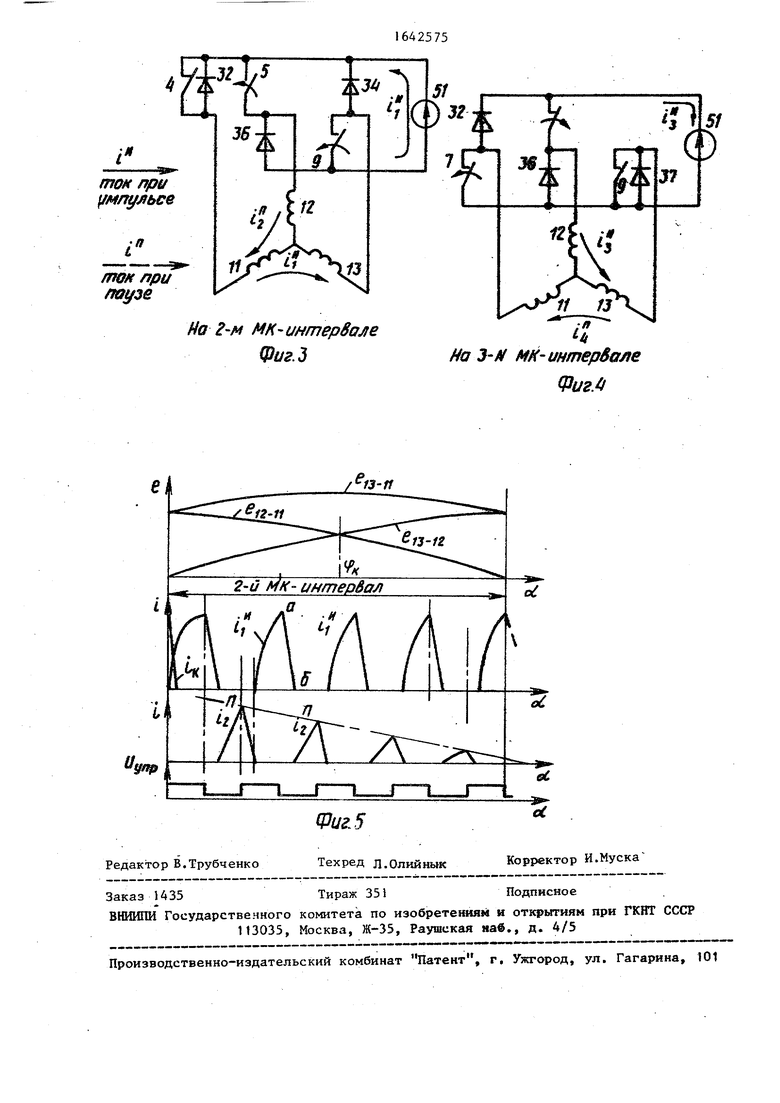
На фиг.1 изображена схема устройства управления вентильным электродвигателем; на фиг.2 - диаграммы работы устройства управления; на фиг.З, 4 - электрические контуры и контурные токи, образованные соответственно на 2-м и 3-м межкоммутационных интервалах во время импульса и паузы сигнала управления; на фиг.5 - ЭДС вращения, наведенные в секциях электродви- гателя, и токи, протекающие во время импульса i и паузы in сигнала управления.
Вентильный электродвигатель, реализующий данный способ управления, содержит многосекционный электромеханический преобразователь 1, двухполу- периодный преобразователь 2 частоты, датчик 3 положения ротора. Преобразователь 2 частоты включает в себя анод- 5 ния .
35
ную группу ключей 4-6, катодную группу ключей 7-9 и диодный мост 10 обратного тока. Электромеханический преобразователь 1, выполненный на базе синхронной машины, снабжен секциями 30 11-13 якорной обмотки и индуктором 14. Устройство управления включает в себя функциональный преобразователь Слогический блок) 15 сигналов датчика 3 в сигналы управления ключами преобразователя 2, формирователи 16-21 импульсов, сумматор 22, триггер 23, восемь логических элементов 2ИЛИ 24-31. Мост 10 обратного тока включает в себя диоды 32-37. Вентильный электродвигатель содержит также логические элементы 2И 38-43 с двумя прямыми входами и 2И 44-49 с одним прямым и одним инверсным входами.
Импульсы управления Uunp подаются
40
45
Импульсное управление вентильным электродвигателем происходит следую щим образом.
Предположим, что при включении питания на первом межкоммутационном интервале (см.фиг .2) включаются по командам датчика 3 положения ротора ключи 4, непосредственного преобразователя частоты 2. Секции 11,12 обмотки якоря электромеханического преобразователя подключаются, к исто нику питания. Двигатель начинает вр щаться. После поворота индуктора
п
(ротора) 14 на уголр в анодно
группе по командам датчика 3 положе ния отключается ключ 4 и включается ключ 5. Угловой интервал включенного
состояния каждого ключа составляет
ол/ tyK -. Переключение ключей 7,8,9
в катодной группе будет происходить по сигналам датчика 3 положения.со смещением на угол(}г относительно
на первый вход каждого элемента 24, 25, на второй вход которых подается сигнал с соответствующего выхода триггера 23. Логическое состояние
сигналов на выходах триггера 23 опре- JQ ключей 4,5,6, подключенных соответ- де.ляет прохождение импульсов управления на анодную или катодную группу ключей преобразователя 2. Функциональный преобразователь 15 формирует по командам датчика 3 положения рото- ра сигналы управления для каждого ключа преобразователя 2 частоты. Эти сигналы перемножаются с импульсами управления в элементах 38-43 и по1
ственно к одноименным секциям обмотки якоря электромеханического преобразователя 1. Указанные угловые интервалы обеспечивает конструкция датчика 3 положения ротора и логика работы блока 15.
В начале очередного к-го межкоммутационного интервала выявляют груп пу ключей преобразователя частоты,
,
JQ 152025754
даются на управляющие цепи ключей 4-9 через логические элементы 26-31 . Функциональный преобразователь 15 связан с сумматором 22 через формирователи импульсов 16-21, которые формируют импульсы при смене межкоммутационных интервалов. При определенной конструкции датчика 3 блок 15 в устройстве управления может отсутствовать. Выход сумматора 22 подключен к счетному входу триггера 23, вход установки нуля которого подключен к выходу формирователя импульсов 16. Элементы 38-43 обеспечивают включение соответствующего ключа одной из групп преобразователя 2 во время паузы импульсов управления. Элементы 44-49 обеспечивают включение соответствующего ключа другой rpvnnbi ключей преобразователя 2 частоты в это же
время. Сигналы U2g -U-э подаются на цепи управления ключей 4-9 с элементов 26-31, изменяя импульсы управления .
Импульсное управление вентильным электродвигателем происходит следующим образом.
Предположим, что при включении питания на первом межкоммутационном интервале (см.фиг .2) включаются по командам датчика 3 положения ротора ключи 4, непосредственного преобразователя частоты 2. Секции 11,12 обмотки якоря электромеханического преобразователя подключаются, к источнику питания. Двигатель начинает вращаться. После поворота индуктора
п
(ротора) 14 на уголр в анодной
группе по командам датчика 3 положения отключается ключ 4 и включается ключ 5. Угловой интервал включенного
состояния каждого ключа составляет
ол/ tyK -. Переключение ключей 7,8,9
в катодной группе будет происходить по сигналам датчика 3 положения.со смещением на угол(}г относительно
ключей 4,5,6, подключенных соответ-
ключей 4,5,6, подключенных соответ-
ственно к одноименным секциям обмотки якоря электромеханического преобразователя 1. Указанные угловые интервалы обеспечивает конструкция датчика 3 положения ротора и логика работы блока 15.
В начале очередного к-го межкоммутационного интервала выявляют группу ключей преобразователя частоты,
в которой произошла очередная коммутация ключей по командам датчика 3 положения ротора и осуществляют периодическое включение и выключение ключа этой группы. Осуществляется это следующим образом. Например, на первом межкоммутационном интервале триггер 23 устанавливается в единичное состояние по прямому выходу 50 (Ugo фиг.2) за счет подачи импульса с формирователя 16. На инверсном выходе триггера 23 установится логический ноль.
Это состояние триггера определяет прохождение импульсов управления Uunp на анодную группу ключей 4,5,6. При переходе на второй межкоммутационный интервал триггер 23 переключается под действием импульса с формирователя 21 и импульсы управления на втором межкоммутационном интервале поступают на катодную группу ключей 7,8,9.
Рассмотрим электрические процессы происходящие при реализации способа управления, на примере образующихся структур электрических контуров на втором и третьем межкоммутационных интервалах.
В соответствии с диаграммой работы ключей 4-9 (см. фиг.2) на втором межкоммутационном интервале по командам датчика 3 положения ротора во время импульса управления будут включены ключи 4 и 9. Б момент паузы управляющего сигнала размыкается ключ 9, так как на втором межкоммутационном интервале на втором входе элемента 24 имеет место логический ноль с выхода триггера 23 и импульс управления проходит на катодную группу клю- 1 чей 7-9 преобразователя 2 частоты. Одновременно с переходом логического элемента 43 в ноль логический элемен 49 переходит в состояние логической единицы и подает импульс управления на ключ 5 анодной группы. Ключ 5 на втором межкоммутационном интервале в время паузы импульсного управления включен.
Во время импульса управления на втором межкоммутационном интервале
ток i. будет протекать от источника 51 по секции 11,13 через ключи 4,9 (см.фиг.З). В секциях 11,13 наводится ЭДС вращения (см.фиг.5), направленная встречно по отношению
к тому i . В момент паузы управляющего сигнала выключается ключ 9 и включается ключ 5, так как секции 11,13 отключены от источника 51 питания.
Ток i будет уменьшаться, замыкаясь по цепи: диод 34 - ключ 4 - секции 11,13 - диод 34 (участок а-б на фиг.5) После равенства i( 0 образуется новая электрическая церь: ключ 5 - секции 12,11 - диод 32 - ключ 5, по которой под действием ЭДС вращения е будет протекать ток
i-. Сквозной ток по указанной це
пи протекать не может. По мере уменьшения ЭДС е а ц на 2-м МК-интервале ток i, в паузе сигнала управле- ния также будет уменьшаться.
Ка фиг.5 при первом импульсе управления показан ток iK (коммутационный) , вызванный переключением ключей по командам датчика 3 положения ротора при переходе на очередной межкоммутационной интервал.
На третьем межкоммутационном интервале по командам датчика 3 будут включены ключи 5 и 9. На счетный вход риггера 23 с формирователя 17 импульсов в начале этого межкоммутационного интервала поступит импульс через сумматор 22. На прямом выходе триггера 23 устанавливается логическая единица, и импульс управления для включения ключа поступает на анодную группу ключей, т.е. на этом интервале периодически выключается ключ 5. Одновременно с переходом элемента 39 в ноль логический элемент 45 переходит в логическую единицу. Это приводит к подаче управляющего сигнала (см, фиг.2) с элемента 29 на ключ 7.
4j В момент импульса управления по
секциям 12,13 будет протекать ток i от источника 51 питания через ключи 5,9 (см.фиг.5). При выключении ключа 5 и включении ключа 7 после уменыпе- 5® ния тока ij до нуля образуется новая электрическая цепь: ключ 7 - диод 37- секции 13,11 - ключ 7, по которой под действием ЭДС протекает
ее ток i. Сквозной ток по этой цепи от источника питания протекать не может. На всех межкоммутационных интервалах в электродвигателе протекает непрерывный ток.
Таким образом, способ управления обеспечивает повышенную линейность, регулировочных характеристик путем обеспечения непрерывных токов в элек- тродвиГателе, повышенную надежность работы, так как исключаетс я-возмож- . ность образования цепей для протекания сквозных токов в преобразователе частоты. Кроме того, предлагаемый
способ управления позволяет за счет i чередования групп ключей при управлении уменьшить пульсации электромагнитного момента, а при частоте управления, кратной частоте вращения и орга- низации ШИМ-управления в начале межкоммутационного интервала, увеличить разрешающую способность в области высоких частот вращения. Формула изобретения
Способ импульсного управления вентильным электродвигателем по авт.св.
Аьодноя группа
Хатодноя группа
ИЦГЛЯМ
раоаения Mtavcir „ VUl
Uynf,
Putt
0
tf 1464263, отличающийся тем, что, с целью повышения линейности регулировочных характеристик при ь сохранении надежности путей исключе- ния образования цепей для протекания
сквозных токов в преобразователе частоты и повышения разрешающей способности в области высоких частот вращения на каждом межкоммутационном интервале в противофазе с периодически выключаемым и включаемым по командам управления ключом одной группы ключей преобразователя частоты, дополнительно периодически включают и выключают ключ другой группы, который подключен к секций обмотки якоря электромеханического преобразователя, непосредственно не связанной с ключами, на которые на данном межкоммутационном интервале подана команда от датчика положения ротора.
111,
Us Ue
1/7
UB Us
Уупр. so
fftt tfgt
% % 0
«я
Межкоммутационнь/е fMXl интервалы
Фиг 2
тон npt/ умлульсе
ток при паузе
Но 2-м МК интербале Фиг.З
2-й Улг- интервал
Редактор В.Трубченко
Фиг. 5
Техред Л.Олийньис
51
// Ift I
На 3-Af МК-интерболе VuB.fi
Корректор И.Муска
| Авторское свидетельство СССР N 4104518, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
