ё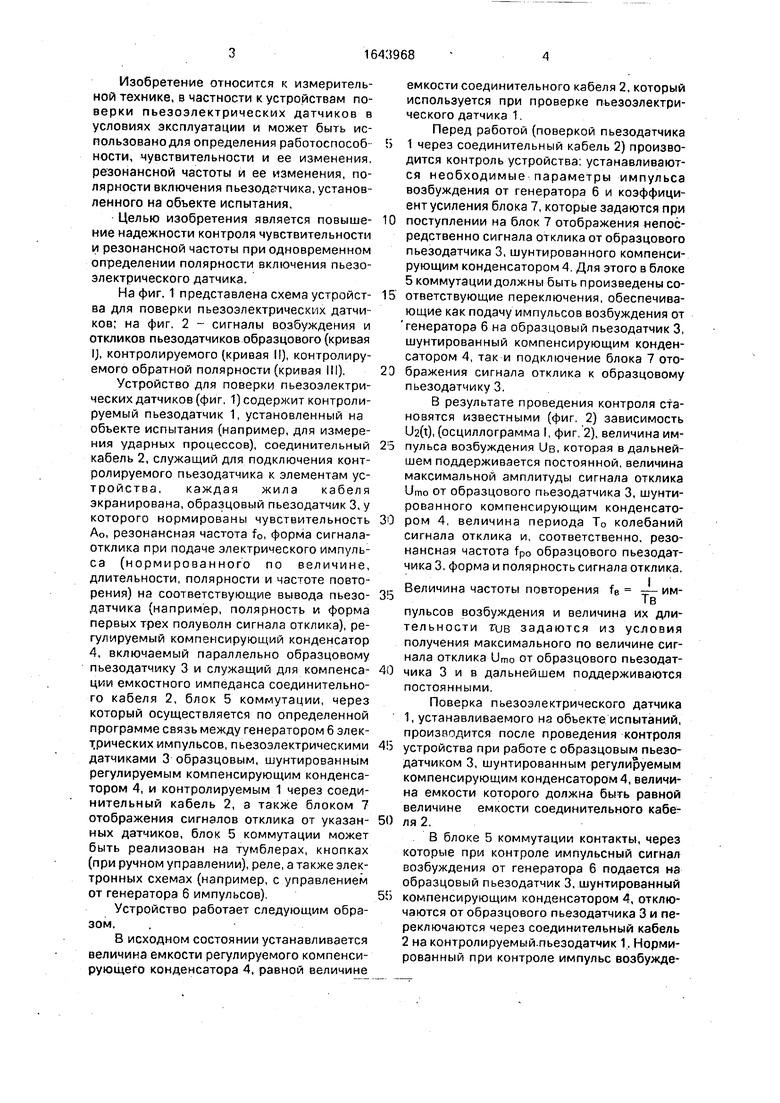


Изобретение относится к измерительной технике. Цель - повышение надежности контроля характеристик пьезоэлектрических датчиков - чувствительности, резонансной частоты и лолярности включения Устройство для поверки пьезоэлектрических датчиков содержит контролируемый пьезоэлектрический датчик 1, соединительный кабель 2, генератор 6 электрических импульсов, блок 7 отображения сигнала отклика, а также образцовый пьезоэлектрический датчик 3, регулируемый компенсирующий конденсатор 4 и блок 5 коммутации. С помощью блока 7 отображения производится как регистрация основных параметров сигнала-отклика от образцового пьезодатчика 3, шунтированного регулируемым компенсирующим конденсатором 4, и сигнала-отклика от контролируемого пьезодатчика 1 через соединительный кабель 2, так и сравнение основных параметров указанных сигналов-откликов 2 ил
О 4 СО Ч)
а оо
Фи г.1
Изобретение относится к измерительной технике, в частности к устройствам поверки пьезоэлектрических датчиков в условиях эксплуатации и может быть использовано для определения работоспособности, чувствительности и ее изменения. резонансной частоты и ее изменения, полярности включения пьезодгтчика, установленного на объекте испытания.
Целью изобретения является повышение надежности контроля чувствительности и резонансной частоты при одновременном определении полярности включения пьезоэлектрического датчика.
На фиг. 1 представлена схема устройства для поверки пьезоэлектрических датчиков; на фиг. 2 - сигналы возбуждения и откликов пьезодатчиков образцового (кривая IJ, контролируемого (кривая II), контролируемого обратной полярности (кривая III).
Устройство для поверки пьезоэлектрических датчиков (фиг. 1) содержит контролируемый пьезодатчик 1, установленный на объекте испытания (например, для измерения ударных процессов), соединительный кабель 2, служащий для подключения контролируемого пьезодатчика к элементам устройства, каждая жила кабеля экранирована, образцовый пьезодатчик 3, у которого нормированы чувствительность АО, резонансная частота f0, форма сигнала- отклика при подаче электрического импульса (нормированного по величине, длительности, полярности и частоте повторения) на соответствующие вывода пьезодатчика (например, полярность и форма первых трех полуволн сигнала отклика), регулируемый компенсирующий конденсатор 4, включаемый параллельно образцовому пьезодатчику 3 и служащий для компенсации емкостного импеданса соединительного кабеля 2, блок 5 коммутации, через который осуществляется по определенной программе связь между генератором 6 электрических импульсов, пьезоэлектрическими датчиками 3 образцовым, шунтированным регулируемым компенсирующим конденсатором 4, и контролируемым 1 через соединительный кабель 2, а также блоком 7 отображения сигналов отклика от указанных датчиков, блок 5 коммутации может быть реализован на тумблерах, кнопках (при ручном управлении), реле, а также электронных схемах (например, с управлением от генератора 6 импульсов).
Устройство работает следующим образом,
В исходном состоянии устанавливается величина емкости регулируемого компенсирующего конденсатора 4, равной величине
емкости соединительного кабеля 2, который используется при проверке пьезоэлектрического датчика 1.
Перед работой (поверкой пьезодатчика
1 через соединительный кабель 2) производится контроль устройства: устанавливаются необходимые параметры импульса возбуждения от генератора 6 и коэффициент усиления блока 7, которые задаются при
поступлении на блок 7 отображения непосредственно сигнала отклика от образцового пьезодатчика 3, шунтированного компенсирующим конденсатором 4. Для этого в блоке 5 коммутации должны быть произведены соответствующие переключения, обеспечивающие как подачу импульсов возбуждения от генератора 6 на образцовый пьезодатчик 3, шунтированный компенсирующим конденсатором 4, так и подключение блока 7 отображения сигнала отклика к образцовому пьезодатчику 3.
В результате проведения контроля становятся известными (фиг. 2) зависимость U2(t), (осциллограмма I, фиг. 2), величина импульса возбуждения UB, которая в дальнейшем поддерживается постоянной, величина максимальной амплитуды сигнала отклика Umo от образцового пьезодатчика 3, шунтированного компенсирующим конденсатором 4, величина периода Т0 колебаний сигнала отклика и, соответственно, резонансная частота fpo образцового пьезодатчика 3. форма и полярность сигнала отклика.
Величина частоты повторения fe
Тв
им0
5
0
5
пульсов возбуждения и величина их длительности TUB задаются из условия получения максимального по величине сигнала отклика Umo от образцового пьезодатчика 3 и в дальнейшем поддерживаются постоянными.
Поверка пьезоэлектрического датчика 1, устанавливаемого на объекте испытаний, производится после проведения контроля устройства при работе с образцовым пьезо- датчиком 3, шунтированным регулируемым компенсирующим конденсатором 4, величина емкости которого должна быть равной величине емкости соединительного кабеля 2.
В блоке 5 коммутации контакты, через которые при контроле импульсный сигнал возбуждения от генератора 6 подается на образцовый пьезодатчик 3, шунтированный компенсирующим конденсатором 4, отключаются от образцового пьезодатчика 3 и переключаются через соединительный кабель 2 на контролируемый.пьезодатчик 1. Нормированный при контроле импульс возбуждения от генератора 6 через соединительный кабель 2 подается на контролируемый пье- зодатчик 1 (фиг. 2, U1(t)). Калебательный сигнал отклика на резонансной частоте от контролируемого пьезодатчика 1, обусловленный обратным пьезоэффектом, малый по величине (несколько милливольт) через соединительный кабель 2 и блок 5 подается на вход блока 7 отображения сигнала отклика. Коле- бательный сигнал отклика усиливается уси- лительным каналом блока 7 отображения, регистрируется (фиг. 2, Ua(t), осциллограмма Н) и сравнивается с сигналом откликом от образцового пьезодатчика 3 (фиг. 2, U2(t), осциллограммы НИ), зарегистрированным блоком 7 отображения либо ранее, либо одновременно.
Чувствительность Ак контролируемого пьезодатчика 1 может быть определена из соотношения
UmK
Ак АО
U
то
где АО - чувствительность образцового пьезодатчика 3 (по паспортным данным, лабораторной калибровки);25
Umo - максимальная амплитуда сигнала отклика от образцового пьезодатчика 3, шунтированного компенсирующим конденсатором 4;
Отк - максимальная амплитуда сигнала 30 отклика от контролируемого пьезодатчика 1.
Резонансная частота fpK контролируемого пьезодатчика 1 может быть определена из соотношения35
fPK - f
ро
Д° Тк
где fpo - резонансная частота образцового пьезодатчика 3:
То - период колебаний сигнала отклика от образцового пьезодатчика 3;
Тк период колебаний сигнала отклика от контролируемого пьезодатчика 1.
Сравнение полярности (формы) сигналов откликов от образцового 3 и контролируемого 1 пьезодатчиков (фиг. 2, U2(t), осциллограммы I и II или I и III) позволяет одновременно определить полярность включения контролируемого пьезодатчика 1.
Формула изобретения
Устройство для поверки пьезоэлектрических датчиков, содержащее генератор электрических импульсов и блок индикации сигнала датчика, отличающееся тем, что, с целью повышения надежности контроля чувствительности, резонансной частоты и полярности включения датчика, в него дополнительно введены образцовый пьезоэлектрический датчик с параллельно подключенным к нему регулируемым компенсирующим конденсатором и коммутатор с шестью входами и двумя выходами, при этом первый и второй выходы коммутатора подключены к входам блока индикации, первый и второй его входы подключены к образцовому пьезоэлектрическому датчику, третий и четвертый - к поверяемому пьезоэлектрическому датчику, а пятый и шестой - к выводам генератора электрических импульсов, причем потенциальный вывод генератора электрических импульсов подключен к выводам одинаковой полярности поверяемого и образцового пьезоэлектрических датчиков.
(
о
l
FM
л л . Umo 7
| Устройство для проверки пьезоэлектрических датчиков | 1975 |
|
SU535478A1 |
