Изобретение относится к электротехнике, а именно к электротехническим приводам для дистанционного управления автоматическими выключателями электро- аппаратостроения.
Цель изобретения - упрощение конструкции и уменьшение габаритов.
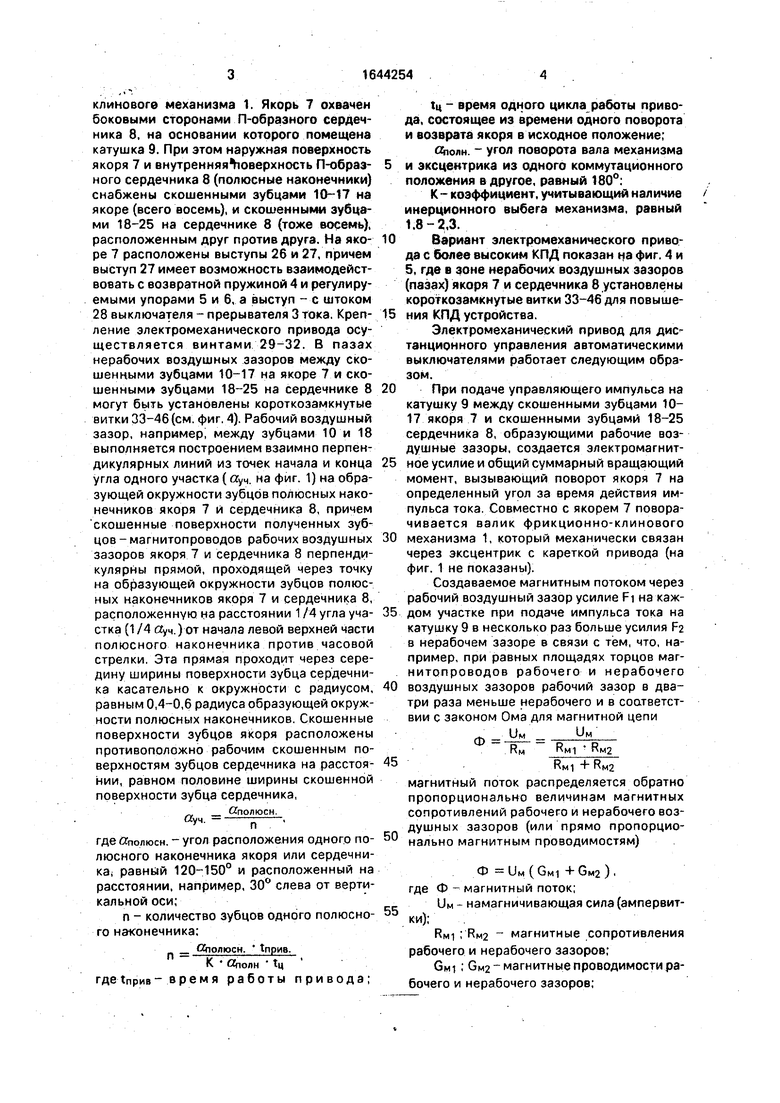
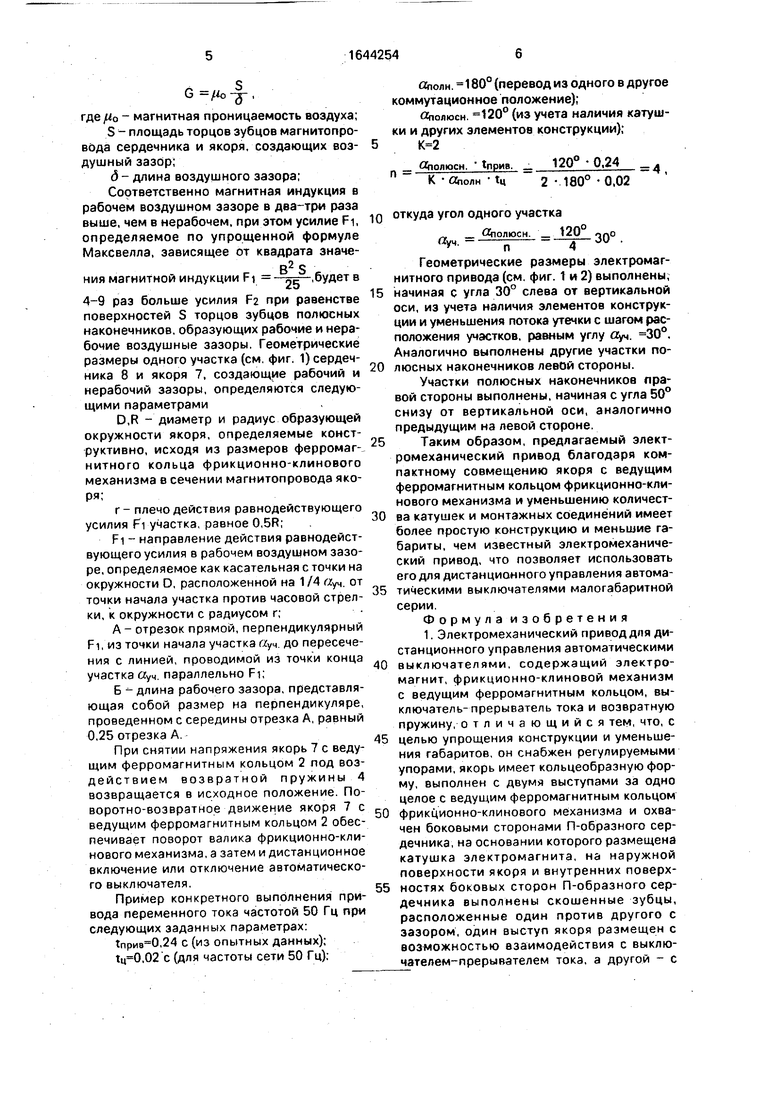
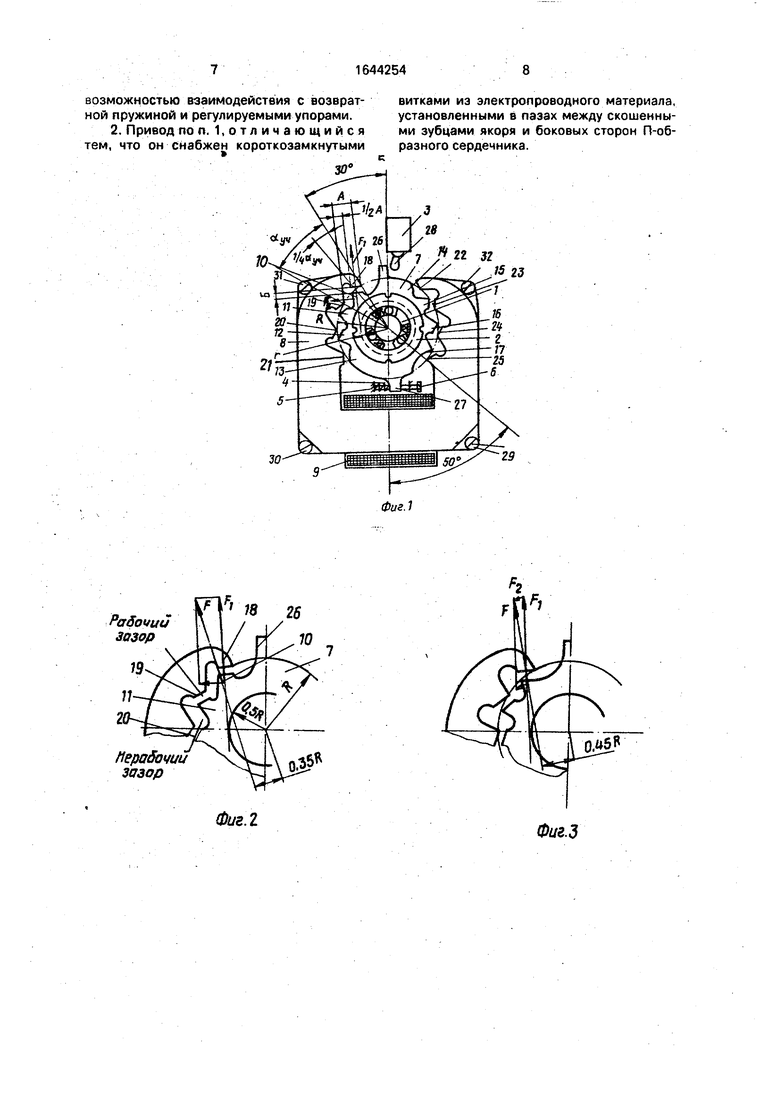
На фиг. 1 изображен предлагаемый электромеханический привод; на фиг. 2 - часть зубчатой зоны с рабочим зазором в два раза меньше нерабочего; на фиг. 3 - рабочая зона с рабочим зазором в три раза меньше нерабочего; на фиг, 4 - предлагаемый электромеханический привод с корот- козамкнутыми витками; на фиг. 5 - часть зубчатой зоны с короткозамкнутыми витками.
Электромеханический привод содержит фрикционно-клиновой механизм 1 с ве- дущим ферромагнитным кольцом 2, выключатель - прерыватель 3 и возвратную пружину 4, регулируемые упоры 5 и 6, определяющие конечное положение якоря 7, имеющего кольцеобразную форму и выполненного в виде единого узла с ведущим ферромагнитным кольцом 2 фрикционноК
Јь
ND СП Ь.
клинового механизма 1. Якорь 7 охвачен боковыми сторонами П-образного сердечника 8, на основании которого помещена катушка 9. При этом наружная поверхность якоря 7 и внутренняя юверхность П-образного сердечника 8 (полюсные наконечники) снабжены скошенными зубцами 10-17 на якоре (всего восемь), и скошенными зубцами 18-25 на сердечнике 8 (тоже восемь), расположенным друг против друга. На якоре 7 расположены выступы 26 и 27, причем выступ 27 имеет возможность взаимодействовать с возвратной пружиной 4 и регулируемыми упорами 5 и 6, а выступ - с штоком 28 выключателя - прерывателя 3 тока. Крепление электромеханического привода осуществляется винтами 29-32. В пазах нерабочих воздушных зазоров между скошенными зубцами 10-17 на якоре 7 и скошенными зубцами 18-25 на сердечнике 8 могут быть установлены короткозамкнутые витки 33-46 (см. фиг. 4). Рабочий воздушный зазор, например, между зубцами 10 и 18 выполняется построением взаимно перпендикулярных линий из точек начала и конца угла одного участка (ауч. на фиг. 1) на образующей окружности зубцов полюсных наконечников якоря 7 и сердечника 8, причем скошенные поверхности полученных зубцов-магнитопроводов рабочих воздушных зазоров якоря 7 и сердечника 8 перпендикулярны прямой, проходящей через точку на образующей окружности зубцов полюсных наконечников якоря 7 и сердечника 8, расположенную на расстоянии 1 /4 угла участка (1/4 ОуЧ.) от начала левой верхней части полюсного наконечника против часовой стрелки. Эта прямая проходит через середину ширины поверхности зубца сердечника касательно к окружности с радиусом, равным 0,4-0,6 радиуса образующей окружности полюсных наконечников. Скошенные поверхности зубцов якоря расположены противоположно рабочим скошенным поверхностям зубцов сердечника на расстоянии, равном половине ширины скошенной поверхности зубца сердечника,
.„ Сполюсн
ауч ,
где «полюсн. - угол расположения одного полюсного наконечника якоря или сердечника, равный 120-150° и расположенный на расстоянии, например, 30° слева от вертикальной оси;
п - количество зубцов одного полюсного наконечника;
ОЕполюсн. tnpna.
К &ПОЛН 1ц
где tnpnu- время работы привода;
1ц - время одного цикла работы привода, состоящее из времени одного поворота и возврата якоря в исходное положение; Счтолн. угол поворота вала механизма
и эксцентрика из одного коммутационного положения в другое, равный 180°:
К- коэффициент, учитывающий наличие инерционного выбега механизма, равный 1.8-2,3.
0 Вариант электромеханического привода с более высоким КПД показан на фиг. 4 и 5, где в зоне нерабочих воздушных зазоров (пазах) якоря 7 и сердечника 8 установлены короткозамкнутые витки 33-46 для повыше5 ния КПД устройства.
Электромеханический привод для дистанционного управления автоматическими выключателями работает следующим образом.
0 При подаче управляющего импульса на катушку 9 между скошенными зубцами 10- 17 якоря 7 и скошенными зубцами 18-25 сердечника 8, образующими рабочие воздушные зазоры, создается электромагнит5 ное усилие и общий суммарный вращающий момент, вызывающий поворот якоря 7 на определенный угол за время действия импульса тока. Совместно с якорем 7 поворачивается валик фрикционно-клинового
0 механизма 1, который механически связан через эксцентрик с кареткой привода (на фиг. 1 не показаны).
Создаваемое магнитным потоком через рабочий воздушный зазор усилие FI на каж5 дом участке при подаче импульса тока на катушку 9 в несколько раз больше усилия Fa в нерабочем зазоре в связи с тем, что, например, при равных площадях торцов магнитопроводов рабочего и нерабочего
0 воздушных зазоров рабочий зазор в два- три раза меньше нерабочего и в соответствии с законом Ома для магнитной цепи
UMUM
RMRMI Ям2
Ф
5
0
5
RMI +RM2
магнитный поток распределяется обратно пропорционально величинам магнитных сопротивлений рабочего и нерабочего воздушных зазоров (или прямо пропорционально магнитным про водим остям)
Ф UM(GMI +GM2), где Ф - магнитный поток;
DM - намагничивающая сила (ампервит- ки);
RMI ; Rn2 магнитные сопротивления рабочего и нерабочего зазоров;
GMI ; См2 - магнитные проводимости рабочего и нерабочего зазоров;
0-/Ю-1-,
где/io - магнитная проницаемость воздуха;
S - площадь торцов зубцов магнитопро- вода сердечника и якоря, создающих воздушный зазор;
д - длина воздушного зазора;
Соответственно магнитная индукция в рабочем воздушном зазоре в два-три раза выше, чем в нерабочем, при этом усилие FI, определяемое по упрощенной формуле Максвелла, зависящее от квадрата значео2 с
ния магнитной индукции FI -- .будет в
4-9 раз больше усилия Рг при равенстве поверхностей S торцов зубцов полюсных наконечников, образующих рабочие и нерабочие воздушные зазоры. Геометрические размеры одного участка (см. фиг. 1) сердечника 8 и якоря 7, создающие рабочий и нерабочий зазоры, определяются следующими параметрами
D,R - диаметр и радиус образующей окружности якоря, определяемые конструктивно, исходя из размеров ферромагнитного кольца фрикционно-клинового механизма в сечении магнитопровода якоря;
г- плечо действия равнодействующего усилия FI участка, равное 0,5R;
FI - направление действия равнодействующего усилия в рабочем воздушном зазоре, определяемое как касательная с точки на окружности D, расположенной на 1 /4 «уч. от точки начала участка против часовой стрелки, к окружности с радиусом г;
А - отрезок прямой, перпендикулярный FI, из точки начала участка ауч до пересечения с линией, проводимой из точки конца участка «уч параллельно FI;
Б - длина рабочего зазора, представляющая собой размер на перпендикуляре, проведенном с середины отрезка А, равный 0,25 отрезка А.
При снятии напряжения якорь 7 с ведущим ферромагнитным кольцом 2 под воздействием возвратной пружины 4 возвращается в исходное положение. Поворотно-возвратное движение якоря 7 с ведущим ферромагнитным кольцом 2 обеспечивает поворот валика фрикционно-клинового механизма, а затем и дистанционное включение или отключение автоматического выключателя.
Пример конкретного выполнения привода переменного тока частотой 50 Гц при следующих заданных параметрах:
1прив 0,24 с (из опытных данных);
,02 с (для частоты сети 50 Гц);
Ополн.180° (перевод из одного в другое коммутационное положение);
Опояюсн. 120° (из учета наличия катушки и других элементов конструкции);
ОпОЛЮСН. tnpMB.
К Ополн 1ц
120° 0.24 я
ч Щ (
2 180° 0,02
откуда угол одного участка
Ополюсн. 120 4
«уч. -
30°
Геометрические размеры электромагнитного привода (см. фиг. 1 и 2) выполнены,
начиная с угла 30° слева от вертикальной оси, из учета наличия элементов конструкции и уменьшения потока утечки с шагом расположения участков, равным углу Оуч. 30°, Аналогично выполнены другие участки полюсных наконечников левой стороны.
Участки полюсных наконечников правой стороны выполнены, начиная с угла 50° снизу от вертикальной оси, аналогично предыдущим на левой стороне.
Таким образом, предлагаемый электромеханический привод благодаря компактному совмещению якоря с ведущим ферромагнитным кольцом фрикционно-клинового механизма и уменьшению количества катушек и монтажных соединений имеет более простую конструкцию и меньшие габариты, чем известный электромеханический привод, что позволяет использовать его для дистанционного управления автоматическими выключателями малогабаритной серии.
Формула изобретения 1. Электромеханический привод для дистанционного управления автоматическими
выключателями, содержащий электромагнит, фрикционно-клиновой механизм с ведущим ферромагнитным кольцом, выключатель-прерыватель тока и возвратную пружину, отличающийся тем, что, с
целью упрощения конструкции и уменьшения габаритов, он снабжен регулируемыми упорами, якорь имеет кольцеобразную форму, выполнен с двумя выступами за одно целое с ведущим ферромагнитным кольцом
фрикционно-клинового механизма и охвачен боковыми сторонами П-образного сердечника, на основании которого размещена катушка электромагнита, на наружной поверхности якоря и внутренних поверхностях боковых сторон П-образного сердечника выполнены скошенные зубцы, расположенные один против другого с зазором, один выступ якоря размещен с возможностью взаимодействия с выключателем-прерывателем тока, а другой - с
возможностью взаимодействия с возвратной пружиной и регулируемыми упорами. 2, Привод по п. 1,отличающийся
тем, что он снабжен короткозамкнутыми
витками из электропроводного материала, установленными в пазах между скошенными зубцами якоря и боковых сторон П-об- разного сердечника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический привод | 1989 |
|
SU1707644A1 |
| Малогабаритный электромеханический привод | 1991 |
|
SU1787290A3 |
| Устройство для виброперемешивания жидкостей | 1990 |
|
SU1754198A1 |
| Линейный электрический двигатель | 1978 |
|
SU792510A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2098909C1 |
| Моментный электродвигатель постоянного тока | 1981 |
|
SU978281A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ЭЛЕКТРОМАГНИТ | 1971 |
|
SU301747A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| МНОГОПОЛЮСНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1989 |
|
RU2008757C1 |

Изобретения относится к электротехнике. Целью изобретения является упрощение конструкции и уменьшение габаритов привода. Электромеханический привод содержит электромагнит, фрикционно-клиновой механизм (ФКМ) 1 с ведущим ферромагнитным кольцом 2, выключатель-прерыватель 3 тока, возвратную пружину 4 и регулируемые упоры 5 и 6. Якорь (Я) 7 имеет кольцеобразную форму, выполнен в виде единого узла с ведущим ферромагнитным кольцом 2 ФКМ 1 и охвачен боковыми сторонами П-об- разного сердечника 8, на основании которого помещена катушка 9. Наружная поверхность Я 7 и внутренняя поверхность П-образного сердечника 8 снабжены скошенными зубцами 10-17 и 18-25 соответственно, расположенными один против другого. На Я 7 выполнены два выступа 26 и 27, причем выступ 27 может взаимодействовать с возвратной пружиной 4 и регулируемыми упорами 5 и 6, а выступ 26 - со штоком 28 выключателя-прерывателя 3 тока. Поворотно-возвратное движение Я 7 с ведущим ферромагнитным кольцом 2 обеспечивает поворот валика ФКМ 1, а затем и дистанционное включение или отключение автоматического выключателя. 1 з. п. ф-лы, 5 ил. (Л С
30
Рабочий зазор
19
HF; 26
П
Нерабочий зазор
Фиг.2
Фиг.З
W itB 39
45
Фиг. ft
ft P
