Изобретение относится к области робототехники, а более конкретно к электромеханическим манипуляторам промышленных роботов преимущественно с внешними магнитными системами.
Цель изобретения - расширение технологических возможностей за счет увеличения рабочей зоны.
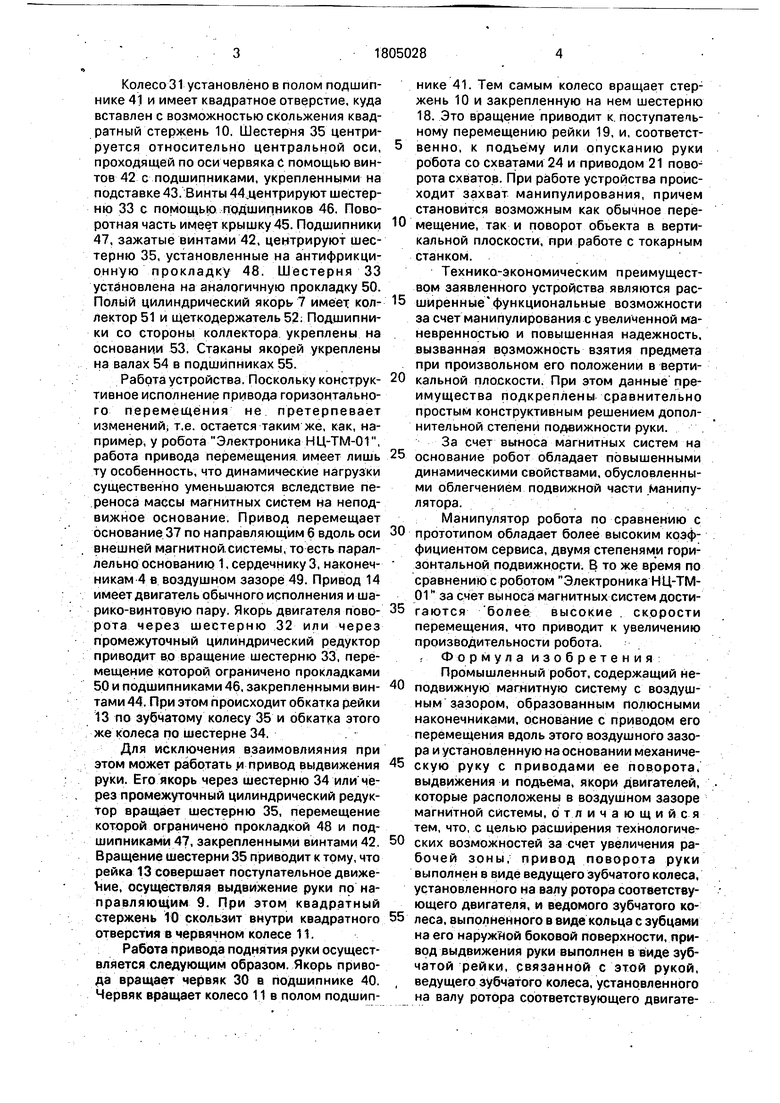
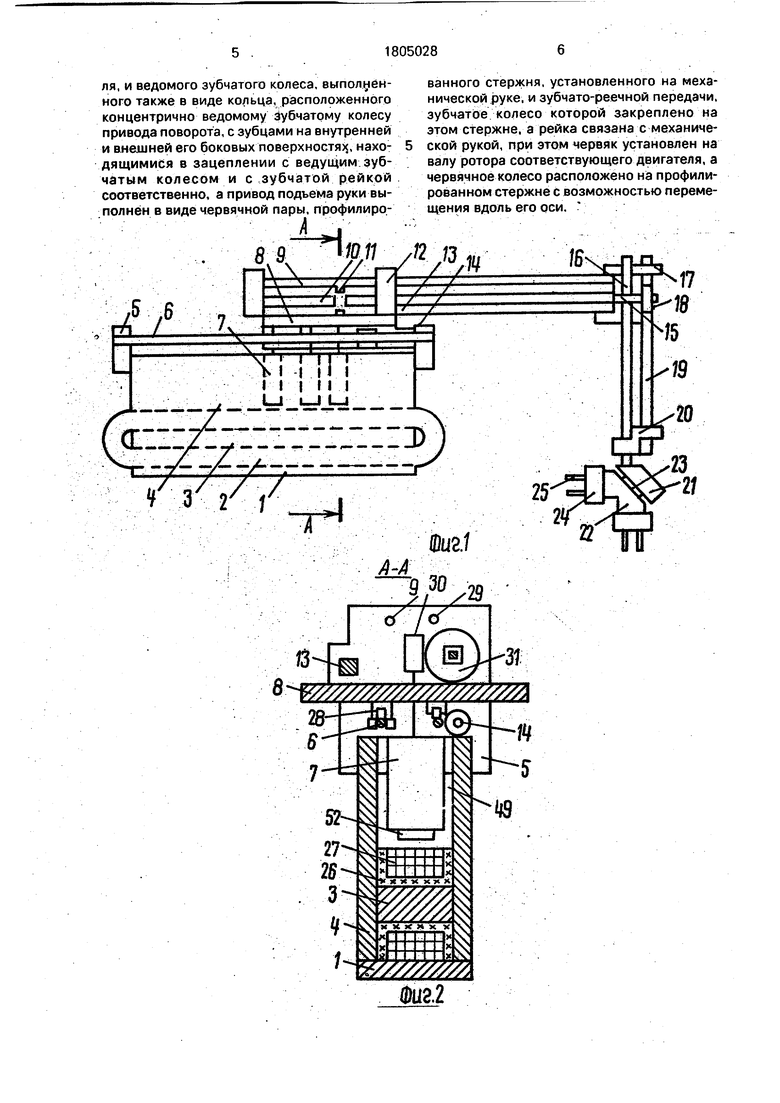
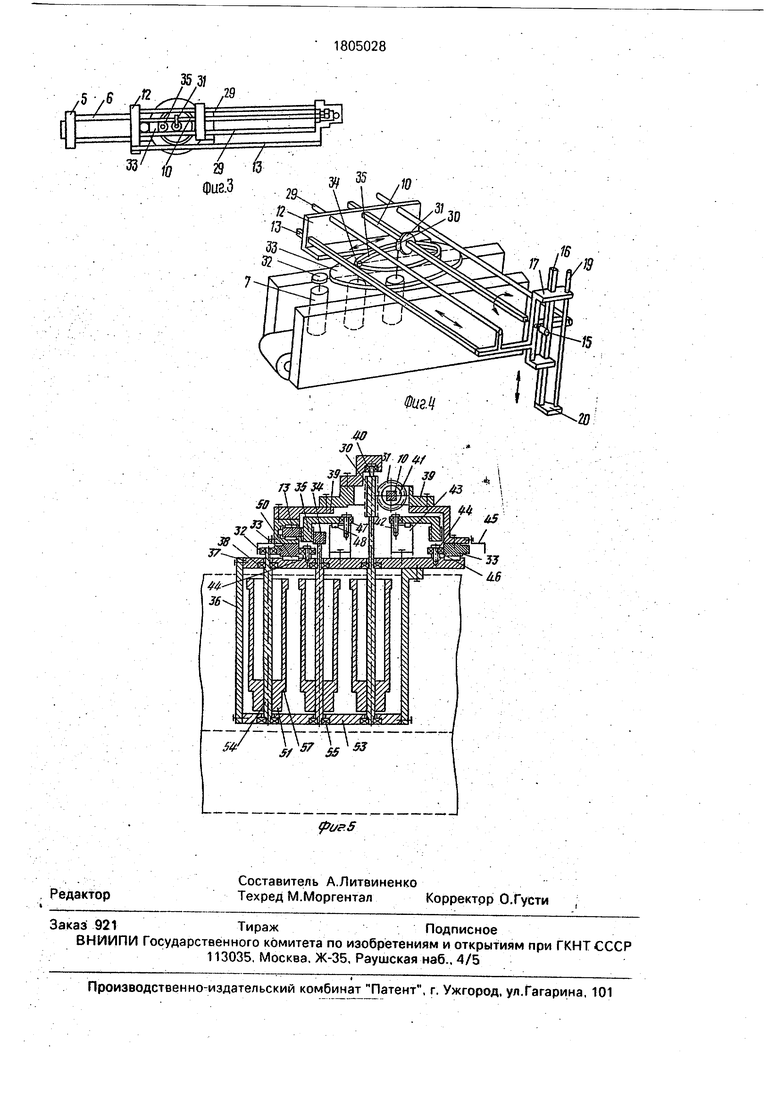
На фиг.1 показан робот, вид в вертикальной плоскости; на фиг.2 - разрез А-А на фиг.1; на фиг.З - то же, вид сверху; на фиг.4 - пространственная кинематическая схема; на фиг.5 - узел якорей приводов.
Робот состоит из основания 1, катушки 2 с сердечником 3 и полюсными наконечниками 4. На них размещены узлы крепления 5 цилиндрических направляющих 6. В воздушном зазоре 49 располагаются якори 7 приводов поворота, выдвижения и подъема. Все эти приводы установлены на основании 8. Имеются направляющие 9, на которых закреплен узел руки, квадратный стержень 10, пропущенный через отверстие в червячном редукторе (колесе) 11. Направляющие пропущены через подшипники в стойках 12. Узел руки прикреплен к рейке 13 привода выдвижения. Привод 14 предназначен для горизонтального перемещения блока якорей 7 по направляющим 6. На руке установлен подшипник 18. Вертикальная часть руки
снабжена направляющей 19, проходящей через верхнюю обойму 17. Шестерня 15 контактирует с рейкой 16, жестко закрепленной в нижнем кронштейне 20 руки. На нем же закреплен привод 21 поворота схватов, укрепленных на основании 22 относительно оси 23. На основании укреплены схваты 24 с губками 25. Катушка 2 образована каркасом 26 и обмоткой 27. С направляющей 6 контактируют подшипники 28. К основанию 8 крепятся направляющие 29.
На валу якоря привода подъема закреплен червяк 30, контактирующий с червячным колесом 31. На валу .привода поворота закреплена шестерня 32, входящая в зацепление с венцовой кольцеобразной шестерню 33, служащей основанием для остальных механизмов. На валу привода выдвижения закреплена шестерня 34. Она уходит в зацепление с кольцеобразной шестернью 35, зубцы на которую нанесены и на внешнюю и на внутреннюю стороны. Блок якорей имеет боковые немагнитные планки 36, основание 37, якори укреплены в подшипниках 38. На шестерне 33 установлены крепежные элементы 39, которые поддерживают рейку 13 и червячный редуктор привода выдвижения. Такой же элемент поддерживает-и подшипник 40 червяка 30.
ел
с
со о
СП
о
N) 00
Колесо 31 установлено в полом подшипнике 41 и имеет квадратное отверстие, куда вставлен с возможностью скольжения квадратный стержень 10. Шестерня 35 центрируется относительно центральной оси, проходящей по оси червяка с помощью винтов 42 с подшипниками, укрепленными на подставке 43. Винты 44 центрируют шестерню 33 с помощью подшипников 46. Поворотная часть имеет крышку 45. Подшипники 47, зажатые винтами 42, центрируют шестерню 35, установленные на антифрикционную прокладку 48. Шестерня 33 установлена на аналогичную прокладку 50. Полый цилиндрический якорь- 7 имеет коллектор 51 и щеткодержатель 52. Подшипники со стороны коллектора укреплены на основании 53. Стаканы якорей укреплены на валах 54 в подшипниках 55.
Работа устройства. Поскольку конструктивное исполнение привода горизонтального перемещения не. претерпевает изменений, т.е. остается таким же, как, например, у робота Электроника НЦ-ТМ-01, работа привода перемещения имеет лишь ту особенность, что динамические нагрузки существенно уменьшаются вследствие переноса массы магнитных систем на неподвижное основание. Привод перемещает основание 37 по направляющим 6 вдоль оси внешней магнитнойхистемы, то есть параллельно основанию 1,сердечнику 3,наконечникам 4 в воздушном зазоре 49. Привод 14 имеет двигатель обычного исполнения и ша- рико-винтовую пару. Якорь двигателя поворота через шестерню 32 или через промежуточный цилиндрический редуктор приводит во вращение шестерню 33, перемещение которой ограничено прокладками 50 и подшипниками 46, закрепленными винтами 44. При этом происходит обкатка рейки 13 по зубчатому колесу 35 и обкатка этого же колеса по шестерне 34.
Для исключения взаимовлияния при этом может работать и привод выдвижения руки. Его якорь через шестерню 34 или через промежуточный цилиндрический редуктор вращает шестерню 35, перемещение которой ограничено прокладкой 48 и подшипниками 47, закрепленными винтами 42, Вращение шестерни 35 приводит к тому, что рейка 13 совершает поступательное движе- Vwe, осуществляя выдвижение руки по направляющим 9, При этом квадратный стержень 10 скользит внутри квадратного отверстия в червячном колесе 11.
Работа привода поднятия руки осуществляется следующим образом. Якорь привода вращает червяк 30 в подшипнике 40. Червяк вращает колесо 11 в полом подшипнике 41. Тем самым колесо вращает стержень 10 и закрепленную на нем шестерню 18. Это вращение приводит к. поступатепь- ному перемещению рейки 19, и, соответственно, к подъему или опусканию руки робота со схватами 24 и приводом 21 поворота схватов. При работе устройства происходит захват манипулирования, причем становится возможным как обычное пере0 мещение, так и поворот объекта в вертикальной плоскости, при работе с токарным станком.
Технико-экономическим преимуществом заявленного устройства являются рас5 ширенные функциональные возможности за счет манипулирования с увеличенной маневренностью и повышенная надежность, вызванная возможность взятия предмета при произвольном его положении в верти0 кальной плоскости. При этом данные преимущества подкреплены сравнительно простым конструктивным решением дополнительной степени подвижности руки.
За счет выноса магнитных систем на
5 основание робот обладает повышенными динамическими свойствами, обусловленными облегчением подвижной части манипулятора.
Манипулятор робота по сравнению с
0 прототипом обладает более высоким коэффициентом сервиса, двумя степенями горизонтальной подвижности. В то же время по сравнению с роботом Электроника НЦ-ТМ- 01 за счет выноса магнитных систем дости5 гаются более высокие . скорости перемещения, что приводит к увеличению производительности робота. , Формула изобретения
Промышленный робот, содержащий не0 подвижную магнитную систему с воздушным зазором, образованным полюсными наконечниками, основание с приводом его перемещения вдоль этого воздушного зазора и установленную на основании механиче5 скую руку с приводами ее поворота, выдвижения и подъема, якори двигателей, которые расположены в воздушном зазоре магнитной системы, отличающийся тем, что, с целью расширения технологиче0 ских возможностей за счет увеличения рабочей зоны, привод поворота руки выполнен в виде ведущего зубчатого колеса, установленного на валу ротора соответствующего двигателя, и ведомого зубчатого ко5 леса, выполненного в виде кольца с зубцами на его наружной боковой поверхности, привод выдвижения руки выполнен в виде зубчатой рейки, связанной с этой рукой, , ведущего зубчатого колеса, установленного на валу ротора соответствующего двигателя, и ведомого зубчатого колеса, выполненного также в виде кольца, расположенного концентрично ведомому зубчатому колесу привода поворота, с зубцами на внутренней и внешней его боковых поверхностях, находящимися в зацеплении с ведущим зубчатым колесом и с зубчатой рейкой соответственно, а привод подъема руки выполнен в виде червячной пары, профилироА
ванного стержня, установленного на механической руке, и зубчато-реечной передачи, зубчатое колесо которой закреплено на этом стержне, а рейка связана с механической рукой, при этом червяк установлен на валу ротора соответствующего двигателя, а червячное колесо расположено на профилированном стержне с возможностью перемещения вдоль его оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Манипулятор | 1987 |
|
SU1414625A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| ПРИВОД РОБОТА | 2003 |
|
RU2248269C1 |
Сущность изобретения: с целью уменьшения массы и габаритов подвижных частей робота якори приводов поворота, выдвижения и подъема руки робота установлены в воздушном зазоре, образованном полюсными наконечниками, неподвижно закрепленной на основании магнитной системы. 5 ил.
ffluaf
22
2
/25
Фиг.2
Я 10 . 29 13
фиг.З
3V /«г
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
