Изобретение относится к способам отбора проб грунта дна водного бассейна.
Целью изобретения является расширение эксплуатационных возможностей способа путем использования в условиях сложно построенных геологических структур дна водного бассейна. .
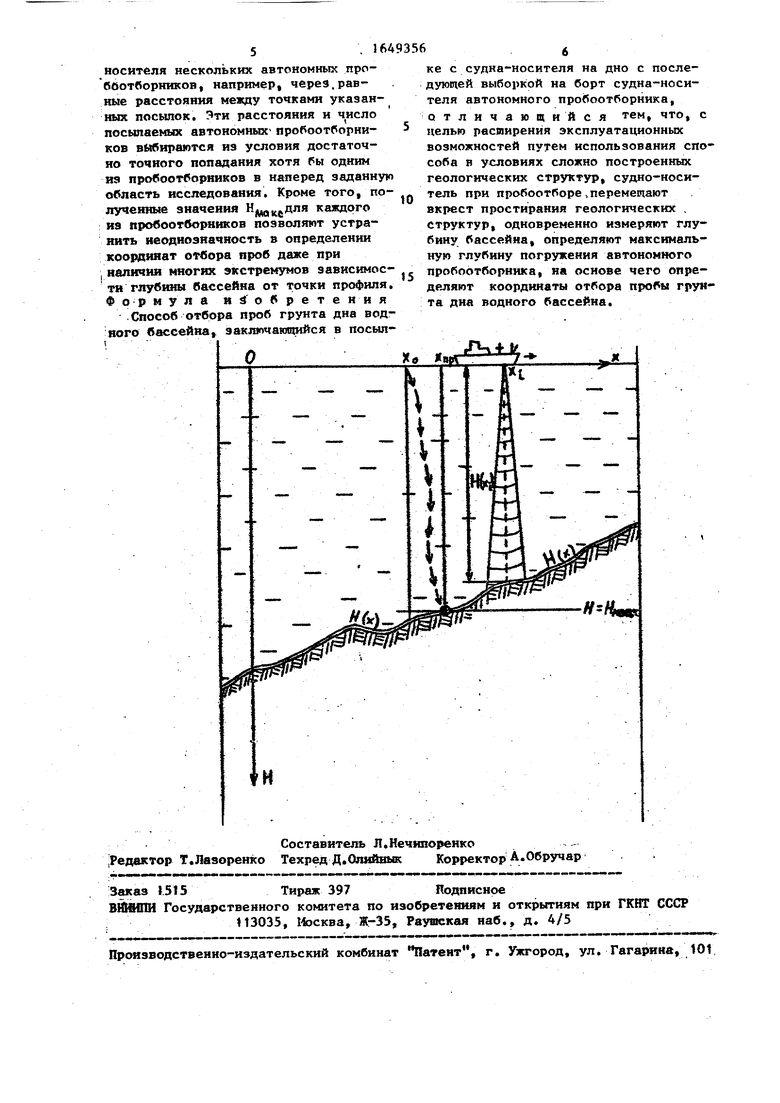
На чертеже показана схема реализации способа.
Сущность изобретения заключается в использовании факта малой изменчивости характера пород на поверхности сложнопостроенных геологических структур вдоль их простирания. 1 Это позволяет при проведении профиля наблюдений вирест простирания геологических структур при намерении глубины водного бассейна вдоль простирания профиля и глубины дтбора пробы грунта осуществить надежную привязку точки отбора пробы грунта относительно геологической структуры.
Перемещение судна-носителя по линейному профилю Ох вкрест простирания геологических структур яри измерении зависимости глубины бассейна К от точки профиля х необходимо для определения возможных значений глубины отбора проб в привязке их к точкам профиля Ох. Дополнительное определение максимальной глубины погружения КдаЈ.автономного пробоотборника необходимо для определения координаты х0р отбора пробы грунта дна водного бассейна, которая определяется по абсциссе пересечения графяков (x)
Для осуществления способа автономный пробоотборник необходимо до- оснастить датчиком максимального статического давления, сами же пробоотборники могут быть любыми известными.
Операции осуществления способа следующие:
1.Судно выводят в наперед заданную акваторию Мирового океана.
2.Определяют азимут простирания геологических структур дна Мирового океана на указанной акватории
3.Перемещают судно-носитель вдоль прямолинейного профиля Ох перпенднкулярно указанному азимуту простирания геологических структур дна Мирового океана
4.Одновременно с операцией 3 измеряют Н(х) - зависимость от точки х профиля Ох глубины бассейна И.
5.При подходе судна-носителя в точку профиля xft (для которой Н (х0) равна, например, предполагаемой глубине пробоотвора) с судна-носителя посыпают автономный пробоотборник, который в автономном режиме совершает погружение в водной толще, при- донеяие с отбором пробы и измерением максимальной глубины погружения Кр„Ю7после чего автономный пробоотборник сбрасывает бадласт .и всплы0
5
0
5
0
5
0
0
5
5
вает на поверхность океана за счет силы положительной плавучести его без балласта.
6,Судно-носитель после достижения указанной точки профиля хв перемещают далее вдоль профиля Ох на расстояние, равное максимуму возможного сноса автономного пробоотборника с продолжением выполнения операции 4, после чего переводят судно- носитель в режим ожидания всплывшего автономного пробоотборника.
7,Всплывший пробоотборник поднимают на борт судна-носителя в определяют по показанию датчика максимального давления глубину отбора HMe4,
8.-Находят корень х, системы из двух уравнений К - Н(Хд.);
. « - «маке и принимают х п„ за координату отббра пробы дна водного бассейна.
Операции 1, 3, 5, 6 обеспечиваются ютатннм навигационным оборудованием, которым укомплектованы все на- учно-исследовательские суда.
Для обеспечения операции 2 судно-носитель перемещают по площадной системе галсов с проведением, например, непрерывного сейсмического профилирования, в результате чего строятся временные сейсмические разрезы, на основе которых определяют азимуты простирания геологических структур.
Операцию 4 осуществляют посредством указанного непрерывного сейсмического профилирования или ттатно- го эхолотнрования,
Операции 5, 7 обеспечиваются те- ми же средствами, что и в случае прототипа.
Кдааксв операции 5 определяют посредством закрепления на автономном пробоотборнике датчика максимального давления.
Предложенный способ отбора проб грунта дна водного бассейна позволяет по сравнению с прототипом получать достаточно достоверную информацию о местоположении точек отбора указанных проб, позволяет использовать автономные пробоотборники в условиях сложно построенных геологических структур на дне водного бас- сейва.
Наиболее целесообразным является при этом посылка на дно с суднаносителя нескольких автономных пробоотборников, например, через.равные расстояния между точками указанных посыпок. Эти расстояния и число посылаемых автономных1 пробоотборников выбираются из условия достаточно точного попадания хотя бы одним из пробоотборников в наперед заданную область исследования. Кроме того, полученные значения каждого из пробоотборников позволяют устранить неоднозначность в определении координат отбора проб даже при наличии многих экстремумов зависимости глубины бассейна от точки профиля. Формула изобретения
Способ отбора проб грунта дна водного бассейнаt заключающийся в посыл
ке с судна-носителя на дно с последующей выборкой на борт судна-носителя автономного пробоотборника, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем использования способа в условиях сложно построенных геологических структур, судно-носитель при пробоотборе,перемещают вкрест простирания геологических структур, одновременно измеряют глубину бассейна, определяют максимальную глубину погружения автономного пробоотборника, на основе чего определяют координаты отбора пробы грунта дна водного бассейна.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отбора проб грунта дна водного бассейна | 1989 |
|
SU1661617A1 |
| Гравитационный пробоотборник и способ его использования | 2022 |
|
RU2795338C1 |
| Автономный самовсплывающий пробоотборник | 1982 |
|
SU1084648A1 |
| Донный пробоотборник | 1989 |
|
SU1636715A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| Автономный пробоотборник | 1980 |
|
SU917044A1 |
| Способ оценки возраста и состава пород осадочных бассейнов в арктическом регионе | 2024 |
|
RU2835972C1 |
| Пробоотборник для изучения процессов седиментации в придонном слое океана | 1988 |
|
SU1624306A1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| Автономный пробоотборник | 1979 |
|
SU851164A1 |
Изобретение относятся к способам отбора проб грунта дна водного бассейна. Цель изобретения - расширение эксплуатационных возможностей за счет использования способа в условиях построенных геологических структур. Судно выводят в заданную акваторию Мирового океана, определяют азимут простирания геологических структур дна Мирового океана на указанной акватории, перемещают судно-носитель вдоль прямолинейного профиля, перпен дикулярного указанному азимуту про- етирания геологических структур дна Мирового океана, одновременно измеряют профиль глубины бассейна, при подходе судна-носителя в точку профиля, глубина которой равна, например, предполагаемой глубине пробо- отбора, с судна-носителя посылают автономный пробоотборник, который в автономном режиме совершает погружение в водной толше, придонение с отбором пробы и измерением максимальной глубины погружения, после чего автономный пробоотборник сбра сывает балласт и всплывает на поверхность океана за счет силы положительной его плавучести без балласта Судно-носитель после достижения указанной точки профиля перемещают далее вдоль прямолинейного профиля на расстояние, равное максимуму возможного сноса автономного пробоотборника с продолжением измерения профиля бассейна, после чего переводят судно-носитель в режим ожидания всплывшего автономного пробоотборника. Всплывший пробоотборник поднимают на борт судна-носителя и определяют по показанию датчика максимального давления глубину отбора. Из полученных данных определяют координату отбора пробы грунта дна водного бассейна. 1 ил. Јь 03 Сп О
JV+fr
| Лукошков А.В | |||
| Техника исследования морского дна | |||
| Л,: Судостроение, 1984 с | |||
| Железнодорожный снегоочиститель | 1920 |
|
SU264A1 |
| Контарь Е.А | |||
| Самовспяывающие системы для геолого-геофизических исследований океана, М.: Наука, 1984, с/152. | |||
