Изобретение относится к способам от- - бора проб грунта дна водного бассейна.
Целью изобретения является расширение эксплуатационных возможностей способа за счет использования в условиях сложно построенных геологоразведочных структур дна водного бассейна,
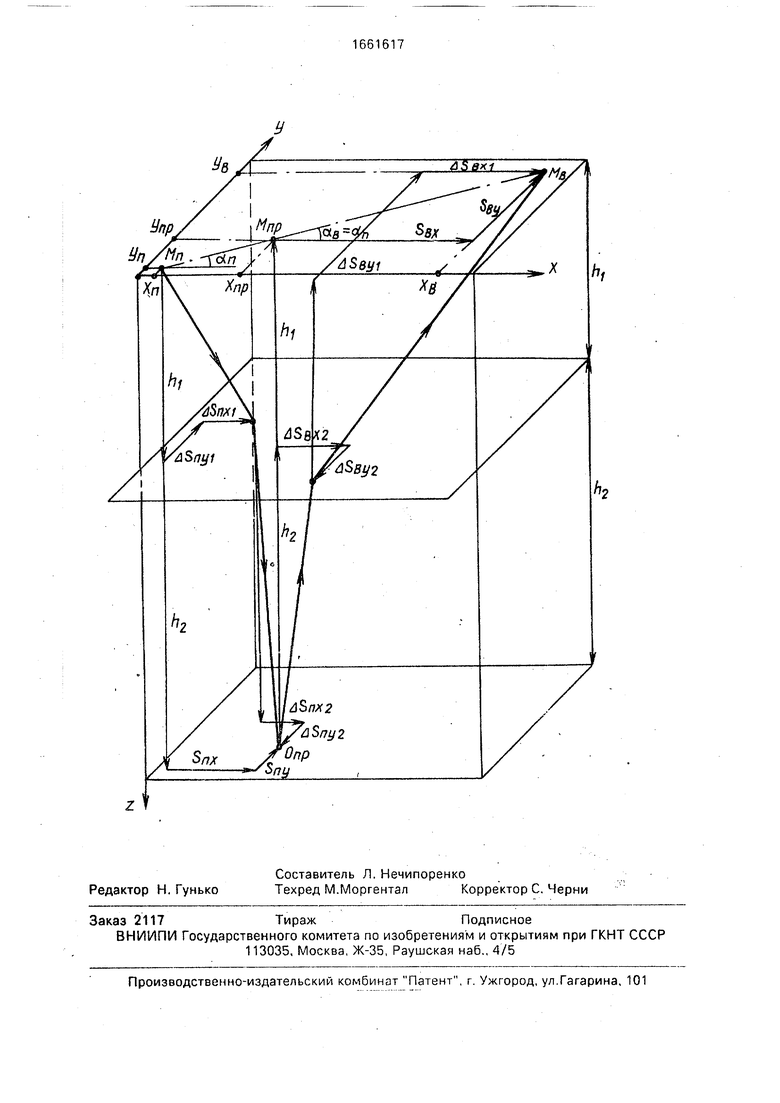
На чертеже представлена система координат OXYZ и расположенные относительно нее точки пробоотборника 0Пр и ее проекция МПр.
Сущность изобретения заключается в том, что (как будет показано ниже) проекция МПр на поверхность водного бассейна точки пробоотбора Опр лежит на прямой, соедине- няющей точки посылки Мп и всплытия Мв пробоотборника, При этом длины отрезков
МпМцр и МпрМв относятся друг к другу обратно пропорционально отношению скоростей погружения и всплытия. Использование указанного факта позволяет резко повысить точность определения координат точки пробоотбора, что обуславливает возможность использования предлагаемого способа в случае сложнопостроенных геологических структур дна водного бассейна.
Определяют горизонтальные координаты точки пробоотбора, исходя из зависимости;
(Хпр - Xp)Vn (Хв - Xnp)Vs;
Vn(Ynp-Yn) (YB-YnP)VB,(1)
где Xn, Yn. Xnp, Ynp, XB, YB горизонтальные декартовые координаты точек посылки
о ,
a
Ј
пробоотборника, пробоотбора и всплытия пробоотборника;
Vn и VB - скорости погружения и всплытия пробоотборника.
При глубине бассейна 6 км процесс пробоотбора вместе со спуском и подъемом пробоотборника длится не более 2 - 4 ч. За это время скорость течения практически остается без изменений. Для определенности зададимся N-слойной моделью водного бассейна, каждый j-й слой которого мощностью hj- постоянные горизонтальные составляющие Vxj и VYJ океанического течения.
При погружении со скоростью Vn пробоотборник преодолевает J-й слой за время
Vn
За это время пробоотборник сносится течением вдоль соответствующих осей на расстояния
Jl
Vn hj
Vxj;
TT- VYJ,
Vn
откуда суммарные значения компонент сноса составляют
N
I
Snx ту- S hVxj, vnj 1
N
I
,,
суммарный угол сноса пробоотборника при пйгружении его на дно составит:
а п arctg
SnV SnX
N
arctg (( g hj VY)/( 2 hj Vxj)).
J iJ l
Производя аналогичные выкладки для всплывающего пробоотборника, получаем, что суммарные угол сноса пробоотборника при его всплытии а в «п, т.е. проекция МПр точки пробоотбора 0Пр на поверхность водного бассейна лежит на прямой, соединяющей точки посылки Мп и всплытия Мв пробоотборника. При этом отношение Snx к суммарной компоненте SBX сноса пробоот
борника вдоль оси ОХ при его всплытия составляет:
SnX Ув SBX Vn
что эквивалентно записи, приведенной в формуле. Аналогично получаем:
SBY Vn
В реальных условиях расстояние между точками посылки пробоотборника и его всплытия не превышает 2-4 км. Это позволяет даже в зоне расположения синоптического вихря, когда вектор скорости приповерхностных слоев водной толщи меняется как по амплитуде, так и по направлению в зависимости от координаты, иметь погрешность определения координат точки пробоотборника не более 50 - 100 м, что вполне достаточно для решения большинства геологоразведочных задач.
Для использования зависимостей (1) необходимым является определение входящих в нее параметров Vn, VB, Хп, Yn, XB и YB. При этом VB зависит от массы и плотности пробы грунта и может быть определена только после подъема пробоотборника.
Способ реализуется посредством следующей последовательности операций.
Предварительно определяют скорость погружения Vn автономного донного пробоотборника. Судно-носитель выводят в наперед заданную акваторию Мирового океана. В. точке Мп производят посылку пробоотборника при определении координат этой посылки Xn.Yn. Судно-носитель переводят в режим наблюдения за водной поверхностью на предмет обнаружения всплывшего пробоотборника. При этом пробоотборник в автономном режиме совершает погружение в водной толще, пробоотбор грунта дна водного бассейна и всплытие на водную поверхность. С судна-носителя засекают координаты всплывшего пробоотборника Хв, YB. Пробоотборник поднимают на борт судна-носителя. Определяют скоро- 0 Сть всплытия VB пробоотборника. Определяют координаты пробоотбора:
Хпр
Ynp
ХпУп + ХВУВ Vn + VB
YnVn + YBVB Vn + VB
Определение скорости прогружения проводят на мелководье посредством построения графика зависимости скорости погружения Vn пробоотборника от его подводного веса или подводного веса балласта. Для этого, например, к верху пробоотборника прикрепляют конец троса, который с незначительным натягом вытравливают при посылке пробоотборника при переборе подводного веса балласта Рбк. При этом секундомером измеряют время вытравливания Т центрального участка троса (ограниченного метками) заданной длины L, после чего строят график, определяют точки Vmc 1-/Т(Рбк) графика Vn Vn (Рб). при посылке пробоотборника, задаваясь подводным весом балласта Ре, по указанному графику определяют Vn.
После всплытия пробоотборника измеряют массу m и обьем V отобранной пробы грунта, после чего определяют подводный вес этой пробы по формуле
Рпр mg - /cfeVg,
где g - ускорение силы тяжести;
РЪ - плотность воды.
После этого по графику VB (Рпр), который может быть получен, например, аналогично графику Vn (Рб), находят искомую скорость всплытия VB пробоотборника.
Способ отбора проб грунта дна водного бассейна позволяет по сравнению с прототипом получать достаточно достоверную информацию о местоположении точек отбора указанных проб, что в отличие от прототипа позволяет использовать автономные пробоотборники в условиях сложно построенных геологических структур на дне водного бассейна.
Наиболее целесообразным является при этом посылка на дно с судна-носителя площадной системы из нескольких автономных пробоотборников, например, через равные расстояния между точками указанных посылок. Эти расстояния и число посылаемых автономных пробоотборников выбираются, соответственно, из условия до- статочно точного попадания хотя бы одним из пробоотборников в наперед заданную область исследования.
Формула изобретения
Способ отбора проб грунта дна водного бассейна, заключающийся в посылке с судна-носителя на дно автономного донного пробоотборника с последующей выборкой
его на борт судна-носителя после всплытия, отличающийся тем, что, с целью расширения эксплуатационных качеств за счет возможности использования в условиях сложно построенных геологических
структур, предварительно измеряют скорость погружения автономного донного пробоотборника, при посылке пробоотборника с судна-носителя определяют координаты места посылки, а после всплытия пробоотборника определяют координаты точки его всплытия и скорость всплытия, на основе чего определяют координаты пробоотбора, исходя из соотношений
Хпр Ynp -
ХпУп + ХВУВ Vn + VB
YnVn + YBVB Vn + VB
где ХПр, Ynp - координаты пробоотборника;
Xn, Yn - координаты посылки;
Хв, YB - координаты всплытия; Vn - скорость погружения пробоотборника;
VB - скорость всплытия пробоотборника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отбора проб грунта дна водного бассейна | 1989 |
|
SU1649356A1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ДОННЫЙ ТРАЛОУСТОЙЧИВЫЙ АВТОНОМНЫЙ ГИДРОАКУСТИЧЕСКИЙ МОДУЛЬ | 2010 |
|
RU2481594C2 |
| Способ определения параметров потока открытого русла | 1989 |
|
SU1752848A1 |
| Пробоотборник для изучения процессов седиментации в придонном слое океана | 1988 |
|
SU1624306A1 |
| Пробоотборник | 1977 |
|
SU673887A2 |
| Автономный пробоотборник-дночерпатель | 1980 |
|
SU1057795A1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
Изобретение относится к способам отбора проб грунта водного бассейна. Цель изобретения - расширение эксплуатационных возможностей за счет использования в условиях сложнопостроенных геологических структур. Способ реализуется посредством следующей последовательности операций. Предварительно определяют скорость погружения Vп автономного донного пробоотборника (АДП), судно-носитель выводят в наперед заданную акваторию Мирового океана, в точке Mп производят посылку пробоотборника при определении координат этой точки Xп, Yп, судно-носитель переводят в режим наблюдения за водной поверхностью на предмет обнаружения всплывшего АДП. При этом АДП в автономном режиме совершает погружение в водной толще, пробоотбор грунта дна водного бассейна и всплытие на водную поверхность, с судна-носителя засекают координаты всплывшего АДП Xв, Yв, АДП поднимают на борт судна-носителя, определяют скорость всплытия VВ АДП, определяют координаты пробоотбора Xпр = XпVп + XвVв/Vп + Vв, Yпр = YпVп + YвVв/Vп + Vв. 1 ил.
| Лукошков А.В | |||
| Техника исследования морского дна | |||
| Л.: Судостроение, 1984 | |||
| Контарь Е.А | |||
| Самовсплывающие системы для геолого-геофизических исследований океана | |||
| - М.: Наука, 1984, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
