Изобретение относится к измерительной технике и может быть использовано при градуировке низкочастотных высокочувствительных преобразователей.
Цель изобретения - повышение точности градуировки путем исключения погрешности, обусловленной наклонами вибростола.
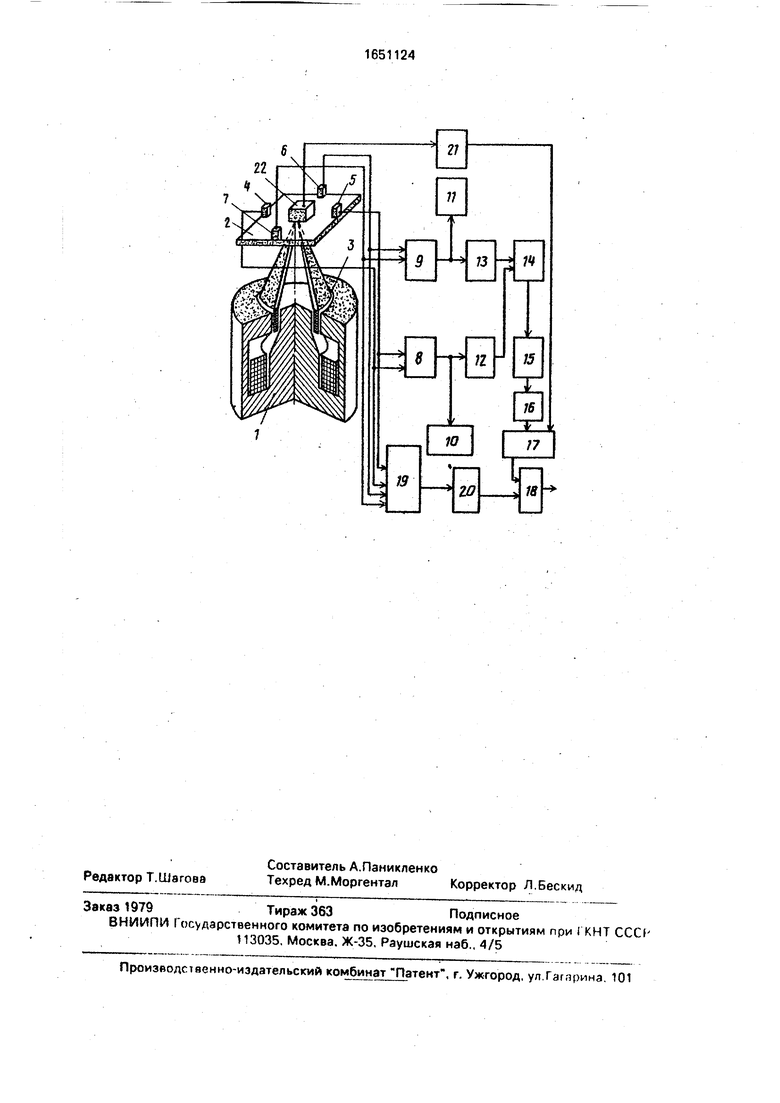
На чертеже представлена блок-схема электродинамического градуировочного преобразователя.
Электродинамический градуировочный преобразователь содержит магнитопровод 1 с обмоткой подмагничивэния, вибростол 2, подвижную катушку 3, установленную в воздушном зазоре магнитопровода 1 и связанную с вибростолом 2. задающий генератор /на чертеже не показан/, подключенный к подвижной катушке 3, четыре измерителя 4-7 перемещений, установленных на вибростоле 2 в плоскости,
перпендикулярной направлению его движения, равноудаленных от оси подвижной катушки и размещенных на взаимно перпендикулярных осях, первый дифференциальный усилитель 8, входы которого соединены с противоположно установленными измерителями 4, 5 перемещений, второй дифференциальный усилитель 9, входы которого соединены с измерителями 6, 7 перемещений, первый и второй индикаторы 10. 11 разбаланса дифференциальных усилителей, входы которых подключены к их выходам, первый и второй квадраторы 12 и 13, входы которых соединены с выходами первого и второго дифференциальных усилителей 8, 9, последовательно соединенные первый сумматор 14, входы которого соединены с выходами первого и второго квадраторов 12, 13, масштабирующий усилитель 15, первый амплитудный детектор 16, третий дифференциальный усилитель 17 и деО
ел
ю
ь
литель 18, второй сумматор 19, входы которого соединены с измерителями перемещений 4-7, второй амплитудный детектор 20, вход которого соединен с выходом второго сумматора 20, а выход - с вторым входом делителя 18, и третий амплитудный детектор 21, вход которого предназначен для подключения градуируемого вибропреобразователя 22, а выход соединен с вторым входом третьего дифференциального усилителя 17.
Электродинамический градуировочный вибростенд работает следующим образом.
Сигналы с измерителей 4-7 одновременно поступают на вход двух измерительных каналов: канала измерения амплитуды колебательного перемещения вибростола, состоящего из второго сумматора 19 и второго амплитудного детектора 20, и канала измерения амплитуды ускорения, обусловленного наклонами вибростола, состоящего из первого и второго дифференциальных усилителей 8, 9, индикаторов разбаланса 10,11, первого и второго квадраторов 12,13, первого сумматора 14, масштабирующего усилителя 15 и первого амплитудного детектора 16. Градуируемый вибропреочбразова- тель 17 размещают на поверхности вибростола 2, которому задают возвратно- поступательные движения. При зтом с помощью измерителей перемещений 4-7 контролируют колебательные перемещения четырех независимых точек стола, равноудаленных от оси его движения. Среднее арифметическое значение выходных сигналов измерителей перемещений 4-7 вычисляются сумматором 19, далее сигнал подается на вход амплитудного детектора 20. Выходной сигнал амплитудного детектора 20 пропорционален амплитуде колебательных перемещений вибростола 2. Но вибростол 2 из-за наличия гибких связей с магнитопроводом 1, при своих перемещениях, кроме поступательных, совершает также наклонные движения, которые, благодаря принципу эквивалентности инерционного и гравитационного воздействия на вибропреобразователь 17 приводят к появлению на его выходе сигналов, не связанных однозначно с задаваемыми на его входе колебательными перемещениями, т.е. к погрешности градуировки. Поэтому в целях контроля характера движения поверхности вибростола сигналы с противоположно размещенных измерителей перемещений 4,5 и б, 7 вычитаются друг из друга в дифференциальных усилителях 8 и 9 соответственно. В результате сигналы на выходе усилителей 8 и 9 пропорциональны разности перемещений противоположных точек вибростола
и характеризуют величины наклона его плоскости относительно осей, перпендикулярных линиям, соединяющим соответствующие измерители. Например, выходной сигнал усилителя 8 пропорционален углу поворота плоскости вибростола относительно оси, проходящей через измерители 6 и 7, при этом знак выходного сигнала определяется направлением наклона. Величины выходных
0 напряжений усилителей 8, 9 регистрируются индикаторами разбаланса 10,11, а также поступают на входы квадраторов 12 и 13. Показания индикаторов разбаланса 10, 11 используют для статической балансировки
5 вибростола 2 после размещения на нем градуируемого вибропреобразователя 22. Размещение вибропреобразователей, в частности сейсмических, масса которых может достигать 70 кг, приводит к появлению
0 в подвижной системе опрокидывающих моментов, которые, проявляются в виде наклонов поверхности вибростола 2. Для устранения этих статических наклонов преобразователь 17 перемещается по поверх5 ности вибростола 2 до тех пор. пока не найдет то положение, в котором его воздействие на подвижную систему вибростенда минимально. Перемещение происходит последовательно вдоль осей, соединяющих
0 противоположно размещенные измерители до тех пор, пока показания индикаторов разбаланса не обнулятся. После выполнения операции статической балансировки вибростолу задают колебательное движе5 ние, а в дальнейшем измерения производятся в динамическом режиме. При этом в динамическом режиме оценивается модуль величины ускорения, облуслоаленной наклонами поверхности вибррстола во время
0 движения. Это обеспечивается тем, что каждый из сигналов с дифференциальных усилителей возводится в квадрат квадраторами 12,13, затем полученные значения суммируются сумматором 14, Полученный сигнал ум5 ножается на масштабный коэффициент, после чего выполняется операция выделения амплитуды сигнала, осуществляемая амплитудным детектором 16. В результате выходной сигнал с амплитудного детектора
0 16 пропорционален амплитуде ускорения, обусловленного наклонами поверхности вибростола 2. Выходной сигнал с амплитудного детектора 21 пропорционален амплитуде ускорения, регистрируемого
5 градуируемым вибропреобразователем 22. которая является суммой нескольких слагаемых; ускорения, обусловленного колебательными движением акол, ускорения, обусловленного наклонами поверхности вибростола знак, и ускорения, обусловленk -
ного вибрационными и сейсмическими помехами апом. Первое слагаемое является полезным сигналом, а остальные являются помехой, не связанной однозначно с задаваемым вибпропреобразователю входным воздействием, присутствие которой снижает точность градуировки. Если b - задаваемое входное воздействие, амплитуда которого регистрируется с помощью измерителей перемещений 4-7, сумматора 19 и амплитудного детектора 20, то коэффициент преобразования вибропреобразователя 17 определяется выражением I Экол I
1Ы
при этом погрешность б определения коэффициента преобразования (погрешность градуировки) можна оценить из выражения
А -, анак + Г А 4-А, ° 1Ы 1Ы°1 °2
Путем вычитания из выходного сигнала амплитудного детектора 21, пропорционального регистрируемому вибропреобразователем 17 ускорению, сигнала с выхода амплитудного детектора 16, пропорционального амплитуде Знак, компенсируется первая составляющая погрешности, которая обусловлена наклонами поверхности, кото- вибростола что существенно повышает точность градуировки. Операция вычитания осуществляется дифференциальным усилителем 17. При этом сигнал, пропорциональный коэффициенту преобразования градуируемого вибропреобразователя 22, снимается с выхода делителя 18, на вход делимого /первый вход/ которого поступает сигнал с выхода дифференциального усилителя 17, а на вход делителя /второй вход/ - сигнал с выхода амплитудного детектора 20.
Таким образом, предлагаемый электродинамический градуировочный вибростенд позволяет повысить точность градуировки вибропреобразователя путем исключения составляющей погрешности, связанной с наклонами поверхности вибростола. Дополнительным преимуществом предлагаемого вибростенда является возможность проведения и контроля балансировки вибростола в статическом режиме, что также снижает
погрешность градуировки при задании виб-- ростолу колебательных движений. Операция статической балансировки вибростола производится при каждой смене вибропре обраэователя.
Формула изобретения Электродинамический градуировочный вибростенд, содержащий магнитопровод с
обмоткой подмагничивания, вибростол, подвижную катушку, установленную в воздушном зазоре магнитопровода и связанную с вибростолом, задающий генератор, подключенный к подвижной катушке, и измеритель
перемещений вибростола, отличающий- с я тем, что, с целью повышения точности градуировки вибропреобразователя путем исключения погрешности, обусловленной наклонами вибростолэ, он снабжен тремя
измерителями перемещений вибростола, все измерители перемещения установлены на вибростоле в плоскости, перпендикулярной направлению его движения, равноудалены от оси подвижной катушки и
размещены на взаимно перпендикулярных осях, первым и вторым дифференциальными усилителями, входы которых соединены с измерителями перемещений, первым и вторым индикаторами разбаланса дифференциальных усилителей, входы которых подключены к их выходам , первым и вторым квадраторами, входы которых соединены1 с выходами первого и второго дифференциальных усилителей, последовательно соединенными первым сумматором, входы которого соединены с выходами пер- вогс и второго квадраторов, масштабирующим усилителем, первым амплитудным детектором, третьим дифференциальным
усилителем и делителем, вторым сумматором, входы которого соединены со всеми измерителями перемещений, вторым амплитудным детектором, вход которого соединен с выходом второго сумматора, а выход
- с вторым входом делителя, и третьим амплитудным детектором, вход которого предназначен для подключения градуируемого вибропреобразователя, а выход соединен с вторым входом третьего дифференциального усилителя.


| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный градуировочный вибростенд | 1989 |
|
SU1627875A2 |
| Способ градуировки вертикальных акселерометров | 1988 |
|
SU1569729A1 |
| Горизонтальный вибростенд | 1988 |
|
SU1620945A1 |
| Вертикальный градуировочный вибростенд | 1987 |
|
SU1455252A1 |
| Устройство для виброиспытаний | 1989 |
|
SU1657998A1 |
| Способ градуировки преобразователя энергии фотонного излучения | 1979 |
|
SU795191A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЯ НА ВИБРОПРОЧНОСТЬ | 1991 |
|
RU2025688C1 |
| Способ динамический градуировки датчиков термоанемометров и устройство для его осуществления | 1987 |
|
SU1620942A1 |
| Устройство для градуировки электроакустических преобразователей | 2020 |
|
RU2782354C2 |
| Измеритель линейных перемещений | 2015 |
|
RU2624844C2 |
Изобретение относится к измерительной технике, в частности к средствам поверки и градуировки виброизмерительных преобразователей. Цель изобретения - повышение точности градуировки путем исключения погрешности, обусловленной наклонами вибростола. Это достигается тем, что измерение параметров движения вибростола осуществляется в четырех точках измерителямиперемещений, установленными на вибростоле в плоскости, перпендикулярной направлению его движения, равноудаленными от оси подвижной катушки и размещенными на взаимно перпендикулярных осях. Из зарегистрированных сигналов формируется сигнал, обусловленный наклонами вибростола, и сигнал, характеризующий уровень колебаний. Первый из этих сигналов вычитается из сигнала, снимаемого с градуируемого вибропреобразователя, что повышает точность градуировки. 1 ил.
| Устройство для вибрационного контроля изделий | 1982 |
|
SU1073593A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
