Изобретение относится к измерительной технике, в частности к методам и средствам аттестации и градуировки низкочатотных высокочувствительных вертикальных акселерометров.
Целью изобретения является повыше- ние точности градуировки путем уменьшения в результирующем сигнале градуируемого акселерометра составляющих, обусловленных фоновыми вертикальными вибрационными шумами.
На чертеже приведена блок-схема устройства для осуществления предлагаемого способа.
Устройство состоит из каркаса 1 , в котором размещена рабочая платформа 2 с горизонтальной осью 3 колебаний, На платформе 2.размещены градуируемый акселерометр 4 так, что его измерительная ось располагается перпендикулярно оси 3, и самоориентирующийся вертикальный акселерометр 5,не чувствительный к поворотам вокруг оси 3. Причем самоориентирующийся акселерометр 5 размещен так, что центр масс его чувствительного элемента находим на оси 3 колебаний платформы 2. Ориентация платформы 2, т.е. поворот ее на фиксированный угол, и гармонические колебания вокруг оси 3 обеспечиваются путем подачи соответствующего входного напряжения на катушку 6 возбуждения, магнитное поле которой, взаимодействуя с сердечником 7, вызывает его перемещение вдоль оси катушки 6, а следовательно, и поворот платформы 2, с которой он связан посредством штока 8. Шток 8 связан также через пружину 9 с каркасом 1 и снабжен измерителем 10 углов, регистрирующим отклонения штока 8, а следовательно , и измерительной оси градуируемого акселерометра 4 от вертикали 11.
Выходы градуировочного 4 и самоориентирующегося 5 акселерометров подключены к прямому и инвертирующему входам дифференциального усилите0 ля 12. Причем канал самоориентирующегося акселерометра 5 снабжен регулятором 13 коэффициента усиления. Выход усилителя 12 подключен к входу измерителя 14 напряжений. Каркас 1
5 размещен на вибраторе 15, способном задавать ему вертикальные колебания на частоте градуировки акселерометра 4.
Пример. После размещения на
0 платформе 2 градуируемого 4 и самоориентирующегося 5 акселерометров ее отклоняют на фиксированный уголрС, подавая в катушку 6 соответствующее постоянное напряжение. Затем с по, мощью вибратора 15 задают каркасу 1, а следовательно, и платформе 2 с акселераторами 4 и 5 вертикальные колебания на частоте градуировки. При этом на выходах акселерометров 4
Q и 5 появляются электрические сигналы, поступающие на входы дифференциального усилителя 12. Регулируя коэффициент усиления у самоориентирующегося акселерометра 5 с помощью регулятое ра 13, добиваются равенства выходного напряжения у него и градуируемого акселерометра 4, контролируя напряжение на выходе дифференциального усилителя 12 (подстраивая регулятор 13 и наблюдая значение напряжения на выходе усилителя 12 с помощью измерителя 14, добиваются его минимального значения). Затем отключают вибратор 15 и задают рабочей платформе 2 угловые колебаний вокруг оси 3, пода5 Вая переменное напряжение в катушку 6. Одновременно проводят измерения амплитуды угловых колебаний платформы 2 с помощью измерителя 10 углов и
0
51
разности выходных напряжений с градуируемого 4 и самоориентирующегося акселерометров с помощью измерителя 14 напряжения. Благодаря включению в измерительную схему самоориен- тирующегося вертикального акселеромера 5, выходной сигнал с которого определяется только вертикально направленными виброколебаниями, а наклоны около центра масс его чувствительног элемента не вызывают генерации электрических сигналов, результирующий выходной сигнал с усилителя 12 очищается от составляющих, обусловленных фоновыми вертикальными вибрациями, т.е. из выходного напряжения градуируемого акселерометра 4 при угловых колебаниях платформы 2, воспринимающего как паразитные вертикальные вибрации, так и градуировочные угловые колебания, вычитают сигнал с самоориентирующегося акселерометра 5, который воспринимает только паразитные вертикальные вибрации, причем уровень его выходного напряжения от этих воздействий равен уровню вибрационной составляющей, наводимой на градуировочном акселерометре. Благодаря вычитанию вибрационной составляющей в результирующем сигнале (на выходе усилителя 12) присутствует только информация о градуировочныхвоздействиях. Это позволяет снижать уровни входных градуировочныхвоздействий до требуемых значений, при этом погрешность измерения выходного сигнала, очищенного от неинформативных составляющих, не возрастает, следовательно, не возрастет и погрешность градуировки.
Используя измеренное значение разности выходных напряжений с акселерометров 4 и 5, определяют коэффициенты
продольного К и поперечного Кп преобразования градуируемого акселерометра. Для чего разностный выходной сигнал с усилителя 12 подвергают спектральному разложению и по значениям уровней первой и второй гармоник определяют К и Кп из выражений
4CT.Llf°C.)
V/u I d)
- ускорение свободного падения;
cJ - первоначальный угол отклонения измерительной оси акселерометра от вертикали; амплитуда угловых колебаний платформы; амплитуды первой и второй гармоник напряжения на выходе дифференциального усилителя соответственно. - Формула изобретения
V иС215
5
0
5
0
5
1. Способ градуировки вертикальных акселерометров, заключающийся в том, что градуируемый акселерометр размещают на рабочей платформе с горизонтальной осью угловых колебаний, измерительную ось градуируемого акселерометра ориентируют перпендикуляр- 20 но оси угловых колебаний платформы, затем отклоняют измерительную ось градуируемого акселерометра от вертикали на фиксированный угол и задают градуируемому акселерометру входной сигнал путем гармоническогого изменения ориентации его измерительной оси относительно вектора гравитационного поля при колебаниях рабочей платформы, отличающийся тем, v что, с целью повышения точности градуировки путем уменьшения в результирующем сигнале градуируемого акселе- рометра составляющих,обусловленных фоновыми вертикальными вибрационными шумами перед заданием градуируемому ., акселерометру, входного сигнала на рабочей платформе дополнительно размещают самоориентирующийся вертикальный акселерометр с центром масс чувствительного элемента, расположенным на оси угловых колебаний платформы, задают платформе вертикальные колебания на частоте градуировки, регулируя при этом коэффициент преобразования по каналу самоориентирующегося акселерометра, добиваются равенства выходных напряжений у градуируемого и самоориентирующегося акселерометров, после чего отключают вертикальные колебаний, а затем измеряют разность выходных напряжений с акселерометров и по ней определяют коэффициент преобразования градуируемого акселерометра.
2. Способ по п.1, отличающий с я тем, что величины фиксированного угла отклонения и амплитуды гармонических угловых колебаний не превышают 0,1 рад.
5
0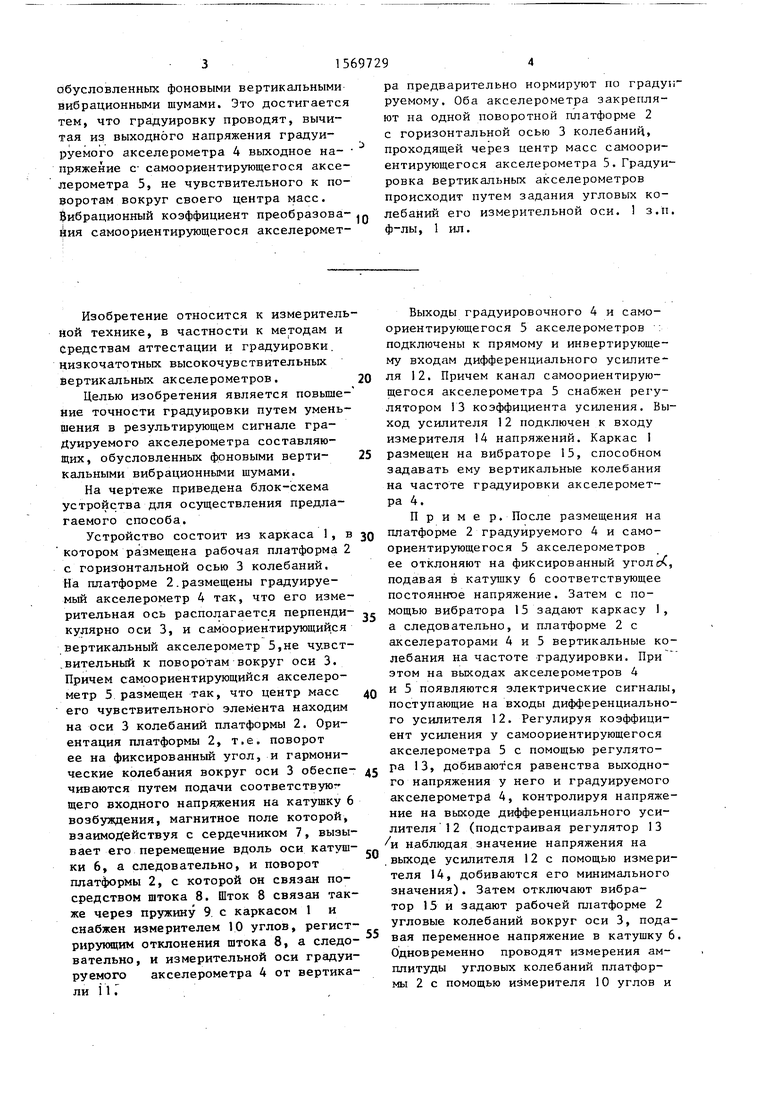
| название | год | авторы | номер документа |
|---|---|---|---|
| Горизонтальный вибростенд | 1988 |
|
SU1620945A1 |
| Электродинамический градуировочный вибростенд | 1989 |
|
SU1651124A1 |
| Способ градуировки вертикальных акселерометров | 1989 |
|
SU1742734A1 |
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ СРЕДСТВ ИЗМЕРЕНИЙ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2010236C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И ПОВОРОТНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184979C1 |
| Устройство для динамической градуировки ударного акселерометра | 1982 |
|
SU1015312A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ГРАДУИРОВКИ ЭЛЕКТРОМАГНИТНЫХ АМПЕРМЕТРОВ | 1996 |
|
RU2121155C1 |
Изобретение относится к измерительной технике. Целью изобретения является обеспечение градуировки с высокой точностью при малых фиксированных углах отклонения и малых уровнях входных воздействий путем уменьшения в результирующем сигнале градуируемого акселерометра составляющих, обусловленных фоновыми вертикальными вибрационными шумами. Это достигается тем, что градуировку проводят, вычитая из выходного напряжения градуируемого акселерометра 4 выходное напряжение с самоориентирующегося акселерометра 5, не чувствительного к поворотам вокруг своего центра масс. Вибрационный коэффициент преобразования самоориентирующегося акселерометра предварительно нормируют по градуируемому. Оба акселерометра закрепляют на одной поворотной платформе 2 с горизонтальной осью 3 колебаний, проходящей через центр масс самоориентирующегося акселерометра 5. Градуировка вертикальных акселерометров происходит путем задания угловых колебаний его измерительной оси. 1 з.п. ф-лы, 1 ил.
| Приборы и системы для измерения вибрации,шума и удара | |||
| Справочник./ Под ред.В.В.Клюева, кн.1 | |||
| -М.: Машиностроение, 1978, с.448 | |||
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
