го, в устройстве особым образом выполнены блоки 15, 26 и 7. В устройстве перед началом работы выполняется калибровка нуля и крутизны. Для этого блок 7 вырабатывает управляющие импульсы. Коммутатор 3 по очереди подает на преобразователь 10 нулевое напряжение и эталонное напряжение с источника 1. При этом включаются соответственно блоки 14 и 15 и осущестр- ляется установка на их выходах кодов, обеспечивающих на выходе преобразователя 10 соответственно нулевую частоту и частоту, равную эталонной частоте на первом выходе делителя 28. 2 з.п. ф-лы, 7 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-импульсное устройство преобразования сигнала с мостового датчика | 1986 |
|
SU1383474A1 |
| Преобразователь переменного напряжения в код | 1989 |
|
SU1621178A1 |
| Счетчик эектроэнергии | 1983 |
|
SU1190280A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Измерительный преобразователь электрической энергии постоянного тока | 1986 |
|
SU1352386A1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2001 |
|
RU2187824C1 |
| Интегрирующий преобразователь частоты следования импульсов в код | 1981 |
|
SU961140A1 |
| Устройство для формирования импульсов | 1984 |
|
SU1205273A1 |
| Формирователь трапецеидальных импульсов | 1982 |
|
SU1077045A1 |
| Устройство для измерения погрешности цифро-аналоговых преобразователей | 1982 |
|
SU1112546A1 |
Изобретение относится к импульсной технике и может быть использовано в информационно-измерительных систе . Цель изобретения - повышение быстродействия при одновременном улучшении точности и помехоустойчивости. Для достижения цели в устройство, содержащее источник 1 эталонного сигнала, усилитель 2, коммутатор 3, элемент ИЛИ-НЕ 4, блок 7 управления, преобразователь 10 напряжение - частота, резисторы 11, 12, 18, источник 13 опорного напряжения, блоки 14, 15 формирования корректирующих кодов крутизны и нуля, ИДЛ 16, 17, элементы II 19, 22, 23, блок 26 допускового контроля калибровки, генератор 27 импульсов опорной частоты, введены делитель 28 частоты, блок 30 вычитания частот, элемент И 31, резистор 32 и новые функциональные связи. Кроме тоi 1(Л сг СП го & ь
Изобретение относится к импульсной технике и может быть использовано в информационно-измерительных системах.
Цель изобретения - повышение быстродействия при одновременном улучшении точности и помехоустойчивости.
На йиг.1 приведена структурная схема устройства; на фиг.2 - структурная схема блока формирования корректирующего кода крутизны; на фиг.З - структурная схема блока контроля ка- либровки на фиг.4 - структурная схема блока управления; на фиг.5-7 - временные диаграммы работы устройства.
Устройство содержит источник 1 эталонного сигнала, подключенный к входу усилителя 2 через коммутатор 3, управляющий вход которого с.оединен с выходом элемента ИЛИ-НЕ 4, шину 5 Автоматический режим, шину 6 сигнала контроля. Выход элемента ИЛИ-НЕ 4 подключен к первому и второму выходам блока 7 управления, первый вход которого связан с шиной 8 Калибровка, а второй вход с шиной 9 Измерение. Преобразователь 10 напряжение - частота подключен своим первым входом через первый резистор 11 к выходу усилителя 2, а вторым входом через второй резистор 12 к источнику 13 опорного напряжения. Устройство содержит также блоки 14 и 15 формирования корректирующего кода нуля и крутизны, ДАЛ 16 коррекции крутизны, ДАЛ 17 коррекции нуля, выход которого через третий резистор 18 подключен к первому входу преобразователя 10, выход которого связан с первым входом первого элемента И 19, подключенного вторым входом к первому выходу 5 блока 7, а выходом - к выходной шине 20, второй и третий элементы И 21 и 22, подключенные первыми входами к выходу инвертора 23, вход которого под5
0
5
0
5
0
5
0
5
ключей к первому выходу 5 блока 7, вторыми входами соответственно к третьему и четвертому выходам блока 7, а выходами - к входам блоков 14 и 15 соответственно. Импульсный выход преобразователя 10 присоединен к третьему входу второго элемента И 22, а выход знака - к управляющему входу блока 14.
Кроме того, устройство содержит входную шину 24, дополнительный коммутатор 25, блок 26 допускового контроля, выход которого соединен с шиной 6 и третьим входом блока 7, генератор 27 импульсов опорной частоты, выход которого соединен с входом делителя 28 частоты, датчик 29, блок 30 вычитания частот. Первый, второй и третий входы блока 26 соединены соответственно с вторым выходом блока 30, пятым выходом блока 7 и вторым выходом делителя 28. Первый вход блока 30 подключен к импульсному выходу преобразователя 10, второй вход - к выходу четвертого элемента И 31, подключенного своим первым входом к первому выходу делителя 28, а вторым входом - к выходу элемента ИЛИ-НЕ 4; импульсный выход блока 30 подключен к третьему входу третьего элемента И 22, выход знака - к первому входу блока 15, а выход ДАЛ 16 крутизны через четвертый резистор 32 связан с вторым входом преобразователя 10,
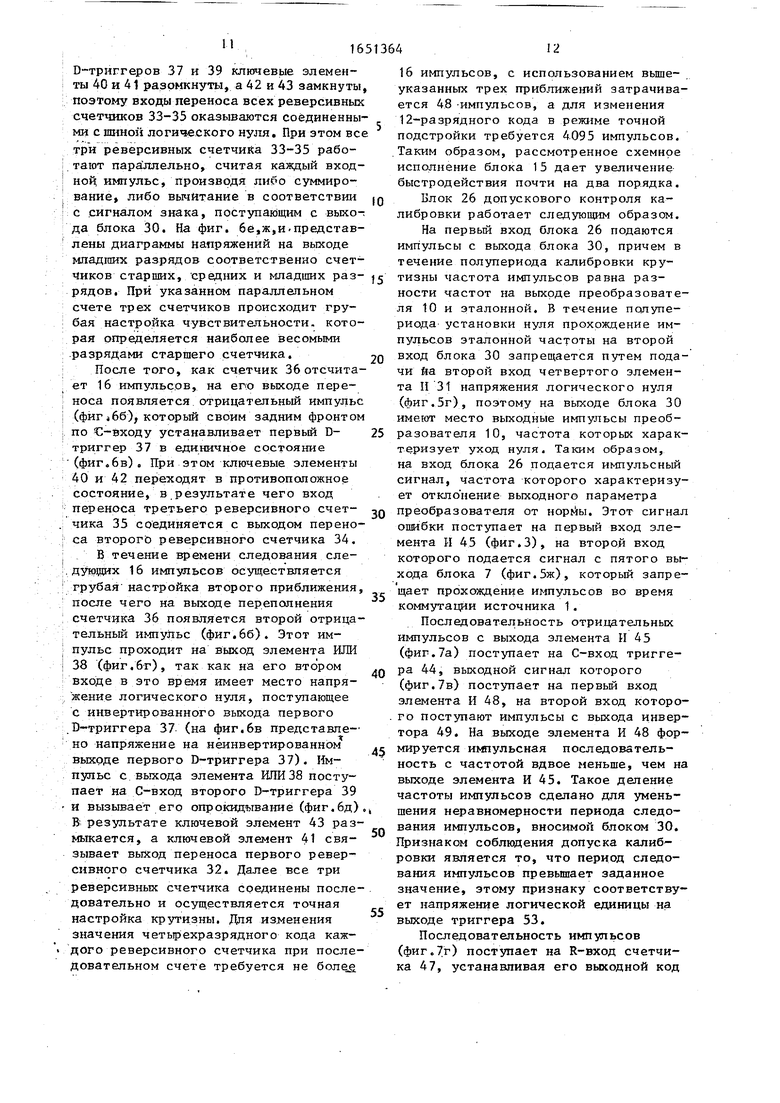
Блок 15 содержит первый, второй и третий реверсивные счетчики 33-35 импульсов, выходы которых образуют выход блока 15, объединенные входы направления счета н объединенные счетные входы образуют соответственно управляющий вход и вход, который соединен также со счетным входом счетчика 36 импульсов, выход переноса которого связан с С-входом первого D-триг- гера 37 и с первым входом элемента
ИЛИ 38, связанного вторым входом с инвертированным выходом первого D- триггера 37, а выходом с С-вхбдом второго D-триггера 39, при этом неинвертированные выходы первого и второго D-триггеров 37 и 39 связаны с управляющими входами соответственно первого и второго коммутирующих элементов 40 и 41, а инвертированные выходы первого и второго D-триггеров 37 и 39 связаны с управляющими входами соответственно третьего и четвертого коммутирующих элементов 42 и 43,- вход
20
переноса второго реверсивного счетчи- $ является первым выходом блока управ- ка 34 связан через четвертый коммутирующий элемент 43 с шиной логического нуля и через второй коммутирующий элемент 41 с выходом переноса первого реверсивного счетчика 33, вход переноса которого присоединен к шине логического нуля; вход переноса третьего реверсивного счетчика 35 связан через третий коммутирующий элемент 42 с шиной логического нуля и через пер- 25 вый коммутирующий элемент 40 - с выходом переноса второго счетчика 34; вход сброса блока 15 образован объединенными R-входом счетчика 3f t R- входами первого и второго D-триггеров 37 и 39 и V-входами первого, второго и третьего реверсивных счетчиков 33-35.
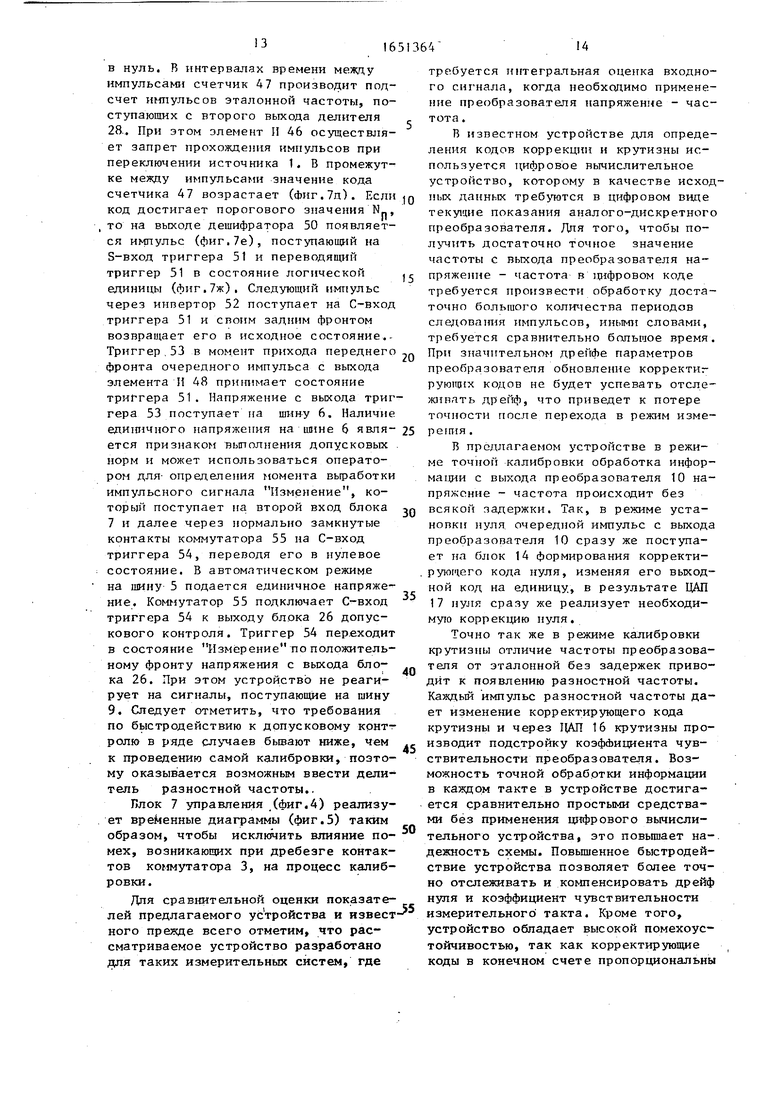
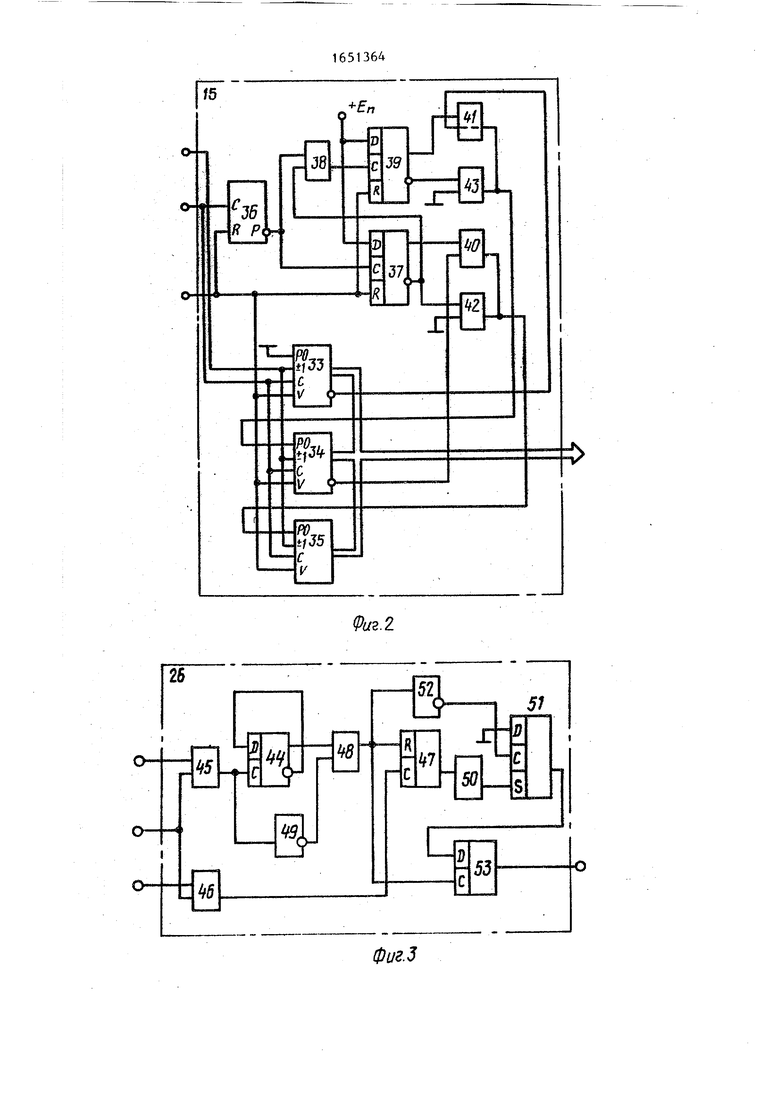
лбния и соединен с R-входом счетчика 57 импульсов, соединенного счетным входом с выходом генератора 58 импульсов, причем выход младшего разряда счетчика 57 соединен с С-входами второго и третьего триггеров 59 и 60. D-вход третьего триггера 60 соединен с выходом старшего разряда счетчика 57 и с вторыми входами элемента И 61 и элемента ИЛИ-НЕ 62, первые входы которых связаны с неинвертированным выходом второго триггера 59, соединенного своим D-входом с неинвертированным выходом трртьего триггера 60, 30 и является вторым выходом блока 7 управления, четвертым и пятым выходами которого являются соответственно выходы элемента И 61 и элемента 1ШИ-НЕ 62, а также соединены с первым и втоБлок 26 допускового контроля ка- 35 Рым входами элемента ИЛИ 63, выход либровки содержит триггер 44, счетныйкоторого является шестым выходом бловхоД которого подключен к выходу пер-ка 7. Вместо отдельного генератора 58
вого элемента И 45, первый и второйвозможно использование общего генеравходы которого являются первым и вторым входами блока 26, второй элемент до И 46, первый вход которого является
тора 27.
Устройство работает следующим образом.
третьим входом блока 26, второй вход соединен с вторым входом первого элемента И 45, а выход с счетным входом
счетчика 47 импульсов, R-вход которо- дс оператором, при этом на шину 5 подаго соединен с выходом третьего элемента И 48, первый вход которого связан с неинвертированным выходом, а второй вход через первый инвертор 49 со счетным входом триггера 44, при этом выходы счетчика 47 через дешиф- ратор 50 связаны с S-входом второго триггера 51, С-вход которого через второй инвертор 52 связан с выходом третьего элемента II 48, D-вход с шиной логического нуля, а неинвертированный выход - с D-входом третьего триггера 53, связанного С-входом с выходом третьего элемента И 48, а не
выход является ныхо1 J64
и нв ертир ованнын дом блока 26.
Блок 7 управления содержит первый триггер 54, S-вход которого является первым входом блока 7, С-вход соединен с выходом коммутатора 55, первый, второй и управляющий входы которого являются соответственно вторым, третьим и четвертым входами блока 7, S-вход первого триггера 54 через формирователь 56 импульсов соединен с шестым выходом блока 7, D-вход с общей шиной, а инвертированный выход
10
возможно
тора 27.
Устройство работает следующим образом.
Вначале рассмотрим случай, когда допусковый контроль осуществляется
ется напряжение логического нуля. После включения электропитания на первьй вход блока 7 через шину 8 подается импульс (фиг.5а), переводящий Q устройство в режим Калибровка. В этом режиме на первом выходе блока 7 имеет место напряжение логического нуля (фиг.5в), которое запирает по второму входу первый элемент И 19, запрещая прохождение на выходную шину 20 импульсов преобразователя 10. Положительное напряжение с выхода инвертора 23, управляемого с первого выхода блока 7, открывает по первому
5
йходу второй элемент И 21, на второй вход которого поступает с третьего выхода блока 7 прямоугольное напряже-, ние (йиг.Зд).
Напряжение с второго выхода блока 7 (биг.Зг) через первый элемент ИЛИ- НЕ 4 поступает на управляющий вход коммутатора 3, который в соответствии с диаграммой (фиг.Зг) периодически подключает вход усилителя 2 либо к источнику 1, либо к выходу датчика 29, напряжение на котором в режиме Калибровка равно нулю.
В случае, если входной сигнал при калибровке по условиям работы отличается от нуля, он может подаваться на вход устройства через шину 24. При этом вход усилителя 2 в процессе калибровки соединяется с нулевой шиной с помощью дополнительного коммутатора 25.
Вначале при напряжении логической единицы на втором выходе блока 7 (фиг.Зг) происходит установка нуля измерительного тракта. При этом импульсы с выхода преобразователя 10 поступают на третий вход второго элемента И 21, который открыт по первому входу сигналом с первого выхода блока 7 (фиг.Зв), а по второму входу - сигналом логической единицы с третьего выхода блока 7 (фиг.5д). Импульсы с выхода элемента И 21 поступают на вход блока 14. На управляющий вход последнего подается сигнал знака в соответствии со знаком ухода нуля. Блок 14 выполнен на основе реверсивного счетчика.
При этом преобразователь 10 является двухполярным, т.е. может работать при знакопеременном входном напряжении. Выходной код блока 14, который изменяется с частотой импульсов преобразователя 10j преобразуется ЦДЛ 17 в постоянное напряжение и подается через третий резистор 18 на первый суммирующий вход преобразователя 10, компенсируя уход нуля измерительного тракта. В установившемся состоянии частота приближается к нулю.
При напряжении логического нуля на втором выходе блока 7 происходит калибровка крутизны. При этом коммутатор 3, управляемый напряжением с второго выхода блока 7 через элемент ШШ-НЕ 4, подключает источник 1 к входу усилителя 2, что приводит к изменению частоты на выходе преобразо0
5
0
5
0
5
0
5
0
5
вателя 10. Импульсный сигнал с выхода преобразователя 10 поступает на первый вход блока 30, на второй вход которого через четвертый элемент И 31 подается эталонная частота с первого выхода гхелитепя 28. Импульсный сигнал на выходе блока 30 имеет частоту, равную разности частот преобразователя 10 и эталонной частоты. Указанный импульсный сигнал поступает на третий вход третьего элемента И 22, который открыт по первому и второму входам сигналами логической единицы, поступающими с первого и четвертого выходов блока 7 (фиг.5в,е).
С выхода третьего элемента И 22 импульсы разностной частоты поступают на вход блока 15, выполненного на базе реверсивного счетчика, на вход на правления счета которого подается сигнал знака с выхода блока 30. Выходной сигнал блока 15 преобразуется в напряжение с помощью ЦАП 16 и подается через четвертый резистор 32 на второй вход преобразователя 10, являющийся входом управления крутизной преобразователя .
Начальное значение крутизны преобразования задается источником 13 и резистором 12. При поступлении импульсов разностной частоты крутизна преобразования измерительного тракта подстраивается таким образом, чтобы разностная частота на выходе блока 30 вычитания частот равнялась нулю или частота на выходе преобразователя 10
равнялась эталонной частоте, i
Когда напряжение на втором выходе блока 7 вновь принимает единичное значение (фиг.Зг), то опять начинается подстройка нуля. Далее процесс повторяется вплоть до перехода в режим Измерение. Во избежание сбоев при калибровке, обусловленных переходными процессами переключения коммутатора 3, фазировка импульсов на третьем и четвертом выходах блока 7 управления (фиг.5д,е) относительно напряжения управления коммутатором 3 (фиг.Зг) выполнена так, чтобы во время процесса коммутации эталонного источника 1 второй и третий элементы И 21 и 22 оказывались запертыми и корректирующие коды на выходах блоков 14 н 15 оставались неизменными. В первой фазе калибровки устанавливается нулевая выходная частота при нулевом входном сигнале, а во второй фазе при подклюценном на вход источнике эталонного сигнала выходная частота подстраивается пол эталонную.
Процесс калибровки заканчивается в момент подачи импульса на шину 9 (Ьиг.5б). При этом на первом выходе блока 7 появляется напряжение логической единицы, которое, открывая по второму входу первый элемент И 19, разрешает прохождение импульсов с выхода преобразователя 10 на выходную шину 20 и поступает через элемент ШШ-НЕ 4 на управляющий вход коммутатора 3, в результате чего вход усилителя 2 подключается к выходу датчика 29. Возникающее на выходе инвертора 23 напряжение логического нуля запирает по первым входам второй и третий элементы II 21 и 22, в результате чего во время измерения импульсы на блоки 14 и 15 не поступают и значение корректирующих кодов остается неизменным, соответствующим полученным к концу калибровки нулю и крутизне измерительного тракта.
Далее рассмотрим, как в устройстве решается задача получения высокой точности калибровки в сочетании с высоким, быстродействием. Установка нуля и крутизны производится попеременно, в то время, когда происходит коррекция нуля, корректирующий код крутизны остается неизменным, и наоборот. В установившемся режиме каждый импульс, поступающий на блок 14 или 15, вызывает изменение выходного кода на единицу в сторону увеличения или уменьшения в соответствии со значением сигнала знака. Такой режим точной автоподстройки позволяет отслеживать имеющий место на практике медленный уход параметров, влияющих на характеристику преобразователя, а также обеспечивает высокую помехоустойчивость при наличии в тракте преобразования высокочастотных помех (происходит осреднение помех). Однако в самом начале калибровки, когда нужно ликвидировать большие отклонения от номинала нуля и крутизны, указанный режим работы сопряжен с большими затратами времени, т.е. не всегда имеет удовлетворительные показатели по быстродействию.
Для обеспечения быстродействия при коррекции нуля в устройстве применено известное техническое решение, заключающееся в том, что блок 14 фор0
5
0
5
0
5
0
5
0
5
мирования корректирующего кода нуля содержит реле частоты, которое при значении частоты выше определенного значения выдает сигнал, переводящий блок 14 в режим грубой настройки, при которой каждый входной импульс изменяет выходной код сразу на сравнительно большое заданное число. Это позволяет быстро ликвидировать большие отклонения кода от номинала. При сравнительно низкой частоте по сигналу с реле частот происходит переход в режим точной настройки нуля.
Предлагаемое техническое решение, обеспечивающее ускоренную начальную автоподстройку нуля, в канале подстройки крутизны оказывается неприемлемым, так как в последнем случае требуется контролировать величину разностной частоты на выходе третьего элемента И 22. Так как разностная частота является неравномерной, то применение реле частоты могло бы привести к сбоям в работе устройства, поэтому в этом устройстве для ускоренной начальной подстройки крутизны использовано другое техническое решение (фиг.2). Блок 15 содержит ре- .версивные счетчики 33 - 35, счетчик 36, первый и второй D-триггеры 37 и 39, коммутирующие элементы 40-43.
Блок 15 работает следующим образом.
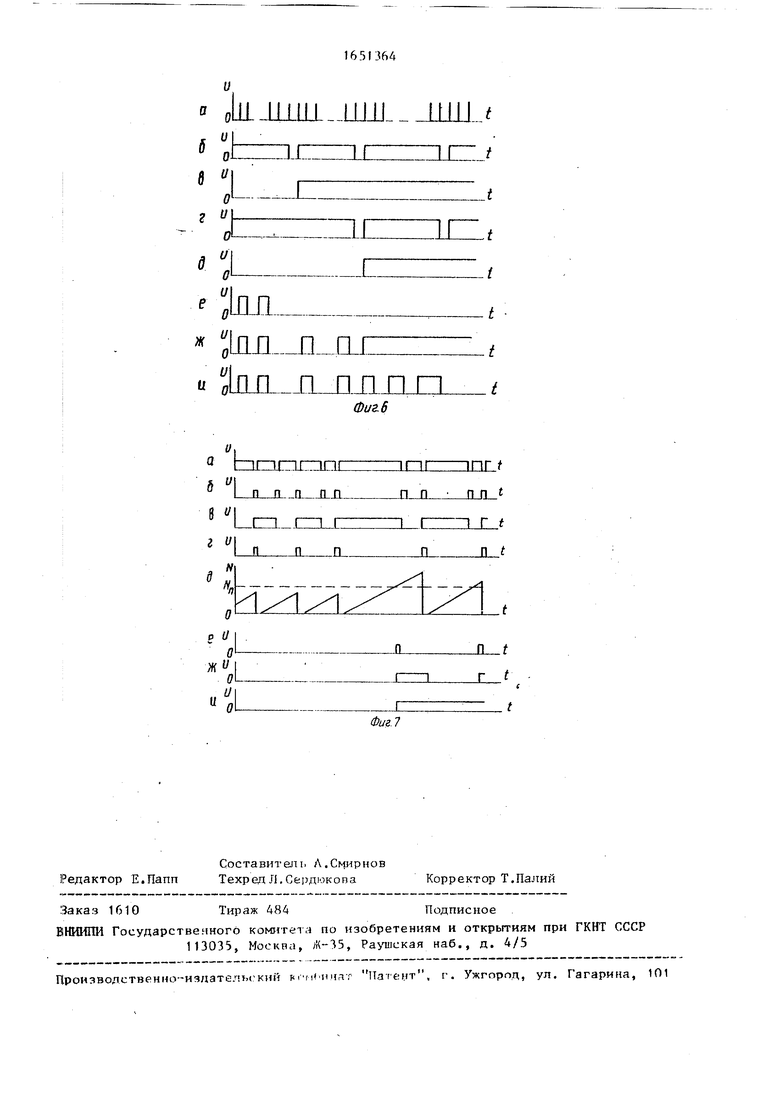
Импульс, подаваемый на шину 8 в начале калибровки (фиг.5а), с шестого выхода блока 7 поступает на блок 15 и устанавливает в нулевое состояние по R-входам счетчик 36, первый и второй D-триггеры 37 и 39 и по V-входам в начальное состояние реверсивные счетчики 33-35 в соответствии с выбранным начальным значением выходного кода блока 15. Далее работа блока 15 определяется количеством импульсов, поступающих с выхода второго элемента И 22 на С-входы счетчика 36 и реверсивных счетчиков 33-35. Вначале, в течение первого полупериода калибровки, когда происходит коррекция, нуля, импульсы на блок 15 не поступают, так как третий элемент И 22 заперт по второму входу. Во втором полупериоде калибровки третий элемент И 22 открывается по второму входу и на блок 15 начинают поступать импульсы разностной частоты (фиг.ба).
В исходном положении в соответствии с состоянием первого и второго
D-триггеров 37 и 39 ключевые элементы 40 и 41 разомкнуты, а 42 и 43 замкнуты, поэтому входы переноса всех реверсивных счетчиков 33-35 оказываются соединенными с шиной логического нуля. При этом все три реверсивных счетчика 33-35 работают параллельно, считая каждый входной импульс, производя либо суммирование, либо вычитание в соответствии с сигналом знака, поступающим с выхода блока 30. На фиг. бе,ж,и-представлены диаграммы напряжений на выходе младших разрядов соответственно счетчиков старших, средних и младших разрядов. При указанном параллельном счете трех счетчиков происходит грубая настройка чувствительности, которая определяется наиболее весомыми разрядами старшего счетч-ика.
После того, как счетчик 36 отсчитает 16 импульсов, на епо выходе переноса появляется отрицательный импульс (), который своим задним фронтом по € входу устанавливает первый D- триггер 37 в единичное состояние (фиг.бв). При этом ключевые элементы 40 и 42 переходят в противоположное состояние, в результате чего вход переноса третьего реверсивного счетчика 35 соединяется с выходом переноса второго реверсивного счетчика 34. В течение времени следования следующих 16 импульсов осуществляется грубая настройка второго приближения, после чего на выходе переполнения счетчика 36 появляется второй отрицательный импульс (фиг.бб). Этот импульс проходит на выход элемента ИЛИ 38 (фиг.бг), так как на его втором входе в это время имеет место напряжение логического нуля, поступающее с инвертированного выхода первого D-триггера 37 (на фиг.бв представлено напряжение на неинвертированном выходе первого D-триггера 37). Импульс с выхода элемента ИЛИ 38 поступает на С-вход второго D-триггера 39 - и вызывает его опрокидывание (фиг.бд). R результате ключевой элемент 43 размыкается, а ключевой элемент 41 связывает выход переноса первого реверсивного счетчика 32. Далее все три реверсивных счетчика соединены последовательно и осуществляется точная настройка крутизны. Для изменения значения четырехразрядного кода каж- дого реверсивного счетчика при последовательном счете требуется не болел
0
5
0
5
0
5
0
5
0
5
16 импульсов, с использованием вышеуказанных трех приближений затрачивается 48 импульсов, а для изменения 12-разрядного кода в режиме точной подстройки требуется 4095 импульсов. Таким образом, рассмотренное схемное исполнение блока 15 дает увеличение быстродействия почти на два порядка.
Блок 26 допускового контроля калибровки работает следующим образом.
На первый вход блока 26 подаются импульсы с выхода блока 30, причем в течение полупериода калибровки крутизны частота импульсов равна разности частот на выходе преобразователя 10 и эталонной. В течение полупериода установки нуля прохождение импульсов эталонной частоты на второй вход блока 30 запрещается путем подачи йа второй вход четвертого элемента И 31 напряжения логического нуля (фиг.5г), поэтому на выходе блока 30 имеют место выходные импульсы преобразователя 10, частота которых характеризует уход нуля. Таким образом, на вход блока 26 подается импульсный сигнал, частота которого характеризует отклонение выходного параметра преобразователя от норйы. Этот сигнал ошибки поступает на первый вход элемента И 45 (фиг.З), на второй вход которого подается сигнал с пятого выхода блока 7 (фиг.5ж), который запре- щает прохождение импульсов во время коммутации источника 1.
Последовательность отрицательных импульсов с выхода элемента И 45 (фиг.7а) поступает на С-вход триггера 44, выходной сигнал которого (фиг.7в) поступает на первый вход элемента И 48, на второй вход которого поступают импульсы с выхода инвертора 49. На выходе элемента И 48 формируется импульсная последовательность с частотой вдвое меньше, чем на выходе элемента И 45. Такое деление частоты импульсов сделано для уменьшения неравномерности периода следования импульсов, вносимой блоком 30. Признаком соблюдения допуска калибровки является то, что период следования импульсов превышает заданное значение, этому признаку соответствует напряжение логической единицы на выходе триггера 53.
Последовательность импульсов (фиг.7г) поступает на R-вход счетчика 47, устанавливая его выходной код
10
15
20
в нуль. В интервалах времени между импульсами счетчик 47 производит подсчет импульсов эталонной частоты, поступающих с второго выхода делителя 28. При этом элемент И 46 осуществляет запрет прохождения импульсов при переключении источника 1. В промежутке между импульсами значение кода счетчика 47 возрастает (фиг.7д). Если код достигает порогового значения N, то на вькоде дешифратора 50 появляется импульс (фиг.7е), поступающий на S-вход триггера 51 и переводящий триггер 51 в состояние логической единицы (Лиг.7ж). Следующий импульс через инвертор 52 поступает на С-вход триггера 51 и своим задним фронтом возвращает его в исходное состояние. - Триггер 53 в момент прихода переднего фронта очередного импульса с выхода элемента И 48 принимает состояние триггера 51. Напряжение с выхода триггера 53 поступает на шину 6. Наличие единичного напряжения на шине 6 явля- 25 ется признаком выполнения допусковых норм и может использоваться оператором для определения момента выработки импульсного сигнала Изменение, который поступает на второй вход блока 7 и далее через нормально замкнутые контакты коммутатора 55 на С-вход триггера 54, переводя его в нулевое состояние. В автоматическом режиме на шину 5 подается единичное напряжение. Коммутатор 55 подключает С-вход триггера 54 к выходу блока 26 допус- кового контроля. Триггер 54 переходит в состояние Измерение по положительному фронту напряжения с выхода блока 26. При этом устройство не реагирует на сигналы, поступающие на шину 9. Следует отметить, что требования по быстродействию к дспусковому контролю в ряде случаев бывают ниже, чем к проведению самой калибровки, поэтому оказывается возможным ввести делитель разностной частоты..
Плок 7 управления (фиг.4) реализует временные диаграммы (фиг.5) таким образом, чтобы исключить влияние помех, возникающих при дребезге контактов коммутатора 3, на процесс калибровки.
Для сравнительной оценки показате30
35
40
45
50
требуется интегральная оценка входного сигнала, когда необходимо применение преобразователя напряжение - частота .
В известном устройстве для определения кодов коррекции и крутизны используется цифровое вычислительное устройство, которому в качестве исход ных данных требуются в цифровом виде текущие показания аналого-дискретного преобразователя. Для того, чтобы получить достаточно точное значение частоты с выхода преобразователя напряжение - частота в цифровом коде требуется произвести обработку достаточно большого количества периодов следования импульсов, иными словами, требуется сравнительно большое время. При значительном дрейфе параметров преобразоватепя обновление корректиг- рующих кодов не будет успевать отслеживать дрейф, что приведет к потере точности поспе перехода в режим измерения .
В предлагаемом устройстве в режиме точной калибровки обработка информации с выхода преобразователя 10 напряжение - частота происходит без всякой задержки. Так, в режиме установки нуля очередной импульс с выхода преобразователя 10 сразу же поступает на блок 14 формирования корректирующего кода нуля, изменяя его выходной код на единицу, в результате ЦАП 17 нуля сразу же реализует необходимую корр екцию нуля.
Точно так же в режиме калибровки крутизны отличие частоты преобразователя от эталонной без задержек приводит к появлению разностной частоты. Каждый импульс разностной частоты дает изменение корректирующего кода крутизны и через ЦАП 16 крутизны производит подстройку коэффициента чувствительности преобразователя. Возможность точной обработки информации в каждом такте в устройстве достигается сравнительно простыми средствами без применения цифрового вычислительного устройства, это повышает надежность схемы. Повышенное быстродействие устройства позволяет более точно отслеживать и компенсировать дрейф нуля и коэффициент чувствительности
лей предлагаемого устройства и извест- измерительного такта. Кроме того,
устройство обладает высокой помехоустойчивостью, так как корректирующие
ного прежде всего отметим, что рассматриваемое устройство разработано
для таких измерительных систем, где
5
0
5
0
5
0
требуется интегральная оценка входного сигнала, когда необходимо применение преобразователя напряжение - частота .
В известном устройстве для определения кодов коррекции и крутизны используется цифровое вычислительное устройство, которому в качестве исходных данных требуются в цифровом виде текущие показания аналого-дискретного преобразователя. Для того, чтобы получить достаточно точное значение частоты с выхода преобразователя напряжение - частота в цифровом коде требуется произвести обработку достаточно большого количества периодов следования импульсов, иными словами, требуется сравнительно большое время. При значительном дрейфе параметров преобразоватепя обновление корректиг- рующих кодов не будет успевать отслеживать дрейф, что приведет к потере точности поспе перехода в режим измерения .
В предлагаемом устройстве в режиме точной калибровки обработка информации с выхода преобразователя 10 напряжение - частота происходит без всякой задержки. Так, в режиме установки нуля очередной импульс с выхода преобразователя 10 сразу же поступает на блок 14 формирования корректирующего кода нуля, изменяя его выходной код на единицу, в результате ЦАП 17 нуля сразу же реализует необходимую корр екцию нуля.
Точно так же в режиме калибровки крутизны отличие частоты преобразователя от эталонной без задержек приводит к появлению разностной частоты. Каждый импульс разностной частоты дает изменение корректирующего кода крутизны и через ЦАП 16 крутизны производит подстройку коэффициента чувствительности преобразователя. Возможность точной обработки информации в каждом такте в устройстве достигается сравнительно простыми средствами без применения цифрового вычислительного устройства, это повышает надежность схемы. Повышенное быстродействие устройства позволяет более точно отслеживать и компенсировать дрейф нуля и коэффициент чувствительности
измерительного такта. Кроме того,
коды в конечном счете пропорциональны
числу импульсов с выхода преобразователя, которое пропорционально интегралу от входного сигнала (это вытекает из принципа работы преобразователя напряжение - частота). А при интегрировании, как известно, существенно уменьшается влияние высокочастотных помех.
Таким образом, предлагаемое устройство обладает по сравнению с известным более высокими точностью, быстродействием и помехоустойчивостью.
Формула изобретения
корректирующего кода нуля и блока формирования корректирующего кода крутизны, причем импульсный выход преобразователя напряжение - частота присоединен к третьему входу второго элемента И, а выход знака - к управляющему входу блока формирования
корректирующего кода нуля и также содержащее блок допускового контроля калибровки, и генератор импульсов опорной частоты, отличающее- с я тем, что, с целью повышения точности при одновременном повышении быстродействия и помехоустойчивости, в него введены делитель частоты, четвертый элемент И, четвертый резистор и блок вычитания частот, первый вход которого подключен к импульсному выходу преобразователя напряжение - частота, второй вход к выходу четвер0
0
5
5
5 того элемента И, первый вход которого подключен к первому выходу делителя частоты, а второй вход к выходу элемента ПЛИ-IIE, импульсный выход блока вычитания частот подключен к третьему входу элемента И, выход знака - к управляющему входу блока формирования корректирующего кода крутизны, выход цифроаналогового преобразователя крутизны через четвертый резистор соединен с вторым входом преобразователя напряжение - частота, причем вход делителя частоты соединен с выходом генератора импульсов опорной частоты, первый, второй и третьи входы блока допускового контроля калибровки соединены соответственно с импульсным выходом блока вычитания частот, с пятым выходом блока управления и вторым выходом делителя частоты, а выход - с третьим входом блока управления и шиной сигнала контроля, вход сброса блока формирования корректирующего кода крутизны соединен с шестым выходом блока упQ равления, четвертый вход которого
5
0
5
соединен с шиной Автоматический режим, при этом блок формирования корректирующего кода крутизны содержит с первого по четвертый коммутирующие элементы и первьй, второй и третий реверсивные счетчики импульсов, выходы которых образуют выход блока формирования корректирующего кода крутизны, объединенные входы направления счета и объединенные счетные входы образуют соответственно управляющий вход и вход, с которым соединен также счетный вход счетчика импульсов, J выход переноса которого связан с С-входом первого В-триггера и с первым входом элемента ИЛИ, связанного своим вторым входом с инвертированным выходом первого D-триггера, а , выходом - с С-входом второго D-триг17165
гора, при -и ом неинверткрованные выходы первого и второго D-трнггеров связаны с упраачяющими входами соответственно первого и второго комму- тируквдих элементов, а инвертированные выходы первого и второго D-триггеров связаны с управляющими входами соответственно третьего и четвертого коммутирующих элементов,- вход переноса второго реверсивного счетчика импульсов связан через четвертый коммутирующий элемент с шиной логического нуля и через второй коммутирующий элемент - с выходом переноса первого реверсивного счетчика импульсов, вход переноса которого присоединен к тине логического нуля, вход переноса третьего реверсивного счетчика импульсов связан через третий коммутирующий элемент с шиной логического нуля и через первый коммутирующий элемент - с выходом переноса второго реверсивного счетчика импульсов, вход сброса блока образован объединенными R-вхо- дом счетчика импульсов, R-входами первого и второго D-триггеров с V- входами первого, второго и третьего реверсивных счетчиков импульсов.
I W4
1Ь
счетчика импульсов через дешифратор связаны с S-входом второго триггера, С-вход которого через второй инвертор связан с выходом третьего элемента И, D-вход - с шиной логического нуля, а неинвертированный выход - с D-входом третьего триггера, С-вход которого соединен с выходом третьего
элемента И, а неинвертированнын вькод является выходом блока допускового контроля калибровки.
5 управления содержит первый триггер, S-вход которого является первым входом блока управления, С-вход соединен с выходом коммутатора, первый и второй управляющий входы которого явля0 ются соответственно вторым, третьим и четвертым входами блока управления, S-вход первого триггера соединен через Лормирователь импульсов с шестым выходом блока управления, D-вход - с
5 общей шиной, а инвертированный выход является первым выходом блока управления и соединен с R-входом счетчика импульсов, счетный вход которого соединен с выходом генератора импульсов,
0 причем выход младшего разряда счетчика импульсов соединен с С-входами второго и третьего триггеров, D-вход второго триггера соединен с выходом старшего разряда счетчика импульсов и с первыми входами элементов И и ИЛИ-НЕ, вторые входы которых соединены с неинвертированным выходом третьего триггера, D-вход которого соединен с неинвертированным выходом
« второго триггера и является вторым выходом блока управления, третьим и четвертым выходами которого являются соответственно выходы элементов И и ИЛИ-НЕ, соединенные также с первым
, и вторым входами элемента ИЛИ, выход которого является шестым выходом блока управления.
5
Фиг.2.
Фиг.З
6 ь
Фиг, 5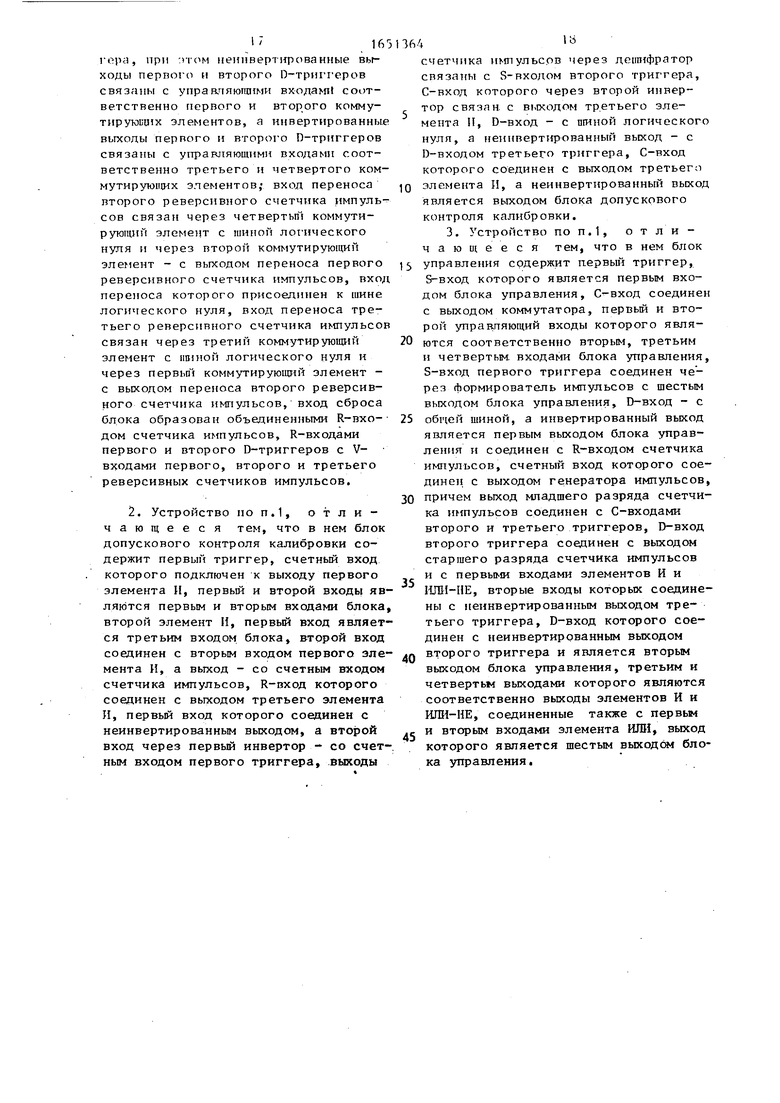
| Частотно-импульсное устройство преобразования сигнала с мостового датчика | 1986 |
|
SU1383474A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США f 4364027, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
