Изобретение относится к геофизическим методам диагностики и контроля разрушения горных пород, и может быть использовано на рудных и нерудных месторождениях для исследования и локации образовавшихся несплошностей.
Известен способ [1], по которому контролируемый участок горного массива оконтуривается приемными датчиками и по разности времен прихода упругой волны, от образовавшейся несплошности, определяется местоположение источника.
К недостаткам способа следует отнести низкую достоверность и точность ввиду некорректности задания координат приемных датчиков внутри контролируемой зоны и - как следствие, выдача ложного результата.
Более близким по существу является способ определения координат источников акустической эмиссии в горном массиве [2], в котором приемные датчики устанавливают в углах геометрической фигуры тетраэдр и расстояние между ними выбирают по формуле.
К недостаткам следует отнести низкую достоверность и точность результатов.
Технический результат предлагаемого способа заключается в повышении достоверности и точности определения местоположения источников акустической эмиссии в массиве горных пород.
Технический результат достигается за счет того, что в способе определения местоположения источников акустической эмиссии в массиве горных пород, заключающемся в бурении скважин, размещении в них датчиков антенны, измерении временной разности прихода волн, в выборе расстояний между приемными датчиками по формуле для достоверности и точности определения местоположения источников акустической эмиссии в антенне используют дополнительное количество датчиков, причем не менее трех из них являются приемно-излучающими датчиками, при этом точные координаты приемно-излучающих датчиков определяют относительно реперной точки в массиве горных пород, дополнительно поочередно излучают приемно-излучающими датчиками акустический сигнал в массив горных пород и принимают его всеми датчиками, не привязанными к реперной точке, измеряя при этом время распространения акустического сигнала между датчиками, а по измеренному времени распространения акустического сигнала между датчиками определяют акустические координаты датчиков, не привязанных к реперной точке, с учетом особенностей распространения акустического сигнала, а местоположение источников акустической эмиссии вычисляется по известным формулам с учетом найденных значений координат приемно-излучающих датчиков и датчиков, не привязанных к реперной точке.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
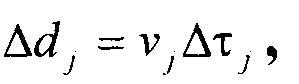
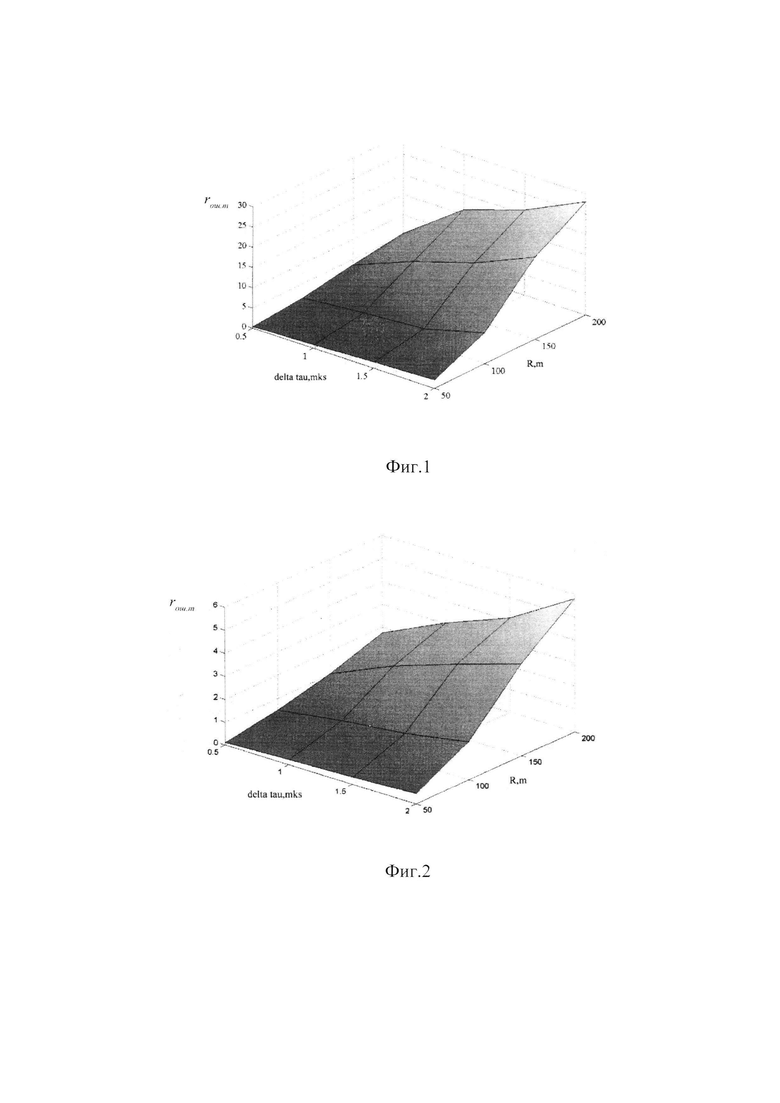
На фиг. 1 - результаты численного моделирования ошибок локации без учета предложенного способа; на фиг. 2. - результаты численного моделирования ошибок локации с учетом предложенного способа.
Способ определения местоположения источников акустической эмиссии в массиве горных пород выполняется следующим образом.
На выбранном участке массива горных пород пробуривают скважины и размещают в дно скважин датчики антенны с одинаковыми характеристиками, причем не менее трех из них обратимые, т.е. приемно-излучающие. Местоположения источников акустической эмиссии определяется по временным задержкам прихода волны от датчика к датчику, т.е. по распространению акустической волны внутри антенны и по известным координатам датчиков. Антенна - это установленные определенным образом датчики в контролируемом массиве горных пород. Для достоверности и точности определения местоположения источников акустической эмиссии в антенне используют дополнительное количество датчиков, причем не менее трех из них являются приемно-излучающими датчиками. Точные координаты приемно-излучающих датчиков определяют относительно реперной точки в массиве горных пород. Дополнительно поочередно излучают приемно-излучающими датчиками акустический сигнал в массив горных пород и принимают его всеми датчиками, не привязанными к реперной точке, измеряя при этом время распространения акустического сигнала между датчиками.
По измеренному времени распространения акустического сигнала между датчиками определяют акустические координаты датчиков, не привязанных к реперной точке, с учетом особенностей распространения акустического сигнала. Расчеты могут быть произведены по выражению

где x,y,z - координаты источника излучения, т.е. приемно-излучающего датчика, координаты которого определены относительно реперной точки; x0,y0,z0 - координаты базового датчика, координаты которого также определены относительно реперной точки; xi,yi,zi - координаты искомого датчика, координаты которого необходимо определить.
Местоположение источников акустической эмиссии вычисляется по известным формулам с учетом найденных значений координат приемно-излучающих датчиков и датчиков, не привязанных к реперной точке:
где xk - координаты источника (k=1, 2, 3), аkj - координаты датчика, i=1, 2… - номера датчиков, d0 - расстояние от источника датчика, принявшего сигнал АЭ (волны) первым, νj - скорость распространения АЭ волны в направлении j-го датчика, Δτ - разность времен перехода волны АЭ между j-м и первым датчиком.
При бурении скважины, даже на выбранном однородном участке нельзя положиться на геометрию расположения датчиков и чистую физику процесса, т.к. во-первых, процесс бурения разрушает породу и под тяжестью бура скважина может иметь не прямолинейный участок, а отклоняющийся от прямолинейного, т.е. более похож на дугу с большим радиусом кривизны; во-вторых, при воздействии бура на участок горного массива последний разрушается не всегда по размерам коронки бура, т.е. существует нарушение целостности в этой области дна скважины. Эти нарушения невозможно учесть, т.к. они имеют нечеткие контуры и переменную плотность. Акустическая волна проходит разрушенные и неразрушенные породы с различной скоростью, и если ее не учитывать, то измерения теряют смысл, а местоположение источника будет указано не верно. Поэтому, при установке датчиков в скважины имеет место неоднозначность в определении их координат, так как определение местоположения источников акустической эмиссии определяется по аналитическим формулам, в которых учитываются, в том числе, и координаты датчиков, то выше приведенные ограничения могут существенно влиять на результат. Чтобы повысить достоверность и точность места определения источников акустической эмиссии необходимо учитывать местоположение датчиков с учетом прохождения акустической волны с учетом нечеткости контуров и переменной плотности. А именно, триангуляционным методом по известным координатам не менее трех приемно-излучающих датчиков определить с помощью акустического сигнала координаты всех остальных датчиков. Так как определение местоположения источника акустической эмиссии будет вестись по времени распространения акустического сигнала между датчиками (т.е. с учетом всех неоднородностей и кривизны), то точность и достоверность результатов существенно выше, чем у известных способов.
Численное моделирование проводилось с различными конфигурациями антенн: датчики брались приемно-излучающие и устанавливались в углах тетраэдра, куба, и по сфере. Результаты численного моделирования показали, что в отдельных направлениях точность может быть улучшена существенно, а значит достоверность полученной информации выше. По данным численного моделирования для антенны типа тетраэдр были построены графические поверхности ошибок для Rm=200 м. На фиг. 1 ошибки рассчитывались без учета предложенного способа, а на фиг. 2 - с учетом вышеописанного способа. Здесь delta tau - ошибка приема прихода акустической волны в массиве горных пород; rош - ошибка локации источника акустической эмиссии в массиве горных пород. Из графиков видно, что на отдельных расстояниях точность может быть улучшена более чем в три раза, а значит и достоверность полученной информации о местоположении источника сейсмоакустической эмиссии выше.
Источники информации
1. Maichen Ge, Hardy Η Reginald. The mechanism of Array geometry in the control of AE/MS sours location accuracy. - Key Questions in Rock Mechanics. - Balkema, Rotterdam, 1988, pp. 587-605.
2.Патент РФ №2009528, G01V 1/24, G01V 1/00. Способ определения координат источников акустической эмиссии в горном массиве, опубл. 15.03.1994.
Изобретение относится к геофизическим методам диагностики и контроля разрушения горных пород и может быть использовано на рудных и нерудных месторождениях для исследования и локации образовавшихся несплошностей. Для достоверности и точности определения местоположения источников акустической эмиссии в антенне используют дополнительное количество датчиков, причем не менее трех из них являются приемно-излучающими датчиками, при этом точные координаты приемно-излучающих датчиков определяют относительно реперной точки в массиве горных пород. Дополнительно поочередно излучают приемно-излучающими датчиками акустический сигнал в массив горных пород и принимают его всеми датчиками, не привязанными к реперной точке, измеряя при этом время распространения акустического сигнала между датчиками. По измеренному времени распространения акустического сигнала между датчиками определяют акустические координаты датчиков, не привязанных к реперной точке, с учетом особенностей распространения акустического сигнала, а местоположение источников акустической эмиссии вычисляется по известным формулам с учетом найденных значений координат приемно-излучающих датчиков и датчиков, не привязанных к реперной точке. Технический результат - повышение достоверности и точности определения местоположения источников акустической эмиссии в массиве горных пород. 2 ил.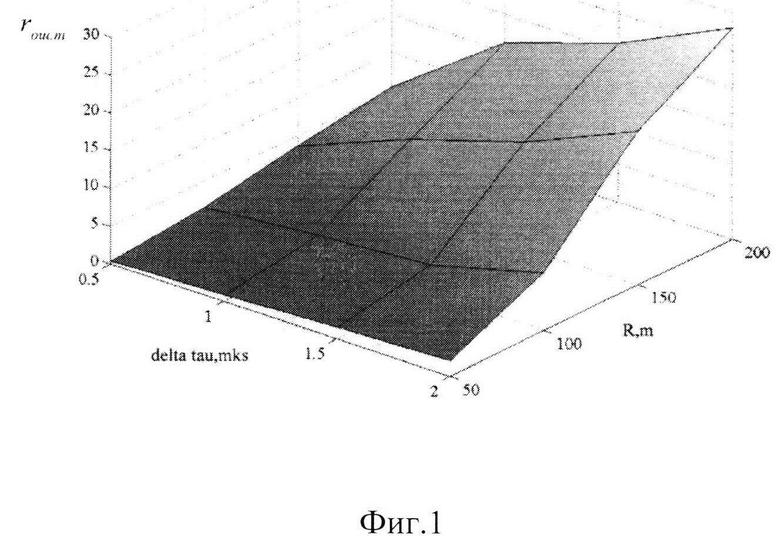
Способ определения местоположения источников акустической эмиссии в массиве горных пород, заключающийся в бурении скважин, размещении в них датчиков антенны, измерении временной разности прихода волн, в выборе расстояний между приемными датчиками по формуле, отличающийся тем, что для достоверности и точности определения местоположения источников акустической эмиссии в антенне используют дополнительное количество датчиков, причем не менее трех из них являются приемно-излучающими датчиками, при этом точные координаты приемно-излучающих датчиков определяют относительно реперной точки в массиве горных пород, дополнительно поочередно излучают приемно-излучающими датчиками акустический сигнал в массив горных пород и принимают его всеми датчиками, не привязанными к реперной точке, измеряя при этом время распространения акустического сигнала между датчиками, а по измеренному времени распространения акустического сигнала между датчиками определяют акустические координаты датчиков, не привязанных к реперной точке, с учетом особенностей распространения акустического сигнала, а местоположение источников акустической эмиссии вычисляется по известным формулам с учетом найденных значений координат приемно-излучающих датчиков и датчиков, не привязанных к реперной точке.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ АКУСТИЧЕСКОЙ ЭМИССИИ В ГОРНОМ МАССИВЕ | 1990 |
|
RU2009528C1 |
| Способ локации источников акустической эмиссии в массиве горных пород | 2015 |
|
RU2613050C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОЧАГА | 0 |
|
SU242430A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ | 2011 |
|
RU2451307C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| WO 2009007822 A2, 15.01.2009. | |||

