А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНАЯ ГРУЗОВАЯ ПЛАТФОРМА | 2012 |
|
RU2518279C2 |
| Устройство для подачи груза в проемы здания | 1990 |
|
SU1766831A1 |
| Устройство для подачи грузов в проемы зданий | 1986 |
|
SU1463717A1 |
| Устройство для подачи грузов в труднодоступные места | 1982 |
|
SU1057397A1 |
| Устройство для подачи грузов в проемы здания | 1988 |
|
SU1623944A1 |
| Установка для выполнения отделочных работ | 1990 |
|
SU1768730A1 |
| Устройство для подачи грузов в проемы зданий | 1987 |
|
SU1491807A1 |
| ПЕРЕГРУЗЧИК | 1991 |
|
RU2020088C1 |
| КОНСОЛЬНАЯ РАБОЧАЯ ПЛОЩАДКА | 1990 |
|
RU2024711C1 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ НА ВЫСОТЕ | 1992 |
|
RU2018601C1 |
Изобретение относится к области строительства и м.б. использовано для приема штучных грузов, подаваемых краном, в проемы зданий и сооружений. Целью изобретения является снижение трудоемкости установки и эксплуатации. Устройство для приема груза в проемы здания включает грузовую площадку, выполненную составной из стационарной платформы 1 и рольганговой тележки 2. Стационарная платформа 1 снабжена подъемными винтами и направляющими, а рольганговая тележка оснащена ловителем подъемных винтов. 7 ил.
////////////
FT
Изобретение относится к строительству и может быть использовано для приема штучных грузов, подаваемых краном и другими грузоподъемными механизмами, в проемы зданий и сооружений.
Цель изобретения - снижение трудоемкости установки и эксплуатации.
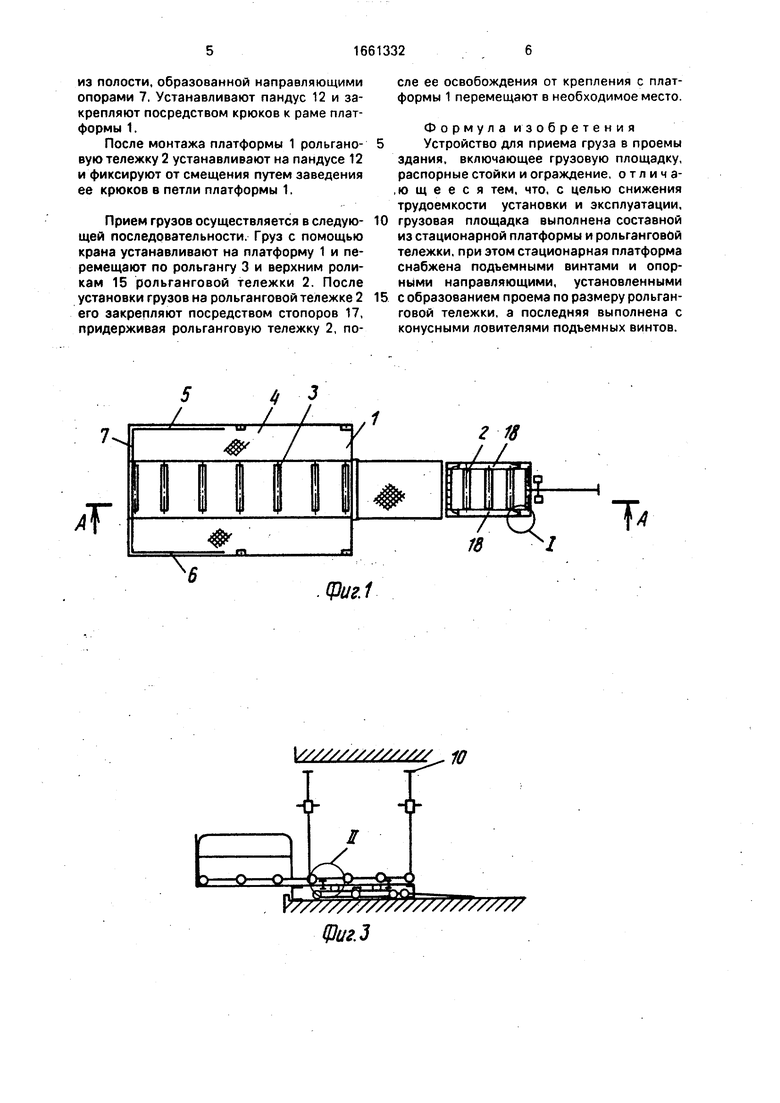
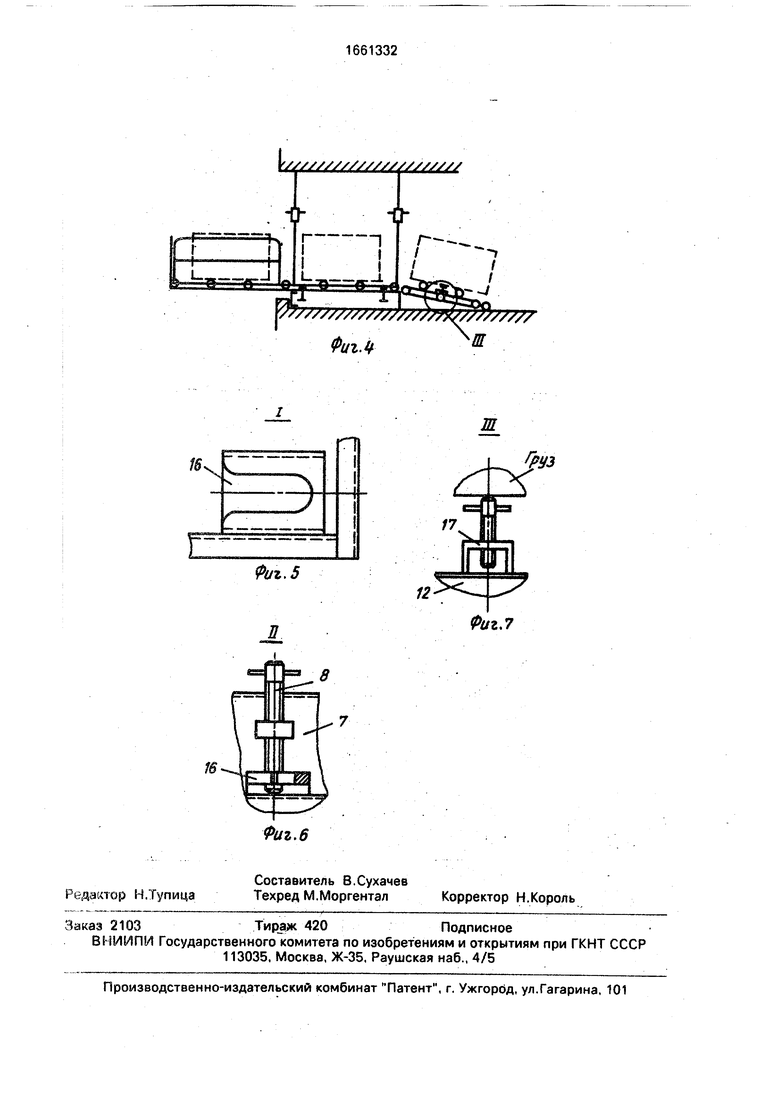
На фиг. 1 изображено устройство для приема груза; на фиг, 2 - разрез А-А на фиг. 1; на фиг. 3 - схема монтажа площадки в проеме; на фиг. 4 - схема приема и транспортирования груза; на фиг. 5 - узел 1 на фиг. 1; на фиг. 6 - узел И на фиг. 3; на фиг, 7 - узел III на фиг. 4.
Грузовая площадка выполнена состав- нЧ)й из стационарной платформы 1 и рольганговой тележки 2.
Стационарная площадка служит для приема грузов и выхода рабочих на нее, платформа 1 содержит раму сварной конструкции с рольгангом 3 и настилами 4, ограждения 5 боковое и торцовое, стойки 6. Снизу рамы жестко прикреплены направляющие Опоры 7 с подъемными винтами 8,
Боковые и торцовое ограждения 5 выполнены в виде отдельных секций из труб. Стойки 6 выполнены из двух труб, которые Соединены между собой гайкой 9. Нижняя часть стойки неподвижно крепится к раме, в верхняя часть снабжена вращающейся пятой 10. Гайка 9 для удобства вращения имеет рукоятку 11.
Рольганг 3 представляет собой сборно-разборную конструкцию, состоящую из двух швеллеров, на которых посредством осей установлены ролики. В качестве подшипника предусмотрен подшипник скольжения.
Направляющие опоры 7 закреплены же- стко к раме снизу вдоль продольной оси платформы 1 и образуют полость для въезда в нее рольганговой тележки 2. Длина направляющих опор 7 составляет примерно половину длины платформы 1 для того, что- бы при подаче платформы 1 в проем рольганговой тележки 2 она не опрокидывалась. Нажимные винты представляют собой винты, которые на одном конце выполнены с выступами для захвата и центровки роль- ранговой тележки 2 относительно направляющих опор 7 и сферическую поверхность для опирания на поверхность рольганговой тележки 2, Другой конец винта снабжен рукояткой, которая находится ниже уровня площадки.
Гайки винтов прикреплены к направляющим опорам 7, Нажимные винты 8 обеспечивают отрыв платформы 1 от пола перед ее транспортировкой.
На раме стационарной платформы 1 предусмотрены петли как для крепления пандуса 12, так и рольганговой тележки 2 посредством крюков, предотвращающих их взаимное смещение при работе.
Рольганговая тележка 2 состоит из рамы 13 с нижними 14 и верхними 15 роликами, ловителей пят 16 в виде пластин с открытыми пазами, установленных по углам рамы 13, и стопоров 17. Стопоры 17 установлены с двух сторон по две штуки и выполнены в виде нажимных винтов. Стопоры 17 предназначены для стопорения груза, предотвращая его смещение относительно рольганговой тележки 2 при движении последней.
На раме 13 предусмотрены крюки для фиксации рольганговой тележки путем установки их в петли приемной площадки.
Пандус 12 представляет собой сварную конструкцию с наклонной поверхностью и имеет крюки для фиксации ее относительно платформы 1.
Монтаж платформы 1 для приема штучных грузов производится в следующей последовательности.
Производят сборку стационарной платформы 1. После сборки платформы 1 необходима ее транспортировка к проему и установка в указанном проеме. Для возможности транспортировки платформы 1 выполняются следующие операции.
Вначале рольганговая тележка 2 въезжает в полость, образованную направляющими опорами 7, таким образом, чтобы нажимные винты 8 попали в ловители-пяты 16 рольганговой тележки 2,
Для удобства захвата нажимных винтов 8 ловителями-пятами 16 необходимо предварительно приподнять нажимные винты 8, а рольганговую тележку 2 перемещать до тех пор, пока уширенные части ловителей- пят t6 не будут находиться напротив нажимных винтов 8. После этого отпускают нажимные винты 8 до такого расстояния, чтобы при перемещении рольганговой тележки 2 они попали в пазы ловителей-пят 16, затем продолжают перемещение рольганговой тележки 2 до упора.
Вращением рукоятки нажимного винта 8 приподнимают платформу 1 от пола относительно рольганговой тележки 2, после чего платформу 1 перемещают рольганговой тележкой 2 к проему. Установив платформу 1 относительно проема в определенном положении, ее опускают вращением нажимных винтов 8. Затем посредством стоек 6 распирают платформу 1 относительно потолка и пола. После закрепления платформы 1 стойками 6 рольганговую тележку освобождают от нажимных винтов 8 л выводят
из полости, образованной направляющими опорами 7, Устанавливают пандус 12 и закрепляют посредством крюков к раме платформы 1.
После монтажа платформы 1 роль га новую тележку 2 устанавливают на пандусе 12 и фиксируют от смещения путем заведения ее крюков в петли платформы 1.
Прием грузов осуществляется в следующей последовательности. Груз с помощью крана устанавливают на платформу 1 и перемещают по рольгангу 3 и верхним роликам 15 рольганговой тележки 2. После установки грузов на рольганговой тележке 2 его закрепляют посредством стопоров 17, придерживая рольганговую тележку 2, по/
L±
17
AT
фиг.1
Фиг.З
5
еле ее освобождения от крепления с платформы 1 перемещают в необходимое место.
Формула изобретения Устройство для приема груза в проемы здания, включающее грузовую площадку, распорные стойки и ограждение, о т л и ч а- ,ю щ е е с я тем, что, с целью снижения трудоемкости установки и эксплуатации, грузовая площадка выполнена составной из стационарной платформы и рольганговой тележки, при этом стационарная платформа снабжена подъемными винтами и опорными направляющими, установленными с образованием проема по размеру рольганговой тележки, а последняя выполнена с конусными ловителями подъемных винтов.
у////////////
рД
у7 / ///////////////7У{///////77
Фиг4
Ш
1
Фиг. 5
8
Ш
т
Фиг.7
| Устройство для подачи груза в оконный проем здания | 1982 |
|
SU1155560A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
