1
(21)4638590/14
(22)17.01.89
(46) 30.07.91 .Бюл. W 28
(71)Институт физиологии Коми научного центра Уральского отделения
АН СССР и Свердловский городской центр научно-технического творчества молодежи
(72)Ф.А.Бляхман, В,С.Мархасин, В.Я.Изаков и Х.М.Нафиков
(53) 615.475(088.8)
(56)Авторское свидетельство
№ 1560094, кл. А 61 В 5/Ю, 1988,
(5) УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ МЫШЦ
(57)Изобретение относится к медицинской технике, к устройствам для исследования и регистрации механической активности мышц человека и животных, особенно гетерогенного миокарда, и может быть использовано в физиологии, фармакологии и кардиологии. Цель изобретения - расширение области применения устройства. Использование изобретения обеспечивает выявление взаимодействия последовательных участков гетерогенного миокарда. Устройство содержит по крайней мере одну камеру 2 с физиологическим раствором 3 и электродами 6,7 - электростимулятора 8. 3 камере 2 размещены последовательно соединенные через рычаг 10, второй задатчик 11 для создания нагрузки на мышцу, препараты 4 и 5 миокарда, соединенные с датчиком 9 силы сокращения мышц и блоком 13. В устройстве имеются ключи, сумматоры, блок 36 формирования физиологического режима нагрузки. 2 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования механических свойств мышцы | 1989 |
|
SU1632419A2 |
| Устройство для исследования механических свойств мышцы | 1989 |
|
SU1650088A2 |
| Устройство для исследования механических свойств мышцы | 1988 |
|
SU1560093A1 |
| Устройство для исследования механических свойств мышцы | 1984 |
|
SU1316655A1 |
| Устройство для исследования механических свойств мышцы | 1989 |
|
SU1637761A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ИМПУЛЬСОВ | 1995 |
|
RU2098918C1 |
| СПОСОБ ОЦЕНКИ СОКРАТИМОСТИ МИОКАРДА | 1996 |
|
RU2154413C2 |
| Модель мышцы | 1983 |
|
SU1164746A1 |
| СПОСОБ КРАНИОСПИНАЛЬНОЙ ЭЛЕКТРОМАГНИТОТЕРАПИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2264234C1 |
| Учебное пособие "маятник | 1980 |
|
SU896670A1 |

Изобретение относится к медицинской технике, к устройствам для исследования и регистрации механической активности мышц человека и животных, особенно, гетерогенного миокарда и может быть использовано в физиологии, фармакологии и кардиологии. Цель изобретения - расширение области применения устройства. Использование изобретения обеспечивает выявление взаимодействия последовательных участков гетерогенного миокарда. Устройство содержит, по крайней мере, одну камеру 2 с физиологическим раствором 3 и электродами 6, 7 электростимулятора 8. В камере 2 размещены последовательно соединенные через рычаг 10 второй задатчик 11 для создания нагрузки на мышцу, препараты миокарда 4 и 5, соединенные с датчиком 9 силы сокращений мышц и блоком 13. В устройстве имеются ключи, сумматоры, блок 36 формирования физиологического режима нагрузки. 2 ил.
Изобретение относится к медицинской технике, а именно к устройствам для исследования и регистрации механической активности гетерогенного миокарда и других мышц животных и человека, и может быть использовано в физиологии, фармакологии и кардиологии.
Цель изобретения - расширение области применения путем исследований взаимодействия последовательно расположенных участков мышечной ткани.
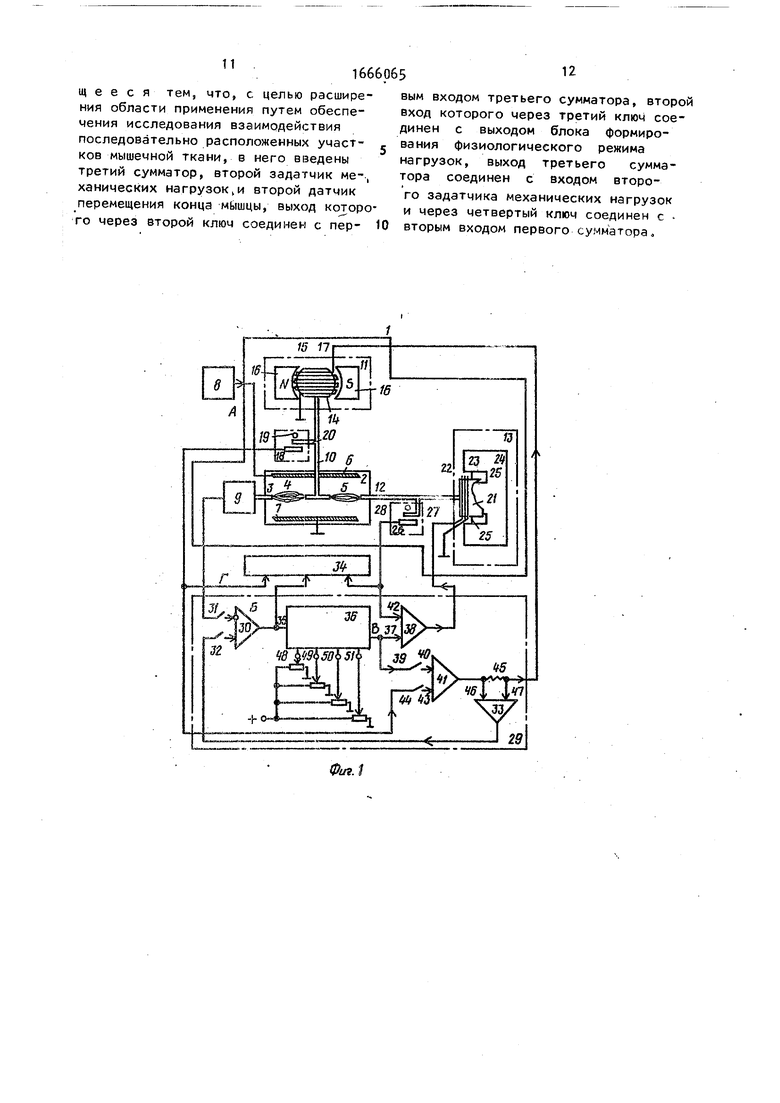
На фиг.1 приведена функциональная схема устройства; на фиг,2 - диаграммы напряжений на выходах блоков устройства, где использованы следующие обозначения: А - напряжение на выходе электростимулятора; Б - напря- жение на выходе сумматора 30; В - напряжение на выходе блока 36 формирования физиологической нагрузки на мышцы; Г - напряжение на выходе датчика 18 перемещения рычага 10; Д.ь - максимальное укорочение комплекса препаратов 4 и А Ц. - величина укорочения препарата 4 под грузом 0,5 РО в комплексе с препаратом 5; UL$- - величина укорочения препарата 5 под грузом 0,5 РО в комплексе с препаратом 4; с - время.
СЛ
Устройство для исследования механических свойств мышцы содержит корпус 1, камеру 2 с питательным физиологическим раствором 3 и размещенными в ней исследуемыми препаратами (мышцами) 4 и 5. В камере 2 размещены электроды 6 и 7 электростимулятора 8.
Одним концом первая мышца (препарат) 4 жестко соединена с датчиком 9 силы сокращений, а другим - с рычагом 10 второго задатчика 11 механичес ких нагрузок (управляемым маятником). С рычагом 10 также соединена одним концом вторая мышца (препарат) 5г другой ее конец жестко прикреплен к штоку 12 первого задатчика 13 механических нагрузок.
Рычаг 10 управляемого маятника 11 соединен с катушкой 145 имеющей обмотку 15, помещенными в зазор постоян ного магнита 16. Катушка 14 заключена в зазоре с помощью часовой оси 17, зафиксированной по концам в оправе с рубиновыми камнями (не показано), позволяющей оычагу 10 с катушкой 14 свобо, но перемещаться вдоль длинной оси последовательно соединенных препаратов 4 и 5.
С рычагом 10 управляемого маятника 11 соединен также датчик 18 перемещения концов препаратов 4 и 5, включающий оптронную пару (светодиод - фотодиод) 19, оптический канал которой перекрывается экраном 20, закреп- ленным на рычаге 10«
Шток 12 первого задатчика 13 для создания нагрузки на мышцу соединен с цилиндрической катушкой 21, несущей обмотку 22. Кзтушка 21 с обмоткой 22 закреплена в кольцевом зазоре 23 постоянного магнита 24 с помощью жесткого диффузора 25 с возможностью перемещения вдоль длинной оси препаратов 4 и 5.
Со штоком 12 соединен также первый датчик 26 перемещения концов мышцы,включающий оптронную пару (светодиод - фотодиод) 27S оптииеский канал которой перекрывается экраном 28/ закрепленным на штоке 12,
Электронный блок 2 устройства содержит первый сумматор 30, инвертирующий первый вход которого через ключ 31 соединен с выходом датчика 9 силы сокращений. Второй неинвертирующий вход сумматора 30 соединен через ключ 32 с выходом усилителя 33. Выход сумматора 30 соединен одновре
5
0
5
0
0
менно с регистратором 34 и входом 35 блока 36 формирования физиологического режима нагрузок. Выход блока 36 соединен одновременно с первым входом 37 второго сумматора 38 и через ключ 39 - с первым входом 40 третьего сумматора 41. Второй вход 42 сумматора 38 соединен с выходом (фотодиодом1) первого датчика 26 перемещения конца мышцы, сигнал от которого поступгет также на регистратор 34, а выход сумматора 38 подключен к обмотке 22 средства 13 для создания нагрузки на мышцы.
Второй вход 43 сумматора 41 через ключ 44 соединен с выходом (фотодиодом) измерителя 18, сигнал от которого поступает также на регистратор 34. Выход сумматора 41 соединен через низкоомное сопротивление 45 с обмоткой 15 управляемого маятника 11. Сопротивление 45 включено к входам 46 и 47 усилителя 33. Блок 36 является блоком формирования физиологического режима нагрузок. С его помощью задаются на входах 48-51 следующие параметры сокращения и расслабления миокарда: уровень постоянной составляющей постнагрузки; уровень преднагрузки; значение переменной составляющей постнагрузки; скорость растяжения мышцы.
Каждый из препаратов 4 и 5 может быть размещен в отдельной камере (не показано) с отдельными электродами, соединенными с электростимулятором (при необходимости через линию задержки) для того, чтобы осу- Q ществить индивидуальное фармако-фи- зиологическое и/или электрическое воздействия на каждый из препаратов.
Устройство для исследования механических свойств мышцы работает сле- § дующим образом.
Испытуемые препараты миокарда 4 и 5 помещают в камеру 2 с перфузи- рующим питательным раствором 3 (например, модифицированный раствор Кребса) и каждый из них жестко крепится одним концом к рычагу 10 управляемого маятника 11. Второй конец препарата 4 крепится к штоку датчика 9 силы сокращений, а второй конец препарата 5 - к штоку 12.
Перед началом исследования ключ 31 переводится в замкнутое состояние, тем самым соединяя выход измерителя 9 силы сокращения с первым вхо-
0
5
й
дом сумматора 30. Ключи 32,ЗУ и при этом находятся в разомкнутом положении. На входах 48-51, блока 36 для формирования требуемой физиологической нагрузки устанавливаются переменными сопротивлениями необходимые для условий исследования значения механических переменных: уровень постоянной и переменной составляющих постнагрузки, уровень пред- нагрузки и скорость растяжения мышцы
Включается стимулятор 8, от которого на электроды 6 и 7 подается импульс А напряжений (фиг.2), В ответ на воздействие (момент времени I на фиг,2) импульса стимулятора 8 препараты 4 и 5 начинают развивать механическое напряжение, которое преобразуется датчиком 9 силы сокращений в нарастающее электрическое напряжение, поступающее через замкнутый ключ 31 на первый вход сумматора 30. При этом на выходе сумматора 30 появляется нарастающее напряжение Б (фиг.2), соответствующее значению силы, суммарно развиваемой препаратами 4 и 5, и поступающее одновременно на регистратор 34 и вход 35 блока 36 формирования физиологической нагрузки.
Когда в момент времени II нарастающее напряжение Б на входе блока 36 достигнет установленного в этом же блоке напряжения, соответствующего постоянной составляющей постнагрузки (например, 0,4 Р3 , где Р0 - максимальное изометрическое при постоянной длине напряжение, развиваемое препаратами 4 и 5), на выходе блока 36 начинается формирование нарастающего электрического сигнала В (фиг.2) поступающего на первый Е.ХОД 37 сумматора 38 и с выхода последнего - на управляющий вход (обмотка 22) блока 13. При этом в обмотке 22 блока 13 появляется ток, обеспечивающий перемещение штока 12 с закрепленным на нем концом препарата 5 влево.
С момента времени II препараты 4 и 5 начинают укорачиваться, причем под общей нагрузкой, равной в данном случае 0,5 Р0 (0,4 Р0 - постоянная составляющая постнагрузки и 0,1 Р0 - переменная составляющая постнагрузки), установленной на входах 48 и 50 блока 36 формирования физиологической нагрузки на мышцы. Поскольку препа
.
оя
ю), м
666065
раты
10
Ц и 5 соединены последовательно, нагрузка 0,5 Р$ приходится на каждый из них. При этом на выходе датчика 26 перемещения появляется напряжение, соответствующее укорочению комплекса препаратов 4 и 5, поступающее одновременно на регистратор 34 и второй вход 42 сумматора 38.
Напряжение В на первом входе 37 сумматора 38 и напряжение на входе 42 этого же сумматора не отличаются друг от друга по форме. Обратная связь по перемещению (измеритель 15 26 - второй вход 42 сумматора 38 - блок 13) необходима лишь для более точного воспроизведения средством 13 напряжения В, сформированного блоком 36 и.поступающего на первый вход 37 сумматора 38.
По достижении комплексом препаратов 4 и 5 максимального укорочения ДЬ (момент вре мени III на фиг. 2), характерного для комплекса исследуемых препаратов миокарда, т.е. способных поднять на величину &L максимальный груз 0,5 Р0 , напряжение в
20
25
30
35
40
), комплексе препаратов 4 и 5 начинает изменяться, а именно уменьшаться (Б, момент времени III на фиг.2). При этом напряжение 8 на выходе блока 36 поддерживается постоянным, что обеспечивает расслабление препаратов 4 и 5 при постоянной длине всего образованного ими комплекса (В, период времени III-IV на фиг.2).
Когда сила препаратов 4 и 5 упадет до установленного на входе 49 блока 36 уровня преднагрузки (Б, момент времени IV на фиг.2), напряжение В на выходе блока 36 начнет уменьшаться до исходного значения. При этом комплекс препаратов 4 и 5 растягивается с заданной на входе 51 45 блока 36 скоростью до исходной длины (момент времени V на фиг.2) и весь цикл сокращение - расслабление комплекса препаратов 4 и 5 завершается. При появлении на выходе электро- 50 стимулятора 8 следующего импульса весь описанный ранее цикл повторяется (на фиг.2 не показано). После снятия необходимого количества циклов электростимулятор 8 отключается. На диаграмме Г (фиг.2) изображено изменение напряжения на выходе измерителя 18 перемещений рычага 10 управляемого маятника 11, которое свидетельствует о том, что длина каж55
дои из мышц Ц и 5 в ходе цикла -сокращения комплекса непрерывно меняется лаже в моменты времени 1-И и III- IV, когда длина комплекса препаратов 4 и 5 фиксирована (В, фиг.2). Это в свою очередь означает, что препараты 4 и 5 имеют различную сократимость и образуют совместно гетерогенную сис- тему.
Задача дальнейшего исследования заключается в том, чтобы установить влияет ли гетерогенность, следствием которой является непрерывное измене ние длины комплекса препаратов, на параметры сократимости каждого из о препаратов А и 5, образующих данную гетерогенную систему. Из сопоставления диаграмм Б, 8 и Г (фиг.2) сле1666065 8
41 , а с его выхода через низкоомный резистор 45 на управляемый вход (обмотка 15) управляемого маятника 11. При этом в обмотке 15 маятника 11 возникает ток, обеспечивающий перемещение рычага 10 в исходное положение. По мере того, как возрастает усилие,
дует в данном случае, что препарат 4,20 парата).
развиваемое препаратом 4 ток в катуш- 10 ке 15 увеличивается, что в свою очередь обеспечивает практически неизменной длину препарата 4 (перемещение рычага 10, необходимое для появления напряжения на выходе датчика 18 15 и, соответственно тока в обмотке 15 управляемого маятника 11 , определяется общим коэффициентом обратной связи и в данном случае составляют не более 0,5% от величины укорочения преИзменением напряжений на входах 48 и 50 блока 36 формирования физиологической нагрузки подбирают максимальный груз для препарата 4 таким образом, чтобы на выходе блока 36 в период времени II -III (В,на фиг.2 появилось напряжение, поступающее через замкнутый ключ 39 на первый вход 40 сумматора 41, а с его выхода через низкоомный резистор 45 - на обмотку 15 управляемого маятника 11, обеспечивающее перемещение рычага 10 на величину укорочения препарата 4 (41ч).
сокращающиися в условиях неоднородного комплекса, оказался способен поднять максимальный груз 0,5 Рй на величину , а препарат 5 этот же максимальный груз 0,5 РО поднял, на величину UL5, равную ДЬ - AL (В, фиг02)„ Таким образом, задача дальнейшего исследования сводится в конечном итоге к тому, чтобы установить какой максимальный груз может поднять препарат 4 на величину ДЦ, а препарат 5 на величину ДL5 в условиях самостоятельного сокращения, независимого от влияния гетерогенности.
Для этого ключи 31 s 39 и 44 устанавливаются в замкнутое положение, а ключ 32 - в разомкнутое. Включается стимулятор 8. В ответ на электрический импульс А стимулятора 8 прела рат 4 (момент времени l , Б, фиг.2) начинает развивать механическое напржение, значение которого преобразуется измерителем 9 силы сокраа1ений и поступает через замкнутый ключ 31 на первый вход сумматора 30, а с его выхода одновременно - на регистратор 34 и вход 35 формирователя 36 физиологической нагрузки на мышцу.
С момента времени I1 препарат 4 начинает развивать механическое напряжение Б, которое стремится переместить рычаг 10 управляемого маятника 11 влево. Однако при этом на выходе (фотодиод) датчика 18 перемещений рычага 10 появляется электрический сигнал, поступающий через замкнутый ключ 44 на второй вход 43 сумматора
развиваемое препаратом 4 ток в катуш- ке 15 увеличивается, что в свою очередь обеспечивает практически неизменной длину препарата 4 (перемещение рычага 10, необходимое для появления напряжения на выходе датчика 18 и, соответственно тока в обмотке 15 управляемого маятника 11 , определяется общим коэффициентом обратной связи и в данном случае составляют не более 0,5% от величины укорочения пре5
0
5
0
5
0
5
Изменением напряжений на входах 48 и 50 блока 36 формирования физиологической нагрузки подбирают максимальный груз для препарата 4 таким образом, чтобы на выходе блока 36 в период времени II -III (В,на фиг.2) появилось напряжение, поступающее через замкнутый ключ 39 на первый вход 40 сумматора 41, а с его выхода через низкоомный резистор 45 - на обмотку 15 управляемого маятника 11, обеспечивающее перемещение рычага 10 на величину укорочения препарата 4 (41ч).
Напряжение В с выхода блока 36 поступает также на первый вход 37 сумматора 38, тем самым обеспечивая перемещение«,штока 12 блока 13 также на величину ДЦ. Данная связь необходима, чтобы исключить влияние мешающей нагрузки на рычаг 10 со стороны препарата 5. В дальнейшем работа устройства и формирование сигналов в блоке 36 задачи физиологической нагрузки в моменты времени IIf-v аналогична ранее описанной работе в момент времени II - V.
Разница заключается в том, что характерные моменты времени определяются немеханииеским напряжением, развиваемым комплексом препаратов 4 и 5 а только препаратом 4. Причем маятник 11 выполняет роль средства для создания нагрузки на мышцу 4. После снятия требуемого числа циклов стимулятор 8 выключается.
Для того, чтобы выяснить какой механический груз может поднять пре парат 5 самостоятельно на величину ДЬ, ключи 31, 32 и А + устанавливают в замкнутое положение, а клю§ 39 в разомкнутое. Включается стимулятор 8. В ответ на импульс А препараты 4 и 5 начинают развивать механическое напряжение, которое действует на рычаг 10 маятника И. Причем препарат 4 стремится переместить -рычаг 10 маятника 11 влево, а препарат 5 - вправо. Результат перемещения рычага -10 определяется соотношением величин напряжений, развиваемых препаратами А и 5- В любом случае перемещение рычага 10 в каком-либо напралении, например влево (если препарат k сильнее препарата 5), на выходе дачика 18 (фотодиоде) появляется напряжение, поступающее через замкнутый ключ Й на второй вход 3 сумматора 1. При этом на его выходе появляется напряжение, поступающее через низ коомный резистор 5 на управляющий вход (обмотка 15) маятника 11. При этом в обмотке 15 маятника 11 возникает ток, обеспечивающий перемещение рычага 10 в исходное положение, т.е. вправо. По мере возрастания усилия, развиваемого результирующий силой со стороны препаратов и 5Г ток в обмотке 15 пропорционально возрастает
Значение возрастающего тока на обмотке 15-, соответствующее результирующей силе препаратов k v, 5 (в данном случае
), выделяется на
низкоомном сопротивлении. 5 и поступает на входы k6 и 7 усилителя 33 и усиливается.
С выхода усилителя 33 напряжение, пропорциональное результирующей силе - Р5, поступает через замкнутый ключ 32 на второй вход сумматора 30. Одновременно на первый инвертирующий вход этого -же сумматора 30 через замкнутый ключ 31 поступает напряжение с датчика 9 силы сокращений, сооветствующее значению механического напряжения, развиваемого препаратом k. Таким образом, на выходе сумматора 30 появляется нарастающее напря жение, соответствующее Р$- Р5, т.е. силе, паратом 5 (момент времени I Для случая,когда препарат 5 сильнее k и рычаг 10 маятника 11
Р5- Р4 развиваемой пре ,фиг.2)
препарата
D
0
5
0
5
0
5
0
5
перемещается вправо, результат сумми V
р«)
- Р4
рования выглядит так:
Р«ГВыделенное на выходе сумматора 30
напряжение, соответствующее развиваемому препаратом 5 усилию« поступает одновременно на регистратор 3 и на выход 35 блока 36 для формирования физиологической нагрузки (Б, фиг.2 период времени I/- II ).
Далее подбором напряжений на входах 48 и 50 блока 36 устанавливается нагрузка такой величины, которую препарат 5 смог бы поднять на величину Д L. При этом на выходе блока 36 появляется напряжение В (фиг.2), поступающее на второй вход k2 сумматора 38,а с его выхода - на обмотку 22 средства 13 для создания нагрузки на мышцу. При этом шток 12 начинает перемещаться влево, а препарат 5 укорачивается на величину flLj(период времени III, B)
В дальнейшем работа устройства в моменты времени II -V аналогична ранее описанной работе в моменты времени II - V. Отличие заключается
-r-rtl
в том. что характерные моменты II - т, a
V определяются механическим напряжением, развиваемым не комплексом препаратов k и 5, а только препаратом 5 Причем маятник 11 совместно с датчиком 9 выполняет роль измерителя силы сокращений препарата 5.
Формула изобретения
Устройство для исследования механических свойств мышц, содержащее по крайней мере одну камеру с физиологическим раствором и электродами, i
соединенными с злектростимулятором,первый задатчик механических нагрузок, датчик перемещения конца мышцы, датчик силы сокращения мышцы, выход которого через ключ соединен с первым входом первого сумматора, выход первого сумматора соединен с входом блока формирования физиологического ч режима нагрузок, выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом первого датчика перемещения конца мышцы, выход второго сумматора соединен с входом первого задатчика механических нагрузок, второй, третий и четвертый ключи, отличающ е е с я тем, что, с целью расширения области применения путем обеспечения исследования взаимодействия последовательно расположенных участков мышечной ткани, в него введены третий сумматор, второй задатчик ме-, ханических нагрузокvи второй датчик перемещения конца мышцы, выход которого через второй ключ соединен с пер- 10
вым входом третьего сумматора, второй вход которого через третий ключ соединен с выходом блока формирования физиологического режима нагрузок, выход третьего сумматора соединен с входом второго задатчика механических нагрузок и через четвертый ключ соединен с . вторым входом первого сумматора.
