руговязкого компонента мышцы, блок моделирования упруговязких свойств соединительной и сухожильной тканей выполнен из последовательно соединенных входного сумматора пропорцио-; нально дифференцирующего звена и согласующего усилителя, выход блока моделирования последовательного упруговязкого компонента мышцы соеди иен с первьш входом входного сумматора блока моделирования упруговязких свойств соединительной и сухожильной тканей, блок моделирования механических свойств внешней среды включает последовательно соединенные делитель напряжения, первый и , второй интеграторы, второй вход первого интегратора соединен со средним вьшодом потенциометра задания ускорения силы тяжести, крайние выводы которого подключены соответственно к шине нулевого потенциала и шине Питания, выход второго интегратора блока моделирования механических свойств внешней среды подключен к входу второго формирователя параболического напряжения и через третье пропорционально дифференцирукяцее звено - к пятому входу сумматора, выход согласующего усилителя блока моделирования упруговязких свойств соединительной и сухожильной тканей подключен к входу делителя напряжения блока моделирования механических свойств внешней среды, выход второго формирователя параболического напряжения через четвертое пропорционально дифференцирующее звено соединен с шестым входом сумматора.
с управляющим входом блока моделирования последовательного упруговязкого компонента мышцы и с инфорационным входом блока-моделирования параллельного упруговязкого компонента мьшщы, выход которого через инвертирующий усилитель подключен к второму входу входного сумматора блока модепирования упруговязких свойств соединительной и сухожильной тканей, каящый блок моделирования параллельного и последовательного упруговязкого компонента мьшпщ содержит четьфе ма сштабирукнцих резистора, разделительный конденсатор и элемент с односторонней проводимостью, информационный вход каждого блока моделирования параллельного и последовательнбго упруговязкого , компонента через последовательно соединенные масштабирукшщй резистор и разделительный конденсатор подключен к входу элемента с односторонней проводимостью, выход которого соединен с выходом блока и через второй масштабирующий резистор с шиной нулевого потенциала, управляющий вход каждого блока моделирования параллельного и последовательного упруговязкого компонента через третий масштабирукщий резистор подключен к входу элемента с односторонней проводимостью, один вьшод четвертого масштабирукщего резистора соединен с информационным входом блока, другой вывод четвертого масштабирукщего резистора подключен к выходу элемента с односторонней проводимостью.



| название | год | авторы | номер документа |
|---|---|---|---|
| Модель мышцы | 1982 |
|
SU1029761A1 |
| Устройство для моделирования нейронных структур двигательного аппарата | 1986 |
|
SU1585809A1 |
| Модель мышцы | 1978 |
|
SU765825A1 |
| Модель рецептора-мышечного веретена | 1987 |
|
SU1511752A1 |
| Способ стимуляции мышц спортсменов в процессе тренировки и устройство для его осуществления | 1982 |
|
SU1174026A1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Устройство для моделирования линии электропередачи | 1988 |
|
SU1674179A1 |
| Устройство для исследования упруговязких свойств мышц | 1983 |
|
SU1124923A2 |
| БИЬ./ | 1973 |
|
SU389528A1 |



МОДЕЛЬ МЬШЩЫ, содержащая сумматор, пороговый элемент, блок моделирования функций электромеханического преобразования мьппечного волокна, выполненный из п последовательно соединенных интегриругацих усилителей, причем в обратную связь каждого из (п-1)-х интегрирующих усилителей включен соответствующий резистор, выход сумматора через пороговьй элемент соединен с первым входом первого интегрирукщего усилителя блока моделирования функций электромеханического преобразования а пвечного волокна, выход п-го интегрирующего усилителя которого подключен к выходу первого формирователя параболического напряжения, к входу первого пропорционально дифференцирующего звена и к одному выводу потенциометра блока моделирования функций электромеханического преобразования мьшечного волокна, второй вывод которого подключен к шине нулевого потенциала,, средний контакт потенцио- . метра соединен с вторым входом первого интегрирующего усилителя блока моделирования функций электромеханического преобразования № Ш1ечного волокна, выход первого формирователя параболического напряжения соединен через второе пропорционально дифференцирующее звено с первым входом сумматора, второй и третий входы которого подключены к выходу первого пропорционально дифференцирующего звена и к потенциометру задания мембранного потенциала соответственно, отличающаяся тем, что, с целью повышения точности моделирования, в него введены интегрирующий усилитель, потенциометр задания ускорения силы тяжести, второй формирователь параболического напряжеО) ния, третье и четвертое пропорционально дифференцирующие звенья, блок моделирования параллельного упруговязкого компонента , блок моделирования последовательногр упруговязкого компонента мышцы, блок моделирования упруговязких свойств соединительной и сухожильной тканей, , О) блок моделирования механических 4 свойств внешней среды и блок модели sj рования функции нервно-мышечного сиN О) напса, вьтолненный в виде последова- тельно соединенных одновибратора, . , интегратора и формирователя колоколообразного импульса, выход которого подключен к четвертому входу сумматора, выход п-го интегрирующего усилителя блока моделирования функций электромеханического преобразования мьппечного волокна соединен -с управлягн им входом блока моделирования параллельного упруговязкого компонента мышцы и с информационным входом блока моделирования последовательного уп
Изобретение относится к моделированию биологических систем и Может использоваться ка:к объект при исследовании нейрональных механизмов управления мьш ечным сокращением и для изучения биофизических факторов, меняющих характеристики сокращения работающей мышцы.
Цель изобретения - повьш1ение точности модепирования процессов, протекающих в мышечном волокне при изменении длины мьш1цы, повышение точности воспроизведения нелинейной зависимости преобразования активного и пассивного напряжений в зависимости от длины мышцы и приближения ее характеристик к характеристикам сокращения реальной мьшщы во всем диапазоне длин.:
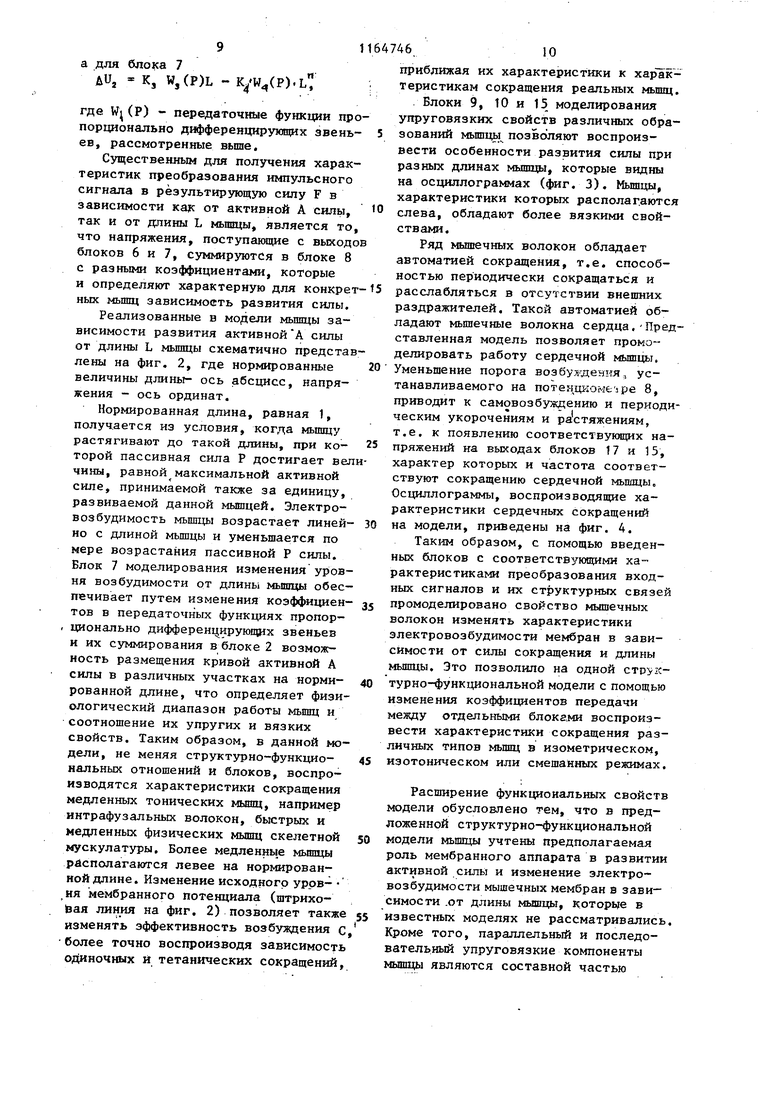
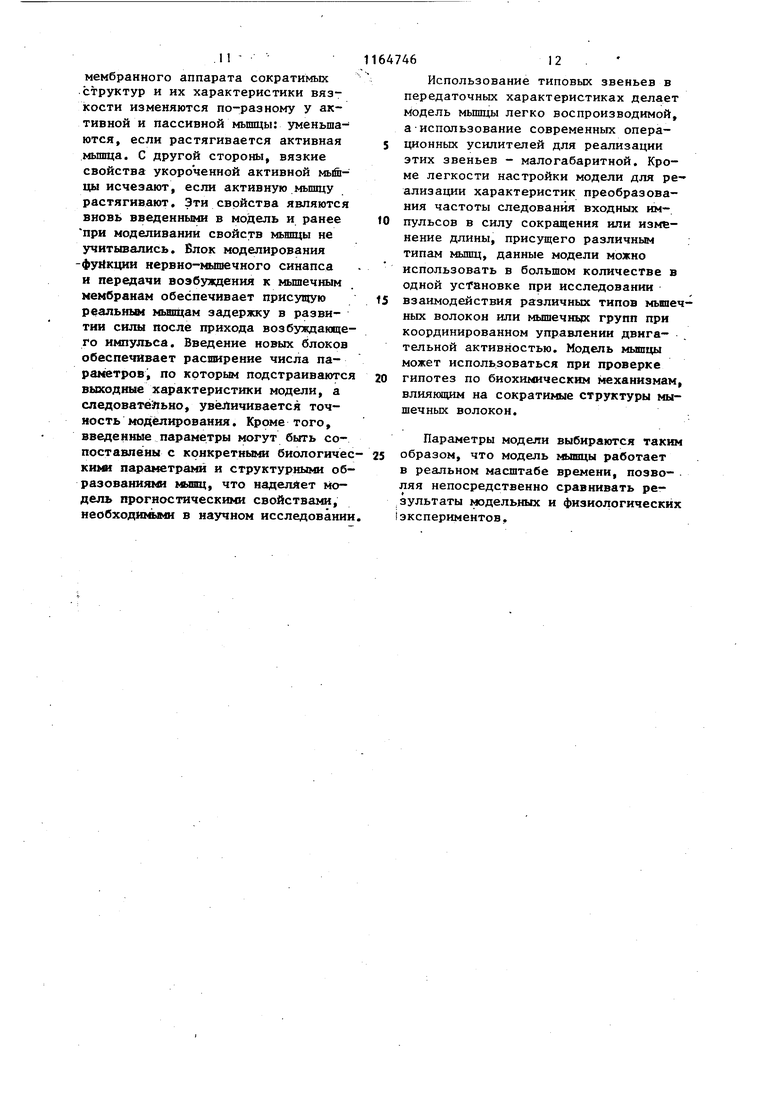
На фиг. 1 изображена схема модели на фиг. 2 - графики формирования активной А силы в зависимости от длины мышцы, пассивной Р силы и уровня возбудимости; на фиг. 3 - графики развития активной силы при разных длинах мьппцы и при разных частотах стимуляции; на фиг. 4 - воспроизведение в модели сокращения сердечной мьш1цы (изменение мембранного потенциала, длина мышцы, сила сокращения раздражаяяций стимул, отметка времени 1 с). Модель содержит блок t моделирования функции нервно-мышечного п си нала, блок 2 моделирования электровозбудимых свойств мышечных мембран (СОСТОЯЩИЙ из сумматора 3 и порогово го элемента 4, блок 5 моделирования функции электромеханического преобразования, блок 6 моделирования изменения уровня возбудимости в зависимости от активной силы и скорости ее изменения, блок 7 моделирования изменения уровня возбудимости в зав симости от длины мьшцы и скорости изменения ее длины, потенциометр 8 задания исходного значения мембранного потенциала, блоки 9 и 10 моделирования упруговязких свойств соот ветственно последовательного и, параллельного компонентов мьшцы с информационными входами 11 и 12 и управлякщими входами 13 и 14 соответ- ственно блок 15 моделирования упру говязких свойств соединительной и сухожильной тканей с выходом 16 Си мышцы модели, блЪк 17 моделирования механических свойств внешней среды с выходом 18 Длина мьшпда мо дели, инвертирующий усилитель 19. Блок 1 состоит из одновибратора 20, интегратора 21 и формирователя 22 колоколообразного импульса. Блок 5 содержит интегрирующие усилители 23 и потенциометр 24, 6 и 7 со- держат формирователи 25 параболического напряжения и по два пропорционально дифференцирующих звена 26 Блок 15 содержит входной сумматор 27, пропорционально дифферёнцируницее звено 28 и согласукяций усилитель 29. Блок 17 состоит из делителя 30 напряжения, первого интегратора 31 с потенциометром 32 задания ускорения силы тяжести и второго интегратора 33. Блоки 1 и 7 содержат входы и выходы 33-36. Блоки 10 и 9 содержат первый, второй, третий и четвер тьй масштабирующие резисторы 37-40, .эл мент 41 с .односторонней .проводи64мостью и разделительный конденсатор 42. Кроме того, каждый блок 26 соДержит разделительный конденсатор 43 и резисторы 44; каждьй блок 25 содержит усилитель 45, вариатор 46, резисторы 47. Одновибратор 20 содержит входной конденсатор 48, усилитель 49, конденсатор 50 обратной связи и резисторы 51; интегратор 21 содержит накапливающий конденсатор 52 и резисторы 53; формирователь 22 содержит входной диод 54, усилитель 55, конденсатор 56 накопительньй, разрйдный диод 57 и резисторы 58; сумматор 3 содержит входные резисторы 59, резистор 60 обратной связи и усилитель 61; пороговый элемент состоит ,из диода 62 и резистора 63; интегратора 23 блока 5 содержат входные резисторы 64, интегрирующие конденсаторы 65, резисторы 66 обратной связи и усилители 67; инвертирз кяций усилитель 19 содержит усилитель 68, входной резистор 69 и резистор 70 обратной связи; входной сумма тор 27 блока 15 содержит входные резисторы 71, усилитель 72 и резистор 73 обратной связи; звено 28 блока 15 содержит входные резисторы 74, конденсатор 75, диод 76 и выходной резистор 77; согласующий усилитель 29 блока 15 содержит операционный усилитель 78, входной резистор 79 и ре-. зистор 80 обратной связи; делитель 30 блока 17 содержит усилитель 81, входные резисторы 82, резистор 83 обратной связи и ключи 84; интеграторы 33 и 31 блока 17 содержат усилители 85, накапливающие конденсаторы 86 и входные резисторы 87. Модель работает следующим образом. Модель позволяет исследовать .работу мьшцы в нескольких режимах, соответствующих активному и пассивному состоянию мышцы. I. В исходном состоянии, когда мьшща пассивна, т.е. на входе 34 отсутствует входной импульсный поток, на выходах блоков 1, 2, 5, 6и9 напряжение равно нулю. Работает контур, включанйщй блоки 9, 10, 15 и 17. В этом случае напряжение, соответствукщее длине мышцы, поступает на вход блока 7, на выходе 35 которого формиуется сигнал, кот-орый, пройдя блоки 10, 19 и 15, изменяется на выходе 1б модели как кривая Р пассивного развития силы, зависимость которой пред- ставлена на фиг, 2, Если изменять . длину мьшщы с различными скоростями то пропорционально дифференцирукяцие звенья к постоянной составляющей добавляют напряжение, пропорциональное скорости изменения длины мышцы. Реальное дифференцирующее звено имеет стандартную передаточную функцию где Т RC - постоянная дифференцирования. Звено с пропорциональной составля ющей имеет передаточную функцию К ТЗР W (Р) : 1 « т„ 1 Т, где Т, Tj(1 + К), т.е. кроме переменной составляющей, отражающей скорость изменения длины сигнал на выходе блоков 9, 10 и 19 и 15 будет также пропорционален и длине мышцы. II. Если длина мышцы ие фиксируется, т.е. принудительно не задается напряжение, соответствующее определенной длине мышцы, то в модели во производится динамический режим рабо ,ты пассивной , В этом случае пе ременной величиной является масса гр зов, которые может удерживать пассив ная мышца, растягиваясь пйд действи- ем этихгрузов. В модели массы грузо задаются в блоке 17 моделирования ме ханических свойств внешней среды делителем 30, в котором с целью упрощения принципиальной схемы масса моделируется набором резисторов на вхо де операционного усилителя. Делитель 30 осуществляет операцию делени исходя из следующих соображений. Коэффициент усиления операционного усилителя выражается формулой или К Можно записать, что выходное на пряжение и, равно К{Ц UB . Согласно закону Ньютона физические величины: сила F масса m и ускорение а, связаны следующей зависимостью:F ша или а - . m Сопоставляя это вьфажение с зави-, симостью напряжения Ug,j,oT Uj, проводим следующую аналогшо: а; «ае ъ F , R т.е. при постоянстве сопротивления 6 с х интерпретируется как сила F, воздействукщая на вход блока 17 и развиваемая мышечным волокном, Rg является массой грузов, которую должна поднимать мышца, причем чем больше входное сопротивление, тем больше масса грузов, а входное напряжение Ugy пропор1Щонально Ускорению, которое сообщает мьшца при взаимодействии с грузом. Далее ускорение, сообщаемое мьшщей определенной массе груза сопоставляется с величиной напряжения, устанавливаемого на потенциометре 32, соответствуклцего ускорению силы тяжести (например, земной или любой другой, включая случай невесомости). В результате интегрирования в соответствии с законами физики напряжение на выходе интегратора интерпретируется как скорость, сообщаемая грузу, Дальнейшее интегрирование скорости дает физическую величину перемещения, которая в нашем случае соо- ветствует длине мьш1цы. Таким образом, в замкнутой цепи блоков 9, 10, 19, 15 и 17 поддерживается динамическое равновесие, в котором пассивная Р сила уравновешивает груз при определенной длине мышцы. Длина мьш1цы L(t) j V(t)dt, скоость укорочения или растяжения (t) |(й - a(t))clt, где g - ускоение силы тяжести; ai(t) Равновесие вьтолняется при услоии равенства нулю разности g-a(t). сли масса m увеличивается, уменьшатся ускорение a(t) и.возникшаяая азность в подинтегральном выражеии скорости в соответствии с форулами вызьшает удлинение мышцы. длинение мьшщы вызывает увеличение ассивной силы Р и увеличение ускоения a(t) до прежней величины, огда вновь система приходит в равовесие, но уже при большей длине . Уменьшение массы груза при. .7 водит к увеличению ускорения a(t), которое вызьшаег укорочение мьшщы и уменьшение пассивной Р силы. Вновь наступает равновесие при новой длине мышцы. III. Когда поступает импульсный сигнал на вход 34, на выходах блоков 1, 2, 5, 6 и 9 появляются напряжения, отражающие активное состояни €ышцы. В этом случае в модели замыкаются новые контуры регулирования, способствующие формированию характеристик сокращения, присущих реаль ной мьшще, во всем диапазоне длин. . Один из контуровf охватьшающих блоки 4, 5 и 6, реализован в прототипе и способствует формированию нелинейной характеристики развития активной силы от частоты раздражающих импульсов. Контур, включающий блоки 5, 9, 15, 17 и 7 и вновь блок 2 через связи 35 и 36, обеспечивает формирование нелинейной зависимости равзития активной А силы от длины мышцы. Кроме того, в модели реализованы контуры управления, изменяющие соотношения упруговязких свойств последовательного упруговязкого компонента мьшщы в зависимости от длины управление по входу 19 блока 9, и соотношение упруговязких свойств параллельного упруговязкого компонента мышцы - управление по входу 1 на блок 10. В этом случае напряжения, поступающие на входы 19 и 14 блоков 19 и 10 моделирования свойст последовательного и параллельного упруговязких компонентов мышцы, запирают диоды и препятствуют прохож- ; дению переменной составляющей про: порционально дифференцируюгцих звень- ев, причем идет постоянное сравнение значения переменной составляющей и запирающего напряжения. 11ревьш1ение запирающего диоды упi| равляющвго напряжения над переменной составляющей делает мьш1цу более упругой. Если переменная составляющая пропорционально дифференцирующего ,звена больше запирающего напряжения, то в модели проявляются вязкие свойства мьштечного волокна тем большие, чем больше превьш1ает переменная составляющая уровень управляющего напряжения . Если управляющее напряжение равно нулю, то в модели воспроизводятся .вязкие свойства, присущие .реальной мьшиде и выявляемые в соот468ветствзтощих физиологических экспериментах. В активном состоянии так же моделируются условия работы мьпоцы, как и при пассивной мьшще, которые задаются изменением параметров в блоке моделирования механических свойств внешней среды, В этом случае результирукщая сила, развиваемая мьштечным волокном и направленная на его укорочение, складывается в В1аде суммы активной А и пассивной Р сил, т.е. Е. А + Р., Приходящий по входу 34 11мпульс дифференцируется и формируется на одновибраторе 20 в импульс постоянной длительности и амплитуды, параметры которого не зависят от параметров входного сигнала. Сформированный одновибратором импульс интегрируется на интеграторе 21, а превышающая пороговое значение часть сглаженного интегратором импульса поступает на формтфователь 22, на выходе которого образуется ..импульс колоколообразной формы, поступающий на вход блока 2 моделирования электровозбудимых свойств мышечных мем- бран. Таким образом преобразование в блоке моделирования функции нервно-мьш1ечного синапса соответствует процессам электрохимического преобразования и задержки в синапсе н распространению медиаторов по-мембранному аппарату мьш1ечного волокна. Сформированньп колоколообразный импульс поступает в блок 2, где его величина суммируется с сигналами, поступающими по другим входам с учетом предварительно установленного начального значения мембранного потенциала на потенциометре 8. Значение импульса, превьштающее порого-. вое значение, воздействует на блок 5. Таким образом эффективное значение импульса, приводящее к развитию активного сокращения, зависит от напряжений на выходах блоков 6 и 7 моделирования изменения уровня возбудимости в зависимости соответственно от активной силы и скорости ее изменения и от длины мьшщы и скорости изменения ее длины. Для блока 6 зависимость изменения уровня возбудимости выражается фор- нулей« uU iqW(P)A - Kj, W,,(P)A , а для блока 7 AUj К, W,(P)L - (P).L где W(Р) - передаточные функции про порционально дифференцирумцих звеньев, рассмотренные выше. Существенным для получения характеристик преобразования импульсного сигнала в результирующую силу F в зависимости как от активной А силы, так и от длины L мьшщы, является то что напряжения, поступающие с выходо блоков 6 и 7, суммируются в блоке 8 с разными коэффициентами, которые и определяют характерную для конкрет ньк мышц зависимость развития силы. Реализованные в модели мышцы зависимости развития активнойА силы от длины L мышцы схематично представ лены на фиг. 2, где нормированные величины длины- ось абсцисс, напряжения - ось ординат. Нормированная длина, равная 1, получается из условия, когда мьшщу растягивают до такой длины, при которой пассивная сила Р достигает вел чины, равной максимальной активной силе, принимаемой также за единицу, развиваемой данной мышцей. Электровозбудимость мьппцы возрастает линейно с длиной мьшцы и уменьшается по мере возрастания пассивной Р силы. Блок 7 моделирования изменения уровня возбудимости от длины мышцы обеспечивает путем изменения коэффициентов в передаточных функциях пропор, ционально дифференг ирующих звеньев и их суммирования в блоке 2 возможность размещения кривой активной А силы в различных участках на нормированной длине, что определяет физиологический диапазон работы мышц и соотношение их упругих и вязких свойств. Таким образом, в данной модели, не меняя структзфно-функциональных отношений и блоков, воспроизводятся характеристики сокращения медленных тонических мьшщ, например интрафузальных волокон, быстрых и медленных физических мыпщ скелетной мускулатуры. Более медленны е мышцы располагаются левее на нормированной длине. Изменение исходного уррв- ня мембранного потенциала (штрихойая линия на фиг. 2) позволяет также изменять зффективность возбуядения с более точно воспроизводя зависимость одиночных и тетанических сокращений 4610 приближая их характеристики к xaplicтеристикам сокращения реальных мьшщ. Блоки 9, 10 и 15 моделирования упруговязких свойств различных образований мьш1ЦЬ1 позволяют воспроизвести особенности развития силы при разных длинах мышцы, которые видны на осциллограммах (фиг. 3). Мьш1цы, характеристики которых располагаются слева, обладают более вязкими свойствами. Ряд мышечных волокон обладает автоматией сокращения, т.е. способностью периодически сокращаться и расслабляться в отсутствии внешних раздражителей. Такой автоматией обладают мышечные волокна сердца,Представленная модель позволяет промоделировать работу сердечной мышцы. Уменьшение порога возбуждения,, устанавливаемого на потенц гомезре 8, приводит к самовозбуждению и периодическим укорочениям и растяжениям, т.е, к появлению соответствукжщх напряжений на выходах блоков 17 и 15, характер которых и частота соответствуют сокращению сердечной мышцы. Осциллограммы, воспроизводящие характеристики сердечных сокращений на модели, приведены на фиг. 4, Таким образом, с помощью введенных блоков с соответствующими характеристиками преобразования входных сигналов и их структурных связей промоделировано свойство мышечных волокон изменять характеристики электровозбудимости мембран в зависимости от силы сокращения и длины мышцы. Это позволило на одной структурно-функциональной модели с помощью изменения коэффициентов передачи между отдельными блоками воспроизвести характеристики сокращения различных типов мьшщ в изометрическом, изотоническом или смешанных режимах. Расширение функциональных свойств модели обусловлено тем, что в предложенной структурно-функциональной модели мьшщы учтены предполагаемая роль мембранного аппарата в развитии активной силы и изменение злектровозбудимости мышечных мембран в зависимости .от длины мышцы, которые в известных моделях не рассматривались. Кроме того, параллельный и последовательный упруговязкие компоненты мышцы являются составной частью
. 11 -
мембранного аппарата сократимых структур и их характеристики вязкости изменяются по-разному у активной и пассивной мьшщы: уменьшаются, если растягивается активная мьшща. С другой стороны, вязкие свойства укороченной активной мыйцы исчезают, если активную мьшщу растягивают. Эти свойства являются вновь введенными в модель и ранее при моделиваиии свойств мьшщы не учитывались. Влок моделирования -функции нервно-мышечного синапса и передачи возбуждения к мышечным мембранам обеспечивает присущую реальшш мьвщам задержку в развитии силы после прихода возбуждающего импульса. Введение новых блоков обеспечивает расширение числа параметров, по которым подстраиваются выходные характеристики модели, а следовательно, увеличивается точность моделирования. Кроме того, введенные параметры могут быть сопоставлены с конкретными биологичес кими параметрами и структурными образованиями hOAoit, что наделяет модель прогностическими свойствами, необходшшми в научном исследовании
16474612
Использование типовых звеньев в передаточных характеристиках делает модель мьшщы легко воспроизводимой, а использование современных операционных усилителей для реализации этих звеньев - малогабаритной. Кроме легкости настройки модели для ре- ализации характеристик преобразования частоты следования входных им-
10 пульсов в силу сокращения или изменение длины, присущего различным типам мышц, данные модели можно использовать в большом количестве в одной установке при исследовании
15 взаимодействия различных типов мьшечных волокон или мышечньрс групп при координированном управлении двигательной активностью. Модель мышцы может использоваться при проверке
20 гипотез по биохимическим механизмам, влияющим на сократимые структуры мышечных волокон..
Параметры модели выбираются таким 25 образом, что модель мышцы работает в реальном масштабе времени, позволяя непосредственно сравнивать результаты модельных и физиологических iэкспериментов.
J
ft
фиг.З
vmtwrmr
Изменение
МП
Длина
-iUUlUiUUСила
Стимул .
1с I1
ие. f
| Модель мышцы | 1978 |
|
SU765825A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Модель мышцы | 1982 |
|
SU1029761A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
