Изобретение относится к автоматике и вычислительной технике и может быть использовано для определения погрешности вращающегося трансформатора.
Целью изобретения является повышение точности измерения погрешности.
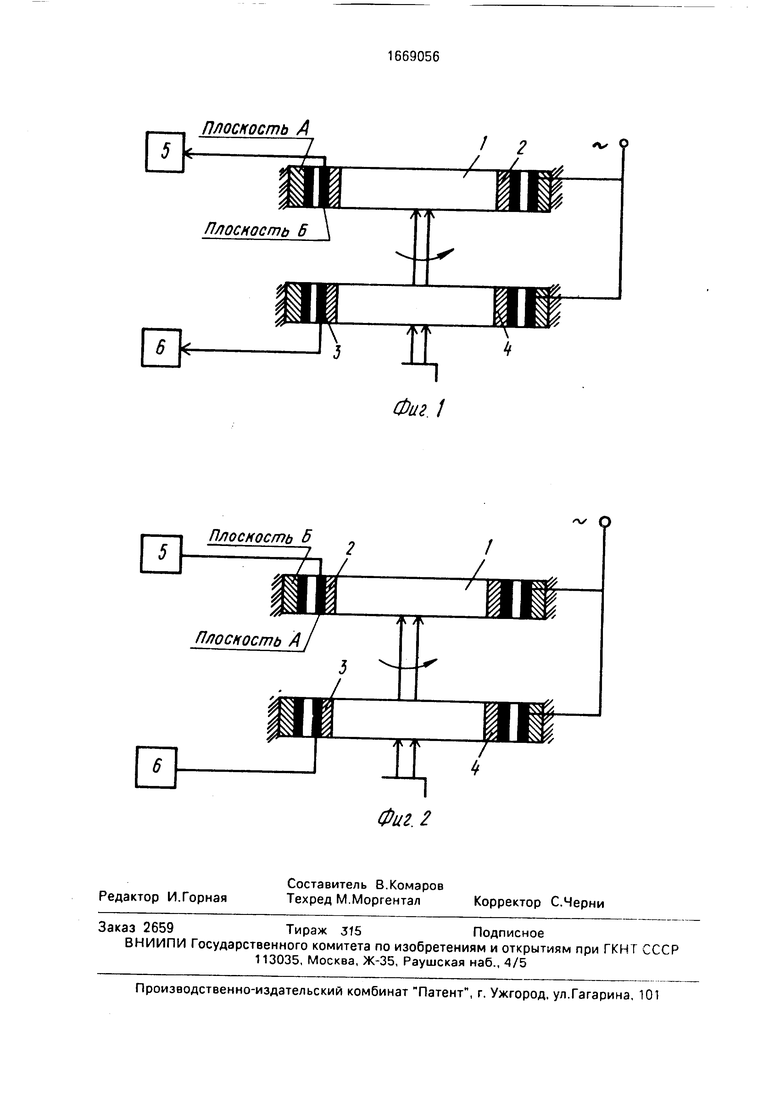
На фиг.1 схематично показано расположение датчика положения (ДП) и вращающегося трансформатора (ВТ) при измерении погрешности при первой серии отсчетов; на фиг.2 - то же, при второй серии отсчетов.
Устройство, реализующее способ, содержит ДП 1, ротор 2 которого кинематически связан с ротором 3 контролируемого ВТ 4, К обмотке статоров ДП 1 и ВТ 4 подводят напряжение питания, с обмотки роторов 2 и 3 напряжения регистрируют с помощью регистрирующих устройств (РУ) 5 и 6. В качестве ДП 1 используют электромеханическую шкалу с высокой точностью расположения нулевых точек, при этом погрешность расположения нулевых точек носит характер первой гармоники и имеет вид
Д Am sin a, где Дт - амплитуда погрешности.
В качестве РУ 5 может быть использован микровольтметр,а РУ 6 - аналого цифровой преобразователь.
Измерение погрешности ВТ проводят в следующей последовательности.
Предварительно устанавливают на нуль ДП 1 и ВТ 4. Поворачивают роторы 2 и 3 ДП 1 и ВТ 4 в пределах угла 0-360°, задавая yi ол с помощью регистрации РУ 5 нулевых положений ДП 1. Отсчет погрешности в 1-х положениях ВТ 4 проводят по РУ 6. при этом с РУ 6 снимают отсчеты, равные
А, +ДвТ|.
где Р - число полюсов ДП 1;
Дет погрешность ВТ в i-x положениях, ,1,2Р-1.
о о ю о ел о
После проведения первой серии измерений имеют следующие значения
АО - Авто .
А, - Ал sin + Дет1 , AP-I - An sin °- (Р - 1) + An (P-I) .
Затем переворачивают ДП 1 и проводят вторую серию замеров, при этом ВТ 4 поворачивают в том же направлении, что и в первой серии, и погрешность ВТ 4 в 1-х положениях имеет то же значение, что и в первой серии. Погрешность ДП 1 в 1-х положениях изменяет свой знак на противоположный, так как ротор 2 ДП 1 относительно статора вращает в обратном направлении, при этом с РУ 6 снимают отсчеты А, равные
AI - - Дт sin -3- I + Дет .
В результате после проведения второй серии отсчетов имеют следующие результаты
Ао1- Ai -- Дт sin
Авто , 360°
+ Двт1.
360°
А(Р-1) - - Ал Sin - (Р - 1) -I- Азт (Р-1)
Для определения погрешности ВТ каждом 1-м положении определяют поусумму результатов измерений в первой второй сериях
Ар + Ар А
.
AI + AI 1 ГА . 360° ,
- (An sin -- + Двт1 -Ат,8Ш +Азт1)Авт1.
АЈН)(Р- 1
22 дт5|Пз(р-1) +
ЧйЛ° + Двт(Р-1)-Дт8Ш - () +
+ Аэт(р-1) Ан(р-1).
Таким образом, определяют погрешность ВТ во всех 1-х положениях. Погрешность ДП в первой и второй сериях имеет
две составляющие: систематическую и случайную. Систематическая погрешность ДП в двух сериях имеет одинаковые значения, но разные знаки и зависит от изготовления ротора и статора ДП. Случайная составляющая погрешности зависит от точности задания углов, т.е. от точности расшифровывающего устройства (РУ) - микровольтметра, от точности работы оператора и т.д. Случайная составляющая может
быть значительно уменьшена повышением числа измерений.
Пример реализации способа приведен в таблице.
Из таблицы видно, что в результатах
измерений отсутствует погрешность ДП. Формула изобретения Способ измерения погрешности вращающегося трансформатора, основанный на сравнении сигналов путем поворота датчикэ положения и контролируемого вращающегося трансформатора на ряд углов в пределах 0-360° и измерения суммарной погрешности датчика и вращающегося трансформатора, отличающийся тем, что, с
целью повышения точности измерения погрешности, проводят вторую серию измерений, суммарной погрешности датчика положения и вращающегося трансформатора после поворота датчика положения на
180° относительно вращающегося трансформатора, а погрешность вращающегося трансформатора определяют как полусумму измеренных погрешностей обеих серий отсчетов.
Плоскость А
I
Плоскость В
9
/
7«
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля многополюсного вращающегося трансформатора | 1988 |
|
SU1647787A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Двухотсчетный вращающийся трансформатор | 1988 |
|
SU1674326A1 |
| Двухканальный вращающийся трансформатор | 1987 |
|
SU1467685A1 |
| Двухотсчетный вращающийся трансформатор | 1988 |
|
SU1594657A1 |
| Двухканальный вращающийся трансформатор | 1987 |
|
SU1432674A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1646023A1 |
| Двухотсчетный вращающийся трансформатор | 1989 |
|
SU1702492A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для определения погрешности вращающегося трансформатора. Цель изобретения - повышение точности способа измерения погрешности. Цель достигается тем, что в способе контроля вращающегося трансформатора, основанном на сравнении сигналов датчика положения и контролируемого вращающегося трансформатора при их повороте на угол 0 - 360°, после первой серии измерения датчик переворачивают, проводят вторую серию и по их результатам определяют погрешность. 1 табл., 2 ил.
Плоскость 5
/
Фиг. /
/
/
/
| Способ испытания вращающегося трансформатора | 1974 |
|
SU545042A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения погрешности вращающегося трансформатора | 1973 |
|
SU544060A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
