Изобретение относится к автоматике и вычислительной технике и может быть использовано для определения погрешности многополюсных вращающихся транс Ьор- маторов (ВТ).
Целью изобретения является упрощение способа контроля.
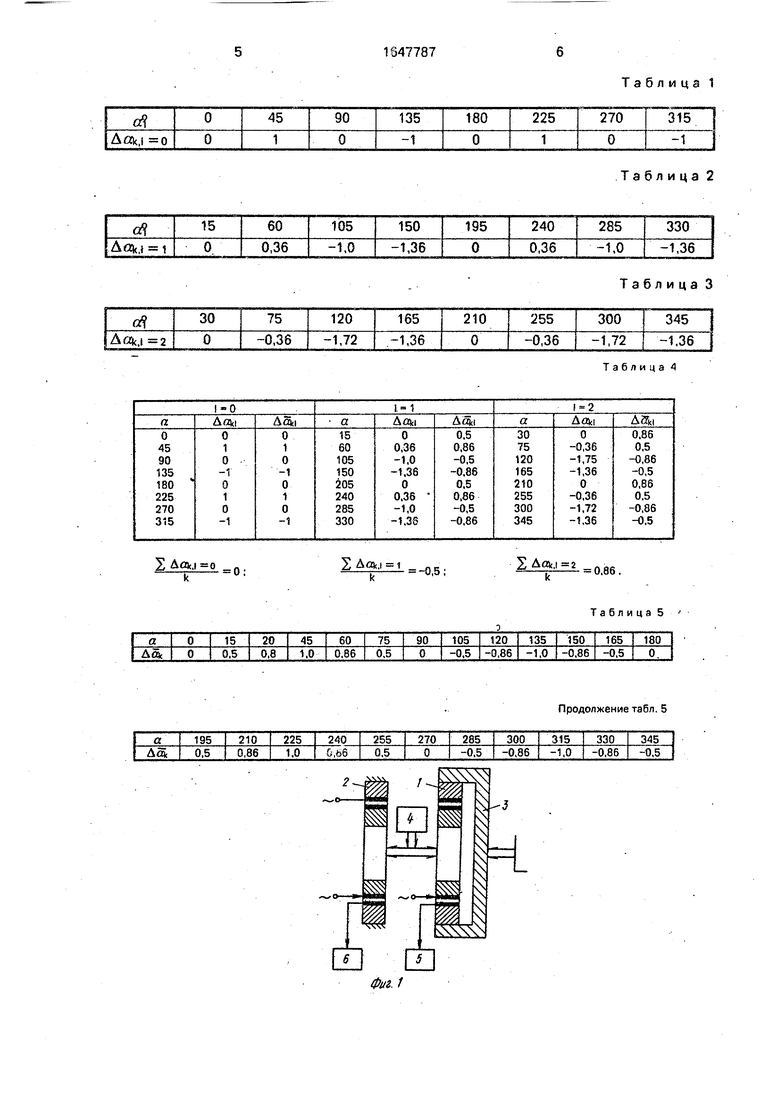
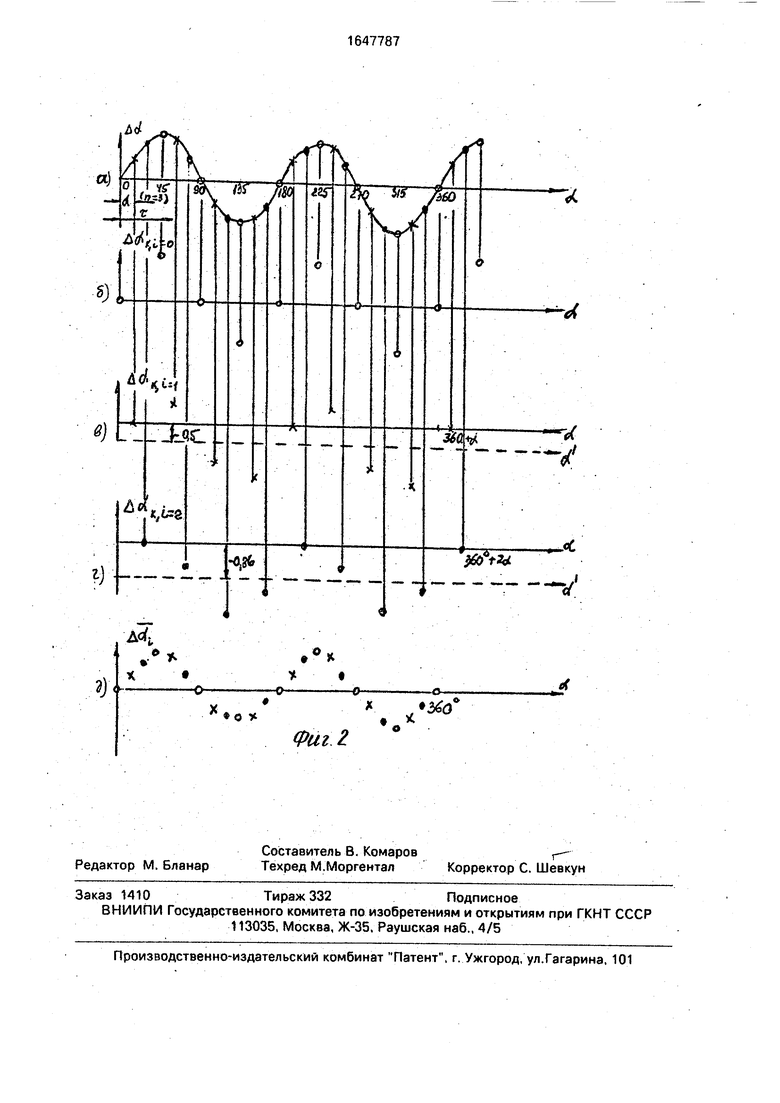
На фиг. 1 изображено устройство для реализации способа; на фиг. 2 - графики-погрешности контролируемого ВТ.
Устройство (фиг.1) содержит датчик 1 положения (ДП), на валу которого установлен ротор 2 контролируемого ВТ. В качестве датчика положения используют электромеханическую шкалу с высокой точностью расположения нулевых точек. Статор ДП 1 соединен с приводом 3 поворота статора. Роторы ДП 1 и ВТ 2 подключены к приводу 4 поворота роторов. Выходные обмотки ДП 1 и ВТ 2 подключены к регистрирующим
устройствам (РУ) 5 и 6. К входным обмоткам ДП 1 и ВТ 2 подключены источники питающего напряжения.
На фиг. 2 показаны график погрешности контролируемого ВТ (а), значения погрешности Aoki , определенные в первой, второй и третьей сериях (а-2) действительные значения погрешности, измеренные при контроле ВТ (д).
При описании спосаба примем амплитуду До™ погрешности контролируемого ВТ, равной Да™ 1,0, п 3; фазу погрешности f 0,г 45°.
Способ осуществляют следующим образом.
Предварительно устанавливают в нулевые положения ДП 1 и ВТ 2. С помощью ДП последовательно через угол г поворачивают роторы ДП 1 и ВТ 2 в пределах угла
О
Јь VI VJ 00
VI
0-360°-г и по АЦП производят отсчет погрешности Д#ю 0 (фиг.2б).
При принятых допущениях (А«ь 1,0; p Q) имеют значения указанные в табл. 1.
Затем, проводя отсчет по шкалам АЦП 6, поворачивают роторы ДП 1 и ВТ 2 на угол г/3 15°. Доворачивают статор ДП 1 до положения, при котором на микровольтметре установится нулевой отсчет. Через угол г поворачивают роторы ДП 1 и ВТ 2 в пределах угла от 15° до 360°+ 15° и производят отсчет погрешности (фиг. 2в, табл,2).
Аналогично поворачивают роторы на 30° и производят отсчет погрешности (фиг.2г, табл.3).
В результате в каждой серии измерений определяют значения погрешности A aid относительно начального положения каждой серии, т.е. относительно 0,15° и 30°.
Погрешности каждого контролируемого положения относительно нулевого определяют по формуле
AOki
К
О)
Эта формула основана на том, что сумма погрешности датчика угла в пределах 0-360° равна нулю. В результате расчета по формуле (1) получают значения, приведенные в табл. 4.
Проделанные операции для второй и третьей серии соответствуют смещению оси а на 0,5 и 0,86 (фиг. 2в и г, оси а представлены штриховыми линиями).
В результате получают значения погрешности контролируемого ВТ 2 через 15° относительно нулевого положения (табя.5).
Из графика (фиг.За и д) видно, что onge- деленные значения погрешности Аод являются действительными значениями погрешности ВТ 2, при этом значения погрешности определены относительно нулевого положения ВТ 2. По известным значениям ATzk методом, например, численного гармонического анализа, определяют амплитуду и фазу погрешности ВТ.
Таким образом, поворот роторов ВТ и 50
ДП и статора ДП на угол - i , проведение
дополнительных серий, и вычисление по указанной формуле погрешности AO&I в
0
5
0
0
каждой серии позволяет найти полную погрешность ВТ.
С помощью предлагаемого способа в отличие от известных можно определить погрешность ВТ 2 практически с любой дискретностью при наличии ДП даже с большим шагом, В качестве ДП может быть использована многогранная призма, установленная на ротор ВТ. Способ можно использовать при исследовании прецизионных датчиков угла, при паспортизации их погрешности с целью введения поправки.
Способ может быть использован в автоматизированном режиме.
Формула изобретения
Способ контроля многополюсного вращающегося трансформатора, в соответствии с которым сравнивают выходные сигналы электромеханического датчика положения испытуемого вращающегося трансформатора при фиксированных угловых положениях их роторов в пределах от 0-360°, о т л t« чающийся тем, что, с целью упрощения способа, подают питание 5 на обмотки возбуждения датчика положения и вращающегося трансформатора, устанавливают датчик положения и вращающийся трансформатор в нулевые положения, поворачивают роторы датчика 0 положения и аращающегося трансформатора на углы os r/n, где ,1(п-1), т-полюсное деление датчика положения в электрических градусах, л-число контролируемых положений в пределах г, а статор датчика положения поворачивают до положения, при котором на микровольтметре, подключенном к его выходным обмоткам, установится нулевой отсчет и, начиная от каждого из исходных углов сц производят серию отсчетов погрешности путем поворота ротороз до угла 360° + ak- r через г электрических градусов, гдеЬ-число полюсов датчика положения, равное числу поворотов в серии отсчетов, определяют погрешность, приведенную к нулевому положению датчика, с помощью математического выражения ... j/
A«ki Дои -2, Aoki/n, где A«ki - по5
0
S
1
грешность при понижении ротора после к- го поворота в 1-й серии, а по значениям расчетным путем определить амплитуду и фпэу погрешности вращающегося трансформатора.
Таблица 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения погрешности вращающегося трансформатора | 1989 |
|
SU1669056A1 |
| Способ контроля погрешностей круговых шкал | 1979 |
|
SU868337A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Устройство для передачи угловых перемещений | 1978 |
|
SU723643A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| Поворотное устройство | 1985 |
|
SU1254442A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для определения погрешности многополюсных вращающихся трансформаторов (ВТ). Целью изобретения является упоощение способа контроля. В соответствии с данным способом сравнивают выходные сигналы датчика положения (ДП) и ВТ при совместном вращении их роторов на угол 0-360°. Роторы ДП и ВТ и статор ДП поворачивают на углы а - {tin) i, где т -полюсное деление ДП; п - число контролируемых положений в пределах; ,1, 2,...(п-1)- номер поворота роторов и статора ДП, и производят n-серий отсчетов Aoki погрешности ВТ на углах от сц до 360°+ О| - т, где К - число полюсов ДП. Определяют погрешность каждого контролируемого положения ВТ по к формуле До)с1 Aoki - (У ) и по известным значениям Дом вычисляют амплитуду и фазу погрешности ВТ. 2 ил , 5 т,абл.
% ..
jjU.
-0,5;
Таблица 2
Таблица 3
Таблица 4
0.66.
Таблица 5
Продолжение табл. 5
Фиг 2.
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
