Известные способы определения механической постоянной времени электродвигателей по осциллограмме оборотов, снятых с помощью тахогенератора, требуют много времени и оборудования.
Предлол ;ен способ, по которому механическую постоянную времени определяют по напряжению биений при выбеге путем осциллографирования возникающего напряжения биений от встречного соединения трансформаторов напряжения, подключенных к выводам отключаемого двигателя, и источника питания.
Основная особенность способа заключается в том, что по полученным осциллограммам определяют время одного, двух и так далее оборотов вектора напряжения биений, и, принимая изменение скорости двигателя в первое время выбега линейным, вычисляют механическую постоянную времени двигателя.
Преимуществом способа является простота эксперимента и последующего подсчета.
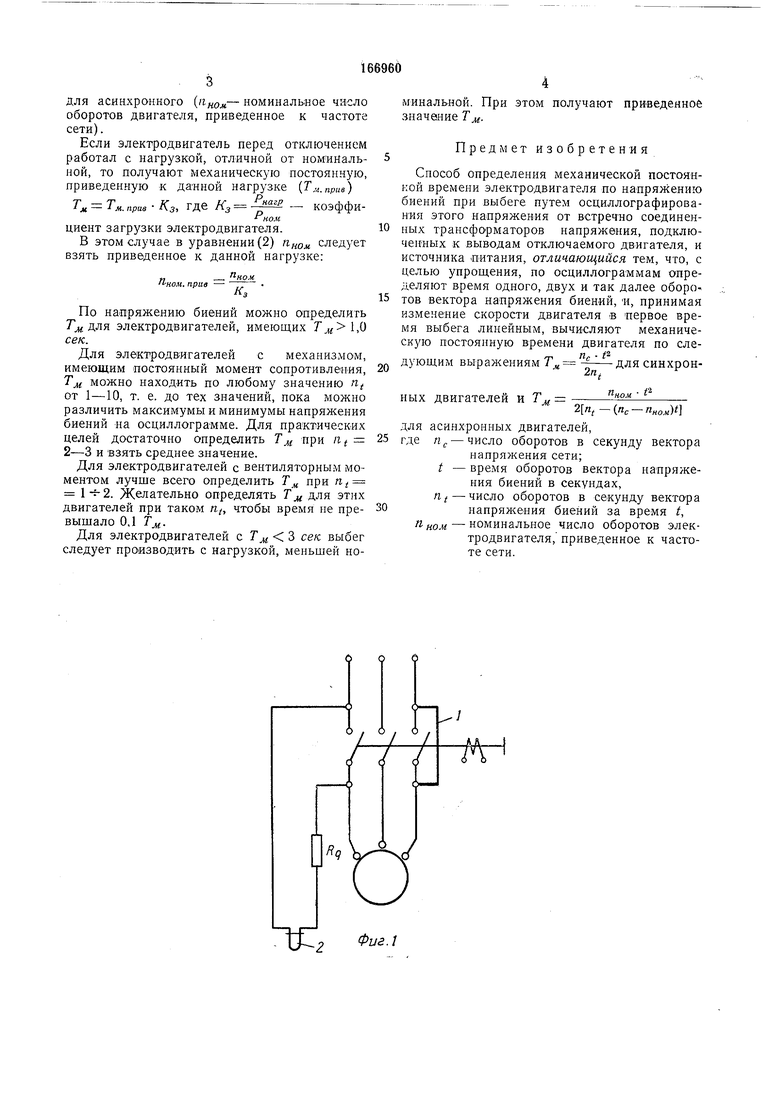
На фиг. 1 приведена принципиальная электрическая схема для осциллографирования напряжения биений, на фиг. 2-осциллограмма напряжения биений.
На одной из фаз отключающего аппарата электродвигателя устанавливают перемычку /, для высоковольтных электродвигателей перемычку устанавливают на вторичной стороне трансформаторов напряжения.
К одной из двух других фаз подсоединяют через добавочное сопряжение R шлейф осциллографа 2. Затем производят осциллографирование напряжения при выбеге и расшифровывают осциллограмму - определяют время t (сек.) одного, двух и так далее оборотов вектора напряжения биений. Время полного цикла изменения напряжения биений зависит от инерции вращающихся масс. Поскольку механическая постоянная времени электродвигателя (Г,) также зависит от Инерции вращающихся масс, то, следовательно, зная время t, в течение которого вектор напряжения биений сделает один, два и т. д. оборотов, можно определить Тj.
Например, если двигатель, работающий с номинальной нагрузкой, отклютается от сети и за время t вектор напряжения биений сделает П( полных оборотов, то Tjt, определяют по выражениям
(1) - Ziif
„, (rtf, - число оборотов в секунду вектора напряжения сети) - для синхронного двигателя и для асинхронного (г,,- номинальное число оборотов двигателя, приведенное к частоте сети). Если электродвигатель перед отключением работал с нагрузкой, отличной от номинальной, то получают механическую постоянную, приведенную к данной нагрузке (T.npue} Т Т„. прие Кз, где Яз - - коэффициент загрузки электродвигателя. В этом случае в уравнении (2) следует взять приведенное к данной пагрузке: По наоряжению биений можно определить Tjf для электродвигателей, имеющих Тм ., сек. Для электродвигателей с механизмом, имеющим постоянный момеит сопротивления, Т можно находить по любому значению п от 1-10, т. е. до тех значений, пока можно различить максимумы и минимумы напряжения биений на осциллограмме. Для практических целей достаточно определить Т при /г 2-3 и ВЗЯТЬ среднее значение. Для электродвигателей с вентиляторным моментом лучше всего определить Г, при п 1-J-2. Желательно определять Т для этих двигателей при таком п, чтобы время не превышало 0,1 TM. Для электродвигателей с Т 3 сек выбег следует производить с нагрузкой, меньшей номинальной. При этом получают приведенное значение Г. Предмет изобретения Способ определения механической постоянной времени электродвигателя по напряжению биений при выбеге путем осциллографирования этого напряжения от встречно соединенных трансформаторов напряжения, подключенных к выводам отключаемого двигателя, и источника литания, отличающийся тем, что, с целью упрощения, по осциллограммам определяют время одного, двух и так далее оборотов вектора напряжения биений, и, принимая изменение скорости двигателя в первое время выбега линейным, вычисляют механическую постоянную времени двигателя по сле„Пс t дующим выражениям Г для синхронных двигателей и Т., - (Пс - для асинхронных двигателей, где п - число оборотов в секунду вектора напряжения сети; / - время оборотов вектора напряжения биений в секундах, nt - число оборотов в секунду вектора напрял ения биений за время t, ном - номинальное число оборотов электродвигателя, приведенное к частоте сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения механической постоянной времени синхронного электродвигателя | 1983 |
|
SU1114995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| Устройство для автоматического включения резервного питания потребителя | 1985 |
|
SU1359854A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ТРЕХФАЗНОЙ ВЫСОКОВОЛЬТНОЙ ОБМОТКИ СИЛОВОГО ТРАНСФОРМАТОРА | 2008 |
|
RU2377586C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
| Способ и устройство для определения угла положения ротора электрических машин относительно вектора напряжения сети | 1934 |
|
SU43969A1 |
| СПОСОБ ОЦЕНКИ В СИЛОВЫХ ТРЕХФАЗНЫХ ТРАНСФОРМАТОРАХ ПАРАМЕТРОВ ПРОЦЕССА ПЕРЕКЛЮЧЕНИЯ КОНТАКТОВ КОНТАКТОРА БЫСТРОДЕЙСТВУЮЩЕГО РЕГУЛЯТОРА ПОД НАГРУЗКОЙ БЕЗ ЕГО ВСКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2290653C2 |
| Способ измерения тока короткого замыкания в электрических сетях | 1972 |
|
SU442429A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| Способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя | 1983 |
|
SU1121633A1 |

ЛК ФигЛ
00
