Изобретение относится к электротехнике и может быть использовано для управления трехфазными асинхронными электродвигателями при питании их от однофазной сети.
Целью изобретения является повышение эффективности торможения,
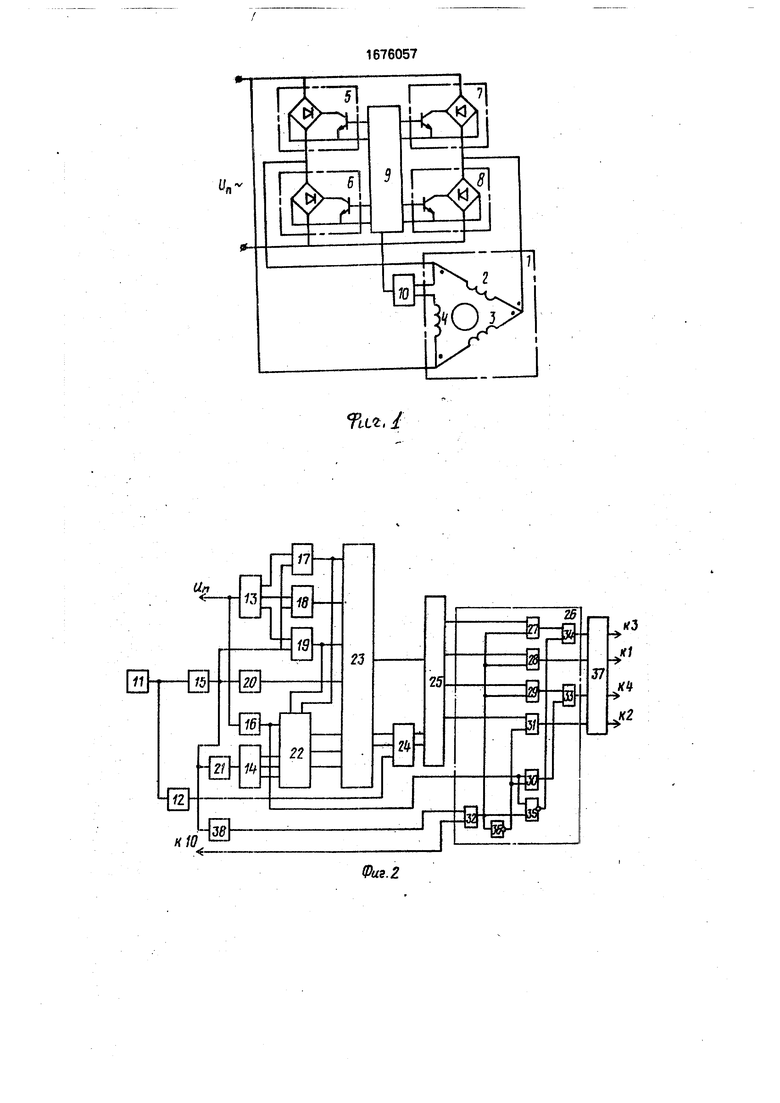
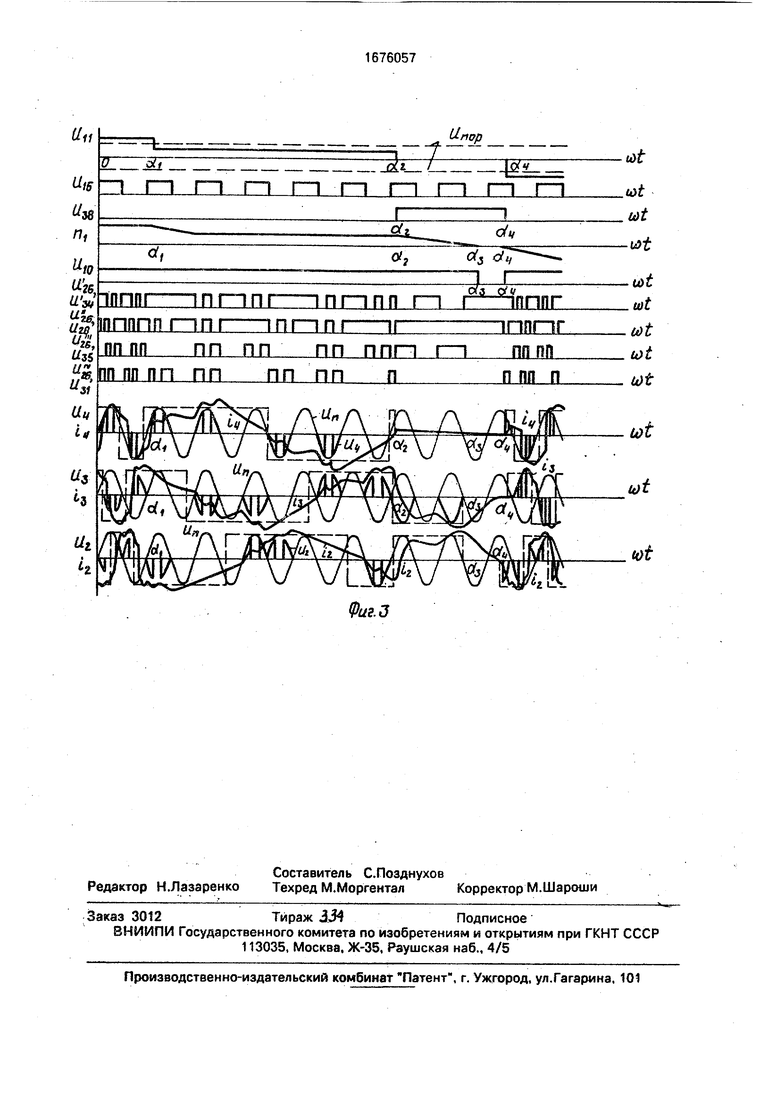
На фиг. 1 приведена структурная схема силовой части электропривода; на фиг. 2 - схема системы управления; на фиг. 3 - временные диаграммы, поясняющие работу устройства.
Электропривод переменного тока содержит трехфазный асинхронный электродвигатель (АТД) 1 состаторными обмотками 2-4, мостовой полупроводниковый коммутатор, выполненный на четырех транзисторных ключах 5-8 переменного тока, систему 9 управления и датчик 10 вращения ротора. Одна диагональ мостового коммутатора соединена с зажимами для подключения однофазного источника питания, а к другой
диагонали коммутатора подключены первые выводы первой 2 и второй 3 статорных обмоток электродвигателя 1, первый вывод третьей статорной обмотки 4 которого соединен с одним из зажимов для подключения однофазного источника питания. Вторые выводы первой 2 и второй 3 обмоток статора соединены с первыми выводами соответственно второй 3 и третьей 4 обмоток. Входы датчика 10 вращения ротора соединены соответственно с вторым выводом третьей обмотки 4 и первым выводом первой обмотки 2 электродвигателя 1. Выход датчика 10 вращения ротора соединен с входом системы 9 управления, выходы которой подключены к управляющим цепям транзисторных ключей 5-8 мостового коммутатора.
Система 9 управления ,(фиг.2) состоит из задатчика 11 входного сигнала, индикатора 12 полярности входного сигнала, двух блоков 13 и 14 фазового сдвига, блока 15
С5
fe
О
VI
Os
о ел
VI
формирования абсолютного значения входного сигнала, индикатора 16 полярности напряжения питания, трех блоков 17 и 19 сравнения, компаратора 20 входного сигнала, преобразователя 21 напряжение-частота, блока 22 частотного управления, блока 23 переключения режимов работы, блока 24 распределения импульсов управления, блока 25 управления и защиты, блока 26 управления торможением. Блок 26 управления торможением содержит четыре двухвходовых элемента ИЛИ 27-30, четыре двухвходовыхдлемента И 31-34, один двухвходовый элемент И-НЕ 35 и один инвертор 36. Первые входы трех элементов ИЛИ 27-29 и элемента И 31 образуют первые четыре входа бпока 26 управления торможением, первый вход элемента ИЛИ 30 образует пятый вход блока 26 управления торможением, а два входа элемента И 32 образуют шестой и седьмой входы блока 26. Выход элемента И 32 подключен к объединенным вторым входам элементов 27- 35 непосредственно, а через инвертор 36 - к обьединеным вторым входам элементов 30 и 31. Выходы элементов 27 и 35 подключены к входам элемента И 34, выход которого является первым выходом блока 26 управления торможением. Выходы элементов 29 и 30 подключены к входам элемента И 33, выход которого образует третий выход блока 26 управления торможением. Выходы элементов ИЛИ 28 и И 31 образуют соответственно второй и четвертый выходы блока 26 управления торможением. В систему 9 управления входят также б лок 37 гальванической развязки и усиления импульсов управления и индикатор 38 входного сигнала. Входы индикатора 12 полярности входного сигнала и блока 15 формирования абсолютного значения входного сигнала объединены и подключены к задатчику 11 входного сигнала. Выход индикатора 12 полярности входного сигнала подключен к первому входу блока 24 распределения импульсов управления. Выход блока 15 формирования абсолютного значения входного сигнала подключен к первым входам трех блоков 17-19 сравнения, вторые входы которых соединены с выходами блока 13 фазового сдвига, вход которого соединен с входом индикатора 16 полярности напряжения питания и служит для подключения к источнику переменного напряжения. Выход индикатора 16 полярности напряжения питания подключен к первому входу блока 22 частотного управления. Входы трех блоков 17-19 сравнения подключены к первым трем входам блока 23 переключения режимов работы. Выходы
блоков 17 и 19 сравнения подключены также к пятому и шестому входам блока 22 частотного управления. Входы компаратора входного сигнала 20, преобразователя 21
напряжение-частота и индикатора 38 входного сигнала объединены и подключены к выходу блока 15 формирования абсолютного значения входного сигнала. Выход компаратора 20 входного сигнала подключей к четвертому входу блока 23 переключения режимов работы. Выход преобразователя 21 напряжение-частота подключен к входу блока 14 фазового сдвига, три выхода которого подключены
к второму, третьему и четвертому входам блока 22 частотного регулирования, три выхода которого соединены с пятым, шестым и седьмым входами блока 23 переключения режимов работы, первый выход которого
подключен к третьему входу блока 25 управления и защиты. Второй и третий выходы блока 23 переключения режимов работы соединены с третьим и вторым входами блока 24 распределения импульсов управления,
выходы которого подключены к первому и второму входам блока 25 управления и защиты, четыре выхода которого соединены с первыми четырьмя входами блока 26 управления торможением, пятый и
шестой входы которого соединены соответственно с выходами индикатора 16 полярности напряжения питания и индикатора 38 входного сигнала, а седьмой вход блока 26 управления торможением образует вход системы 9 управления. Четыре выхода блока 26 управления торможением подключены к входам блока 37 гальванической развязки и усиления импульсов управления, выходы которого образуют выходы
системы 9 управления.
Электропривод переменного тока работает следующим образом.
При наличии сигнала задания UmO (интервалы 0 ок ац и ОА ои
на фиг.З) на выходе индикатора 38 входного сигнала будет присутствовать сигнал логического О, который поступает на шестой вход блока 26 управления торможением. При этом на выходах элемента 32
будет сигнал О, на выходах элементов 35,36 и 30 будет сигнал логической 1,а сигналы на выходах элементов 27-30, 33 и 34 будут идентичны сигналам на их первых входах. Таким образом, на выходах блока
26 управления торможением будут присутствовать сигналы, идентичные сигналам на первых четырех входах блока 26 соответственно, независимо ст уровня сигналов на пятом и седьмом входах блока 26,
U26, U26 , U26 , U26 . При наличии входного сигнала положительной полярности, превышающего пороговое напряжение блока 20 (интервал 0 tot CM на выходе блока 12 формируется сигнал Г, а на выходе блока 20 - сигнал О, При этом канал регулирования частоты закрыт логическими ключами блока 23 переключения режимов работы, а канал параметрического регулирования открыт. В этом случае на первый вход блока 24 распределения импульсов управления постоянно поступает сигнал 1. На выходах блоков 17-19 формируются три прямоугольных напряжения, имеющих одинаковый коэффициент заполнения и смещенных по фазе в соответствии с опорным напряжением, вырабатываемым блоком 13, соответственно на -тг/6, -п 12 и JT /6 относительно напряжения питания, 8 результате работы блока 23 указанные напряжения появляются на его трех выходах. При наличии сигнала 1 на первом входе блока 24 на его ПРПВПМ и втооом выходе будут напряжения, аналогичные напряжениям на втором и третьем выходах блока 2% соответственно. В блоке 25 формируются четыре логических сигнала управления ключами переменного тока, которые поступают через блок 26 управления торможением и блок 37 гальванической развязки и усиления импульсов управления на управляющие входы соответствующих ключей 7, 5, 8 и 6 (U26 ,и2б, U26IM, U2elv). Работа ключей в соответствии с полученными импульсами управления обеспечивает формирование трехфазной системы выходных напряжений, значения которых регулируются путем широтно-импульс- ноймодуляции однофазного напряжения питания.
При изменении полярности входного сигнала (интервал на фиг.З) на выходе индикатора 12 полярности входного сигнала формируется сигнал О, который, поступая на первый вход блока 24, обеспечивает переключение каналов прохождения импульсов управления ключами полупроводникового коммутатора таким образом, что импульсы, которые поступали на вход ключей 7 и 6, будут поступать на вход ключей 5 и 8 и наоборот. Это, в свою очередь, изменит порядок следования фаз выходного напряжения.
При уменьшении входного сигнала положительной полярности до значения меньшего порога блока 20 (интервал «1 u)t О2 на фиг. 3) на выходах блоков 12 и 20 формируется сигнал 1. В этом случае канал параметрического регулирования заперт, а канал частотного регулирования открыт. (На выходе преобразователя 21 напряжение-частота будет сигнал, частота которого пропорциональна
абсолютному значению входного сигнала. На выходе блока фазового сдвига 14 образуются три прямоугольных напряжения, смещенных по фазе друг относительно друга на угол 2 л /3 которые поступают на
второй, третий и четвертый входы блока 22 частотного регулирования, на первый вход которого поступает информация о знаке напряжения сети в виде напряжения Uie. На пятый и шестой входы блока 22 поступают
прямоугольные напряжения с выходов блоков 17 и 19 с заданным коэффициентом заполнения, определяющим значения выходного напряжения преобразователя. Прямоугольные напряжения с выходов блока 22
после прохождения блоков 23 и 24 поступают в блок 25, где формируются импульсы управления ключами 5-8, проходя через блоки 26 и 37. В результате работы ключей 5-8 в обмотках 2-4 АТД 1 формируется
трехфазная система регулируемых по частоте и действующему значению напряжений (фиг.З). При изменении полярности входного сигнала в блоке 24 происходит переключение каналов прохождения импульсов управления ключами 5-8, что обеспечивает изменение порядка следования фаз выходного напряжения. Таким образом напряжения и токи в фазах обмоток 2-4 АТД 1 определяются схемой
соединения фаз - треугольник Ua, Ua, 1)4, 12. 1з, U на фиг. 3). При этом на интервалах 0(Ut aiHO4 ft t oo осуществляется параметрическое регулирование, а на интервале ori wt 05 - частотное. Поддействием напряжений 1)2. Уз. LM в двигателе 1 развивается вращающий момент и ротор вращается.
Если теперь в некоторый момент времени, например O2 сигнал задания Un
станет равным нулю, то в работе устройства произойдут следующие изменения. На выходе индикатора 38 входною сигнала устанавливается сигнал 1, который поступает на шестой вход блока 26 управления торможением. На пятый вход блока 26 поступает сигнал Uie, соответствующий полярности напряжения питания, а на седьмой вход блока 26 - сигнал Uio с датчика вращения ротора 10. Поскольку к моменту времени
со t сс.2 в обмотке 4 АТД 1 протекает ток ц, то на выходе датчика 10 будет сигнал 1. При этом на выходах элементов 32, 27, 28 и 29 будет сигнал 1, на выходе элементов 36 и 31 - сигнал О, на выходах элементов 30
и 33 присутствует сигнал, равный сигналу на пятом входе блока 26, т.е. сигнал с выхода индикатора 16 полярности напряжения питания U16, а на выходах элементов 35, 34 - сигнал, инверсный от сигнала на пятом входе блока 26, т.е. Ui6. Таким образом, на первом выходе блока 26 присутствует сигнал Die, на втором - сигнал 1, на третьем
-сигнал Uie, на четвертом - сигнал О, независимо от состояния сигналов на первых четырех входах блока 26, т.е., независимо от работы всей остальной части системы 9 управления. В результате работы блока 37 ключ 5 оказывается а замкнутом состоянии и шунтирует фазную обмотку 4 в двигателе 1, ключ 6 разомкнут, а ключи 8 и
7включаются парафазно в зависимости от знака переменного питающего напряжения Un. При этом будет обеспечено однополупе- риодное выпрямление напряжения питания, прикладываемое к обмоткам 3 и 2 АТД 1 соответственно положительной и отрицательной полярности, что обеспечит протекание в них токов одного знака в каждой из указанных обмоток. В двигателе возникает режим динамического торможения, интенсивность которого обеспечивается за счет высокого уровня выпрямленного тока.
В процессе торможения скорость вращения ротора уменьшается. При остановке ротора в некоторый момент (О t 03 сигнал на выходе датчика вращения ротора 10 Uio равен О. Этот сигнал поступает на седьмой вход блока 26 управления торможением При этом работа блока 26 аналогична рассмотренной выше в случае, когда , т.е. сигналы на выходах блока 26 равны сигналам на первых четырех входах блока соответственно независимо от уровня сигналов на пятом и шестом входах. При нулевом входном сигнале на выходах блоков 12 и 15 формируется сигнал О, на выходе блока 20
-сигнал 1. При этом канал параметрического регулирования закрыт логическими ключами в блоке 23 переключения режимов работы, а канал частотного регулирования открыт. На выходах блоков 17-19 получают три напряжения с коэффициентом заполнения, равным единице. Напряжения с выходов блоков 17 и 19 поступают на пятый и шестой входы блока 22 частотного управления. Независимо от сигналов на остальных входах данного блока на трех его выходах будут сигналы 1. Аналогичные сигналы формируются на выходах блоков 23 и 24,
8блоке 25 будут сформированы сигналы, которые, пройдя через блоки 26 и 37, обеспечивают включение ключей 5 и 7 и запирание ключей 6 и 8 после остановки ротора АТД1.
При этом фазные обмотки 2-4 АТД 1
замыкаются накоротко и отключаются от источника питания. Таким образом, при нулевом сигнале задания Un 0 и нулевой скорости вращения ротора ni 0 заканчивается процесс торможения двигателя и он
отключается от источника питания. В течение паузы «з сог ОА электроэнергия от источника питания не расходуется.
Предлагаемое устройство позволяет переводить АТД в режим эффективного динамического торможения при достижении входным сигналом нулевого значения с последующим автоматическим отключением от источника питания при полной остановке ротора. В предлагаемом устройстве сохранены все функциональные возможности и свойства, присущие известному устройству. Повышение эффективности торможения АТД достигается без изменения силовой части устройства - полупроводникового коммутатора, а следовательно, практически при тех же массогабаритных показателях.
Формула изобретения
Электропривод переменного тока, содержащий асинхронный трехфазный электродвигатель, мостовой полупроводниковый коммутатор, выполненный на четырех транзисторных ключах переменного тока, одна
диагональ мостового коммутатора соединена с зажимами для подключения к источнику однофазного напряжения питания, а к другой диагонали мостового коммутатора подключены первые выводы первой и
второй статорных обмоток асинхронного электродвигателя, первый вывод третьей статорной обмотки которого соединен с одним из зажимов для подключения к источнику однофазного напряжения питания, систему управления, включающую в себя задатчик входного сигнала, индикатор полярности входного сигнала, два блока фазового сдвига, блок формирования абсолютного значения входного сигнала,
индикатор полярности напряжения питания, три блока сравнения, компаратор входного сигнала, преобразователь напряжение-частота, блок частотного регулирования, блок переключения режимов работы,
блок распределения импульсов управления, блок управления и защиты, блок гальванической развязки и усиления импульсов управления, входы индикатора полярности входного сигнала и блока формирования абсолютного значения входного сигнала объединены и подключены к выходу задатчика входного сигнала, выход индикатора полярности входного сигнала подключен к первому входу блока распредепения им- пульсов управления, выход блока формирования абсолютного значения входного сигнала подключен к первым входам трех блоков сравнения, вторые входы которых соединены с выходами первого блока фазо- вого сдвига, вход которого соединен с входом индикатора полярности напряжения питания и служит для подключения к источнику переменного напряжения, выход индикатора полярности напряжения питания подключен к первому входу блока частотного регулирования, выходы трех блоков сравнения подключены к первым трем входам блока переключения режимов работы, входы компаратора входного сигнала и преобразователя напряжение-частота объединены и подключены к выходу блока формирования абсолютного значения входного сигнала, выход компаратора входного сигнала подключен к че гвертому входу блока переключения режимов работы, выход преобразователя напряжение-частота подключен к входу второго блока фазового сдвига, три выхода которого подключены к второму, третьему и четвертому входам блока частотного регулирования, пятый и шестой входы этого блока подключены соответственно к выходам первого и третьего блоков сравнения, три выхода блока частотного регулирования подключены к пятому, шестому и седьмому входам блока переключения режимов работы, первый выход которого подключен к третьему входу блока управления и защиты, второй и третий выходы блока переключения режимов рабо- ты соединены с третьим и вторым входами блока распределения импульсов управления, выходы которого подключены к первому и второму входам блока управления и защиты, выходы блока гальванической развязки и усиления импульсов управления подключены к управляющим входам соответствующих четырех силовых транзисторных ключей полупроводникового коммутатора, отличающийся тем, что, с целью повышения эффективности торможения, в него введен датчик вращения ротора, в систему управления введены индикатор входного сигнала и блок управления торможением с семью входами
и четырьмя выходами, соединенными с соответствующими входами блока гальванической развязки и усиления импульсов управления, четыре первых входа блока управления торможением соединены с соответствующими выходами блока управления и защиты, пятый и шестой входы блока управления торможением соединены соответственно с выходами индикатора полярности напряжения питания и индикатора входного сигнала, вход которого соединен с выходом блока Формирования абсолютного значения входного сигнала, седьмой вход блока управления торможением образует вход системы управления, входы датчика враа(ения соединены соответственно с вторым выводом третьей статорной обмотки электродвигателя и первым выводом первой статорной обмотки электродвигателя, второй вывод которой соединен с первым выводом второй статорной обмотки, второй вывод которой соединен с первым выводом третьей статорной обмотки электродвигателя, выход датчика вращения ротора соединен с входом системы управления, блок управления торможением выполнен на четырех двухвходовых элементах ИЛИ, четырех двухвходовых элементах И, одном двухвходовом элементе И-НЕ и одном инверторе, первые входы трех элементов ИЛИ и первого элемента И образуют соответственно первые четыре входа блока управления торможением, первый вход четвертого элемента ИЛИ образует пятый вход блока управления торможением, а два входа второго элемента И образуют шестой и седь мой входы указанного блока управления торможением, выход второго элемента И подключен к объединенным вторым входам первых трех элементов ИЛИ и элемента И- НЕ непосредственно и через инвертор - к объединенным вторым входам четвертого элемента ИЛИ и первого элемента И, выходы первого элемента ИЛИ и элемента И-НЕ подключены к входам третьего элемента И, выход которого первый выход блока управления торможением, выходы третьего и четвертого элементов ИЛИ подключены к входам четвертого элемента И, выход которого образует третий выход блока управления торможением, выходы второго элемента ИЛИ и первого элемента И образуют соответственно второй и четвертый выходы блока управления торможением.
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока с питанием от однофазного источника напряжения | 1984 |
|
SU1328921A1 |
| Электропривод переменного тока | 1987 |
|
SU1517108A1 |
| Устройство для управления асинхронным двухфазным двигателем | 1985 |
|
SU1300621A1 |
| Преобразователь однофазного напряжения в регулируемое трехфазное | 1987 |
|
SU1457125A1 |
| Электропривод переменного тока | 1983 |
|
SU1248023A1 |
| Устройство для управления реверсивным асинхронным двухфазным двигателем | 1983 |
|
SU1270861A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| Устройство для управления асинхронным двухфазным двигателем | 1984 |
|
SU1166256A1 |
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1784944A1 |
Изобретение относится к электротехнике и может быть использовано для управления трехфазными асинхронными электродвигателями при питании их от однофазной сети. Целью изобретения является повышение эффективности торможения. Поставленная цель достигается за счет соединения обмоток 2, 3 и 4 электродвигателя 1 по схеме треугольник, введения датчика 10 вращения ротора и блока управления торможением в систему 9 управления. Устройство обеспечивает динамическое торможение электродвигателя 1, параметрическое и частотное управление в двигательном режиме, а также отключение электродвигателя 1 в зависимости от значения сигнала задания. 3 ил.
%l, i
Un
13
18
19
15
22
Ъ
25
26
37
+
+ f J2
Г
2Ь
fff/br
и и
Hi
и
КЦ и
JHnnnnn
fej
at ut
0t
iot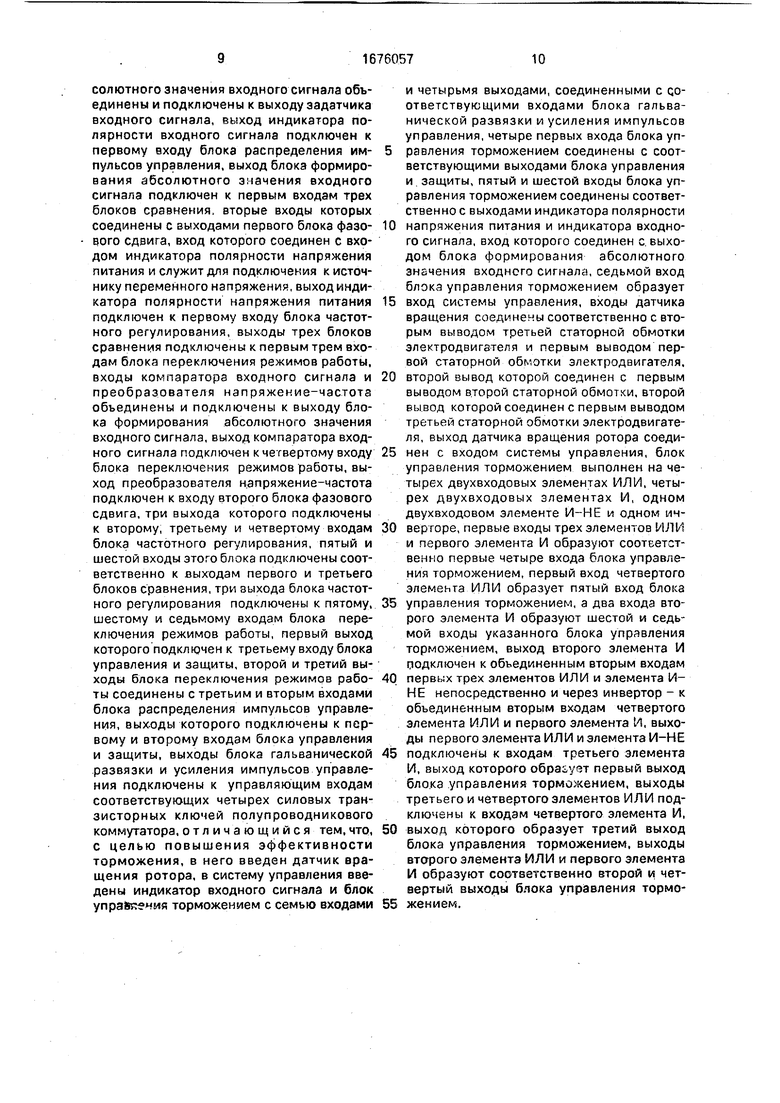
| Электропривод переменного тока с питанием от однофазного источника напряжения | 1984 |
|
SU1328921A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Преобразователь однофазного напряжения в регулируемое трехфазное | 1987 |
|
SU1457125A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
