Изобретение относится к контрольно- измерительной технике, конкретно к измерениям неэлектрических величин параметрическими датчиками.
Целью изобретения является экономия энергоресурса источника питания за счет использования энергии их измеряемого объекта, расширение функциональных возможностей.
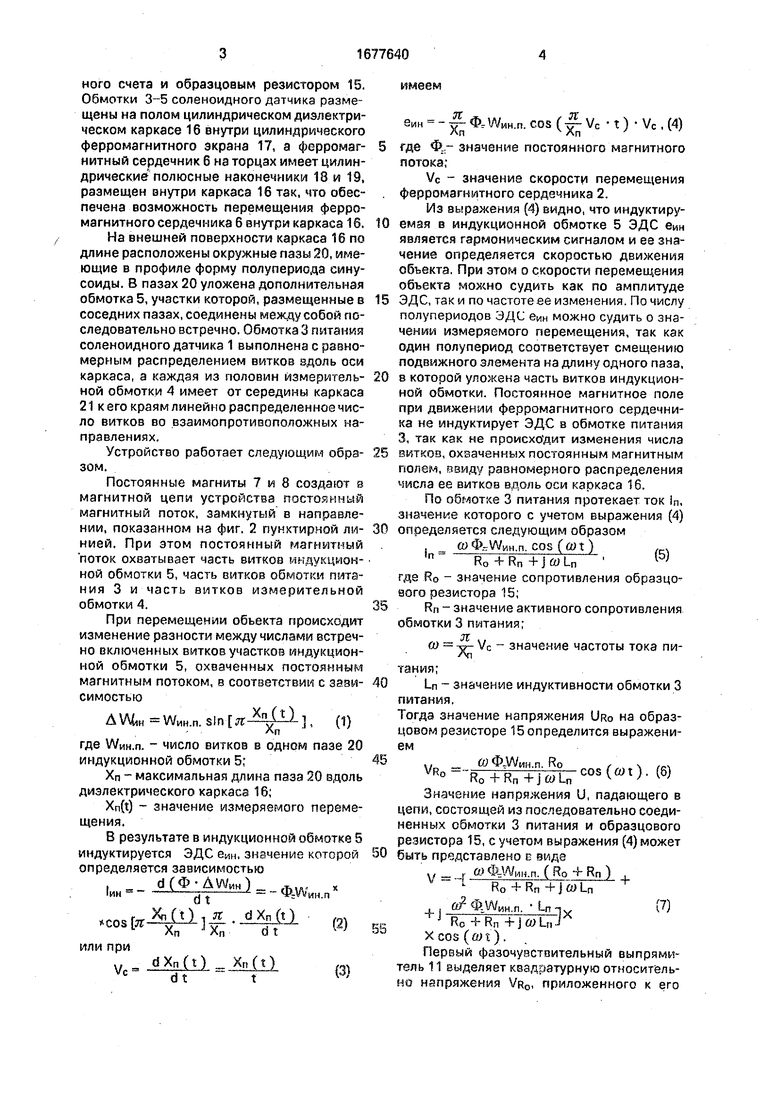
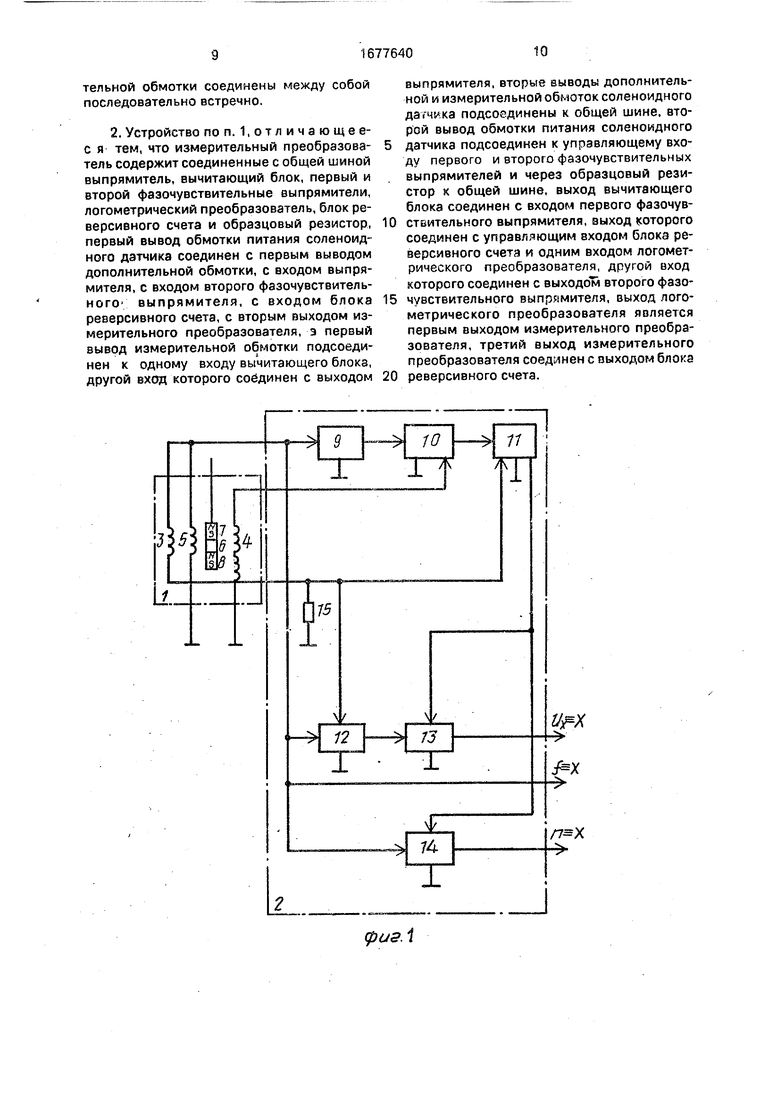
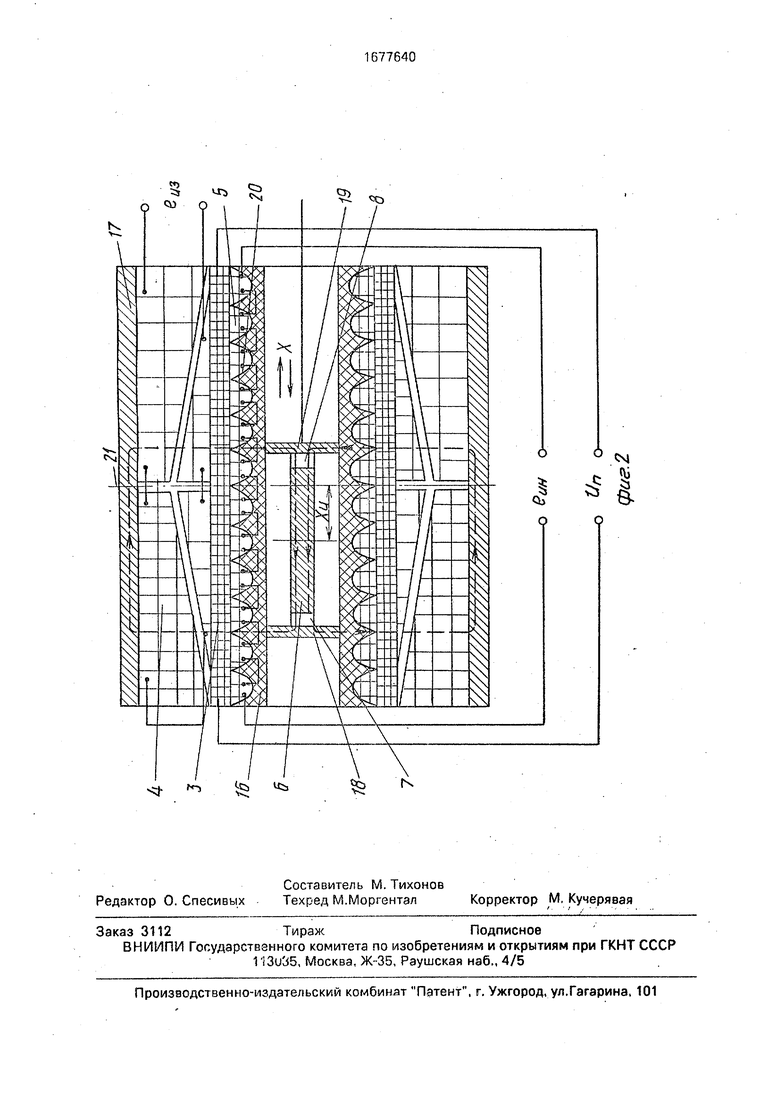
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - соленоидный датчик устройства.
Устройство для измерения быстроменяющихся неэлектрических величин содержит соленоидный датчик 1 и измерительный преобразователь 2. Соленоидный датчик 1
снабжен обмоткой 3 питания, измерительной обмоткой 4, состощей из двух соединен- ных последовательно встречно полуобмоток, дополнительной индукционной обмоткой 5 и жестко связанным с изме- ряемым объектом ферромагнитным сердечником 6, на концах которого установлены постоянные магниты 7 и 8, являющиеся источником постоянного магнитного поля, направленного вдоль оси соленоидного датчика 1.
Измерительный блок 2 устройства снабжен выпрямителем 9, вычитающим блоком 10, первым и вторым фазочувствительными выпрямителями 11 и 12, логометрическим преобразователем 13, блоком 14 реверсивDS XI
S4
к
О
ного счета и образцовым резистором 15. Обмотки 3-5 соленоидного датчика размещены на полом цилиндрическом диэлектрическом каркасе 16 внутри цилиндрического ферромагнитного экрана 17, а ферромагнитный сердечник 6 на торцах имеет цилиндрические полюсные наконечники 18 и 19, размещен внутри каркаса 16 так, что обеспечена возможность перемещения ферромагнитного сердечника 6 внутри каркаса 16.
На внешней поверхности каркаса 16 по длине расположены окружные пазы 20, имеющие в профиле форму полупериода синусоиды. В пазах 20 уложена дополнительная обмотка 5, участки которой, размещенные в соседних пазах, соединены между собой последовательно встречно. Обмотка 3 питания соленоидного датчика 1 выполнена с равномерным распределением витков здоль оси каркаса, а каждая из половин измерительной обмотки 4 имеет от середины каркаса 21 к его краям линейно распределенное число витков во взаимопротивоположных направлениях.
Устройство работает следующим образом.
Постоянные магниты 7 и 8 создают в магнитной цепи устройства постоянный магнитный поток, замкнутый в направлении, показанном на фиг. 2 пунктирной линией. При этом постоянный магнитный поток охватывает часть витков индукционной обмотки 5, часть витков обмотки питания 3 и часть витков измерительной обмотки 4.
При перемещении объекта происходит изменение разности между числами встречно включенных витков участков индукционной обмотки 5, охваченных постоянным магнитным потоком, в соответствии с зависимостью
AW,.n., (1)
Лп
где Л/ин.п. - число витков в одном пазе 20 индукционной обмотки 5;
Хп - максимальная длина паза 20 вдоль диэлектрического каркаса 16;
Xn(t) - значение измеряемого перемещения.
В результате в индукционной обмотке 5 индуктируется ЭДС еин, значение которой определяется зависимостью
.«КФ-АУУин.фм, ,
«ин.п
11
(2)
(3)
имеем
Јixu - -
0
5
0
5
0
п
Ф,Л/И
П
v - vvwH.n. COS ( vT Vc t ) Vc , (4)
Лп Лп
где Ф.- значение постоянного магнитного потока;
/с - значение скорости перемещения ферромагнитного сердечника 2.
Из выражения (4) видно, что индуктируемая в индукционной обмотке 5 ЭДС еин является гармоническим сигналом и ее значение определяется скоростью движения объекта. При этом о скорости перемещения объекта можно судить как по амплитуде ЭДС, так и по частоте ее изменения. По числу полупериодов ЭДС еин можно судить о значении измеряемого перемещения, так как один полупериод соответствует смещению подвижного элемента на длину одного паза, в которой уложена часть витков индукционной обмотки. Постоянное магнитное поле при движении ферромагнитного сердечника не индуктирует ЭДС в обмотке питания 3, так как не происходит изменения числа витков, охваченных постоянным магнитным полем, ввиду равномерного распределения числа ее витков вдоль оси каркаса 16.
По обмотке 3 питания протекает ток in, значение которого с учетом выражения (4) определяется следующим образом
в Ф-УУин.п. COS (CQt) tnRo-bRn+jftJLn
(5)
где Ro - значение сопротивления образцового резистора 15;
Rn - значение активного сопротивления обмотки 3 пмтания;
Vc - значение частоты тока ПИСУ
0
5
0
Б
тания;
- значение индуктивности обмотки 3 питания.
Тогда значение напряжения URO на образцовом резисторе 15определится выражением
(О ФгМ/ин.п. Но
VRO -j
COS ( О) t ) . (б)
Ro + Rn + J о) Ln Значение напряжения U, падающего в цепи, состоящей из последовательно соединенных обмотки 3 питания и образцового резистора 15, с учетом выражения (4) может быть представлено Е виде
О) ФДЛ/ин.п. ( RQ + Rn) ,
+ Rn + j to Ln
+ J
ИН.П.
Ln
3х
(7)
Ro + Rn + j ft Ln
x cos (on).
Первый фазочувствительный выпрямитель 11 выделяет квадратурную относительно напряжения VRO, приложенного к его
управляющему входу, составляющую на- пряжения U, приложенного к его основному входу.
Тогда с учетом выражений (6) и (7) напряжение Un на выходе фазочувствитель- ного выпрямителя 11 определится следующим образом
w v а Ф-УУин.п. U,„,,
V11 K11 Ro+Rn+JfflU {8)
где Кп - коэффициент передачи первого фазочувствительногоо выпрямителя 11.
Ток 1П, протекающий в обмотке 3 питания, создает переменный магнитный поток Ф , преобладающая часть которого замкнута по тому же пути, что и постоянный магнитный поток Ф. вследствие незначительного магнитного сопротивления этого пути. В результате витки измерительной обмотки охвачены суммарным магнитным потоком Ф,, состоящим из двух составляющих
Ф Ф. + Ф -(9)
при этом
W,m
Ф
(Ю)
W4-I Wo 1 +
.
(11)
где Wn - число витков обмотки 3 питания, охваченных преобладающей частью переменного магнитного потока;
ZM - магнитное сопротивление на пути преобладающей части переменного магнитного потока.
Число витков измерительной обмотки 4, охваченных суммарным магнитным потоком соответственно для одной W/q-i и другой W/HI ее половин описывается выражениями Xn(t) Хм
W4-n Хпх(мг)3,(12)
где W4-I и Л/4-п - число витков одной и другой половин измерительной обмотки 4, охваченных суммарным магнитным потоком;
W0 - число витков одной из половин измерительной обмотки 4, охваченных суммарным магнитным покотом Ф,, при Хи 0;
Хм - максимальное значение измеряемой величины.
С учетом последовательно встречного соединения измерительных полуобмоток суммарное число витков измерительной обмотки 4, охваченное суммарным магнитным потоком, определится следующим образом
(
Тогда ЭДС, индуктируемая в измерительной обмотке 4, при перемещении ферромаг- нитного сердечника определится выражением
-
dt
Wt W4-I - W4-H 2W0
еиз;
(14)
Или с учетом выражений (5), (9), (14) имеем
„ dJWlMML l- еиз-dt
A ЦЩУ
d t. dt
dXn(t) dt
+
i-2
W0Wn 1
ZM XM
О) Ф.-ЛУин.п. COS (ftJt)
Ro + Rn + j o U
(15)
X
dxn (t)
W0Wn
dt ZM
У 1 О ФгУУин.П. Sin ()
ЛХМ Ro + Rn-f jwU
X Xn ( t ) .
На выходе выпрямителя 9 имеем напряжение Ug, которое с учетом соотношения (2) определяется как
V9 - -К9 Ф WHH.H. d У . (16)
тогда на выходе вычитающего блока 10
имеем напряжение, которое с учетом выражений (15) и (16) определяются следующим
0
образом
Vio Vg -еиз -Кэ х л Л ... d Хп (t ) ,
X - Ф- WMH.n.J +
1 d Xn (t )
dt
AT
+ 2 W0 Ф.
5
0
-2
W0Wn
ZM
XM
й;фJWин.n. cos (tut) Ro+Rn+jo Ln
dXn(t)W0Wn y
A -Г / Л
dtZM
у 1О .п. Sin (QJt)
ХмR0+Rn+ja;Ln
XXn(t)
(17)
0
или, выполнив соотношение (-2)-0.
(18)
5v Xn XM
что может быть достигнуто, например, подбором при настройке устройства коэффициента передачи выпрямителя 9, имеем W0Wn 1
Vw rZM Хм
v юФлДЛ/ин.п. COS (Wl )
Ro + Rn + j ш Ln W0Wn
xdX;t(0+2
ZM
X
X
X
(19)
v J а ФсМин.п. sin () AXM R0+Rn+ju Ln
XXn(t).
Первый фазочувствительный выпрямитель 11 выделяет квадратурную относительно напряжения VRO, приложенного к его управляющему входу, составляющую напряжения Uio, приложенного к его основному входу. Тогда с учетом выражений (6) и (19) напряжение Un на выходе фазочувстви- тельного выпрямителя 11 определится следующим образом
W0Wn 1
X
ZM
.п.
ХмХ Xn(t)
(20)
Ro + Rn + joLn где Кц - коэффициент передачи фазочувст- вительного выпрямителя 11.
Напряжение на выходе логометриче- ского преобразователя 13 с учетом выражений (8) и (20) определится как
Ki2Kii v
V13
Kl2
X
Wo Wn
Xn(t)
(21)
Zn Ln XM
где KIS - коэффициент передачи логометри- ческого преобразователя 13.
Тогда, приняв во внимание соотношение
Ln
Wn
ZM
(22)
с учетом выражения (21), имеем Vx Via 2
Ki3 Кц L W0 . Y ,, ,„„,
KiW Xn(t) (23)
Отсюда следует, что напряжение на выходе логометрического преобразователя 6 пропорционально значению измеряемой неэлектрической величины, в частности перемещению Xn(t) объекта.
Напряжение с выхода первого фазочу- ствительного выпрямителя 11 подается на управляющий вход и блока 14 реверсивного счета, который, если знак напряжения Un положительный, суммирует число периодов п ЭДС вин, подключенной к его основному входу.
Если знак напряжения Un отрицательный, то блок 14 реверсивного счета вычитает число периодов п ЭДС вин, подключенной к его основному входу.
Выходной сигнал блока 14 реверсивного счета определится соотношением
n slg (t)
Xn(t). Хп
(24)
где sign Xn(t) р, при Xn(t) О
2 0, при Xn(t) О
L-1, приХп(1)0
у (t
ent 1 + - - наибольшее
превосходящее отношение
Естественным условием нормального функционирования логических элементов, на которых может быть реализована схема цифровогоо блока 14 реверсивного счета и
электронных ключей, обычно имеющихся в схемах фазочувствительных выпрямителей 11, 12, является предварительное формирование электрических уроанёй сигналов (импульсов) управления.
Формирователи электрических уровней сигналов управления являются неотъемлемой частью указанных блоков устройства. На фиг. 1 данные формирователи сигналов управления не указаны в виде отдельных
- блоков, так как их присутствие не является принципиально необходимым, а носит вспомогательный характер, служит обеспечению надежности и точности функционирования отдельных блоков устройства.
Следует также отметить, что в качестве обмотки 2 питания в устройстве в некоторых случаях может быть использована непосредственно дополнительная обмотка 5 соленоидного датчика 1 (при достаточном
количестве витков индукционной обмотки 5, размещаемых в пазе 20).
Формула изобретения
1. Устройство для измерения быстроменяющихся неэлектрических величин, содержащее измерительный преобразователь и соленоидный датчик, снабженный обмоткой питания и измерительной обмоткой, которые размещены внутри цилиндрического
ферромагнитного экрана на полом цилиндрическом каркасе, внутри которого расположен жестко связанный с измеряемым объектом ферромагнитный сердечник, причем обмотка питания соленоидного датчика
выполнена с равномерным распределением витков вдоль оси каркаса, а измерительная обмотка состоит из двух соединенных последовательно встречно секций, имеющих линейно распределенное от середины каркаса к его краям число витков во взаимно- противоположных направлениях, отличающееся тем, что, с целью расширения функциональных возможностей и экономии энергоресурса источника питания, Сопеноидный датчик устройства снабжен дополнительной обмоткой, в торцах ферромагнитного сердечника установлены постоянные магниты с цилиндрическими полюсными наконечниками, по длине каркасз на его внешней поверхности выполнены окружные пазы, имеющие в профиле форму полупериода синусоиды, в которых уложена дополнительная обмотка, причем расположенные в соседних пазах участки дополнительной обмотки соединены между собой последовательно встречно.
2. Устройство по п. 1,отличающее- с я тем, что измерительный преобразова- тель содержит соединенные с общей шиной выпрямитель, вычитающий блок, первый и второй фазочувствительные выпрямители, логометрический преобразователь, блок реверсивного счета и образцовый резистор, первый вывод обмотки питания соленоидного датчика соединен с первым выводом дополнительной обмотки, с входом выпрямителя, с входом второго фазочувствитель- ного выпрямителя, с входом блока реверсивного счета, с вторым выходом измерительного преобразователя, э первый вывод измерительной обмотки подсоединен к одному входу вычитающего блока, другой вход которого соединен с выходом
выпрямителя, вторые выводы дополнительной и измерительной обмоток соленоидного датчика подсоединены к общей шине, второй вывод обмотки питания соленоидного датчика подсоединен к управляющему входу первого и второго фазочувствительных выпрямителей и через образцовый резистор к общей шине, выход вычитающего блока соединен с входом первого фазочув- ствительного выпрямителя, выход которого соединен с управляющим входом блока реверсивного счета и одним входом логомет- рического преобразователя, другой вход которого соединен с выходоТй второго фазо- чувствительного выпрямителя, выход лого- метрического преобразователя является первым выходом измерительного преобразователя, третий выход измерительного преобразователя соединен с выходом блока реверсивного счета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения контакта инструмента с деталью | 1981 |
|
SU971618A1 |
| Трансформатор постоянного тока | 1978 |
|
SU691936A1 |
| Преобразователь электрическогоСигНАлА B углОВОЕ пЕРЕМЕщЕНиЕ | 1979 |
|
SU842902A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДИФФЕРЕНЦИАЛЬНОЙ ТОКОВОЙ ЗАЩИТЫ ШИН | 2009 |
|
RU2396661C1 |
| Зонд для измерения магнитной восприимчивости и удельной электропроводности (его варианты) | 1984 |
|
SU1231448A1 |
| Бесконтактный потенциометр | 1984 |
|
SU1206721A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1995 |
|
RU2082151C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2505822C1 |
| Устройство для измерения усилий | 1983 |
|
SU1118875A1 |
Изобретение относится к контрольно- измерительной технике и предназначено для измерения быстроменяющихся неэлектрических величин. Цель изобретения - расширение функциональных возможностей и экономия энергоресурса источника питания за счет использования энергии перемещаемого объекта измерения. При перемещении ферромагнитного сердечника с расположенными на нем постоянными магнитами на дополнительной обмотке, являющейся составной частью генераторной части датчика-, индуктируется ЭДС, которая прикла- дывается к обмотке питания параметрической части датчика. На выходе датчика формируется аналоговый сигнал, пропорциональный скорости перемещения ферромагнитного сердечника. Измерительный преобразователь осуществляет обработку сигналов датчика и формирование на выходах устройства сигналов, пропорциональных перемещению и скорости измеряемого объекта. 1 з.п.ф-лы, 2 ил.
физЛ
| Гончаров И | |||
| Особенности расчета функций преобразователя взаимоиндуктивных преобразователей датчиков соленоидного типа | |||
| Датчики систем измерения контроля и управления | |||
| Межвузовский сб | |||
| науч | |||
| тр | |||
| Пенза, Пензенский политехи, ин-т, 1985, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
