Изобретение относится к электронной технике и предназначено для определения пространственного положения вторичного облучателя радиотелескопа, работающего в автоматическом режиме позиционирования. Оно может быть использовано в системе измерения, контроля и ввода графической информации в вычислительное устройство.
Известно устройство для определения координат, содержащее планшет, электроакустический преобразователь, генератор циклов измерения и циклов коррекции, канал преобразования, блок сравнения, циф- роаналоговый преобразователь, элементы и эталонный канал, предназначенный для компенсации погрешностей измерения.
Недостатком данного устройства является низкое быстродействие и сложность конструкции.
Известно устройство для бесконтактного измерения расстояния, содержащее электроакустический преобразователь, генератор, блок формирования импульсов, усилитель, триггер, счетчик, элемент Н, индикатор. Принцип его работы заключается в следующем: излучается определенное количество ультразвуковых импульсов с определенным коэффициентом заполнения. При этом отраженные от препятствия ультразвуковые импульсы считываются. Расстоянием определяется известным методом в зависимости от времени пробега;
Недостатком данного устройства является низкая точность, обусловленная нестабильностью измерения при колебаниях внешних параметров.
Наиболее близким по технической сущности и достигаемому результату является устройство для определения координат, которое содержит планшет-звукопровод, пьезоэлектрические преобразователи, счетчик координат, формирователи строб-импульсов, триггер, элемент И, генератор импульсов, делитель частоты и усилитель. В данном устройстве координата определяется измерением времени пробега акустической вол- ны от излучателя до приемника. Компенсация температурной погрешности, вызванной изменением скорости распространения волны в планшете осуществляется изменением частоты акустической волны.
Недостатком данного устройства является низкая точность, т.к. во-первых, изменение амплитуды сигнала на выходе приемника, вызванное изменением внешних параметров в конечном итоге сказывается на точности определения координат, поскольку порог срабатывания компаратора остается неизменным, во-вторых, изменение частоты сигнала изменяет время задержки при фиксировании прихода акустической волны, что вызывает дополнительную погрешность.
Целью изобретения является повышение точности и разрешающей способности определения координат.
Поставленная цель достигается тем, что в отличии от прототипа в данном устройстве
получение хода, соответствующего времени прохождения акустической волны от излучателя до приемника (следовательно, и координаты), осуществляется как подсчетом количества импульсов высокочастотного ге5 нератора, так и измерением фазового сдвига между сигналами, поступающих от генератора гармонического колебания и пьезоэлектрического приемника. Так как измерения амплитуды сигналов не вызывают
0 изменения фазы, то погрешность, вызванная девиацией амплитуды в данном устройстве исключается и, следовательно,- повышается точность определения положения облучателя.
5 Для компенсации температурной- погрешности, вызывающейся изменением скорости распространения акустической волны (при изменении температуры окружающей среды), устройство содержит два пье0 зоэлектрических приемника, расположенных на противоположных сторонах звуко. провода (рельса). В каждом цикле измерения осуществляется коррекция полученного результата, учитывающего температурные
5 давиации (например, увеличение длины рельса) и сравнение полученного числа с эталонным числом, соответствующим нормальным (номинальным) температурным условиям, т.е. условиям с фиксированной
0 скоростью распространения акустической волны в звукопроводе.
Целью изобретения является повышение точности и разрешающей способности определения координат.
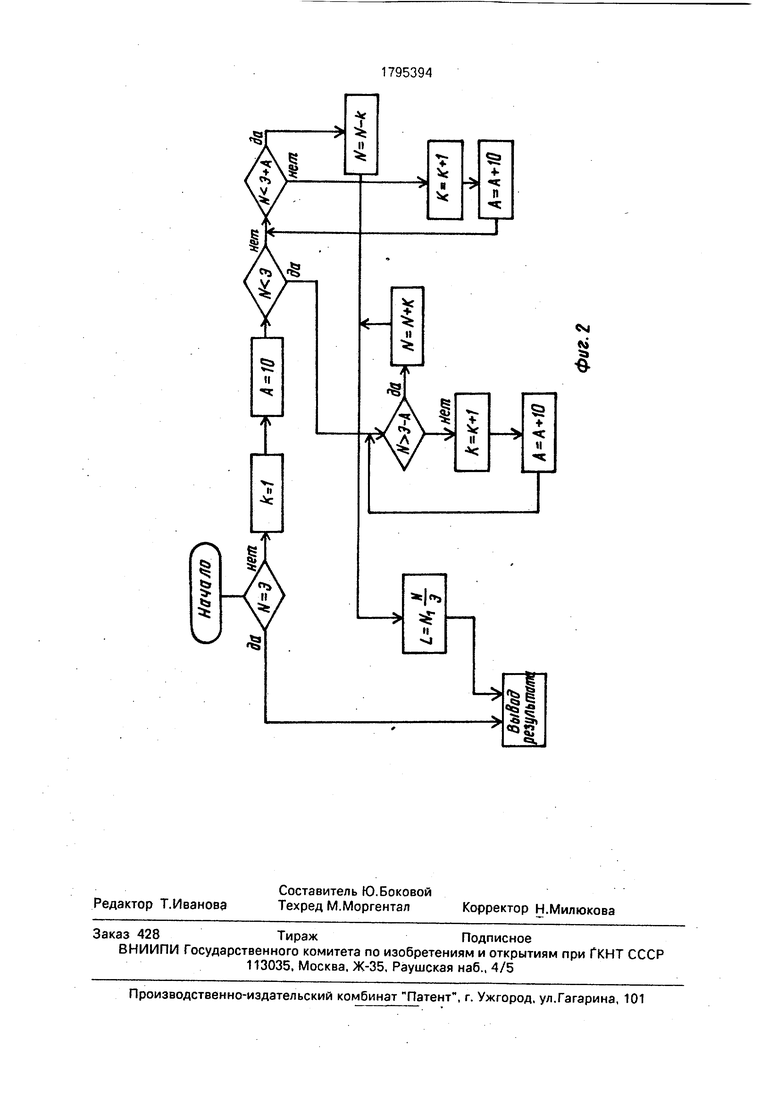
5 На фиг.1 показана функциональная блок-схема устройства; на фиг.2 - блок-схема алгоритма работы.
Устройство содержит задающий генератор 1, рельс-звукопровод 2, по которому
0 движется тележка облучателя радиотелескопа, пьезоэлектрический кольцевой излучающий преобразователь 3, механически закрепленный на колесе тележки, два неподвижных пьезоэлектрических приемных
5 преобразователя 4 и 5, зафиксированных на противоположных краях звукрпровода (рельса), два входных усилителя 6 и 7, два пороговых устройства 8 и 9, усилитель 10 мощности, управляющий генератор 11, ключ 12, формирователь 13 импульсов, два
RS-триггера 14 и 15, две логические схемы И 16 и 17, два счетчика импульсов 18 и 19, два цифровых фазовых детектора 20 и 21, цифровой сумматор 22, вычислительное устройство 23 и индикатор 24.
Устройство для определения положения облучателя радиотелескопа работает следующим образом.
Импульс с выхода управляющего генератора 11 поступает на ключ 12 и открывает его, в этот момент напряжение с задающего генератора 1 через усилитель мощности 10 прикладывается к электродам излучателя, который начинает генерировать ультразвуковые волны. Импульс с выхода генератора 11 также поступает на триггер 14,15 и переводит их в состояние логической 1, синхронно, этим же импульсом обнуляются счетчики 18 и 19.
Как только акустическая волна достигает приемного преобразователя 5 на его выходе появляется электрический сигнал, который через усилитель 6 поступает на пороговое устройство 8. При достижении этим сигналом порогового значения на выходе появляется импульс, которые триггер 14 переводит в О состояние, длительность импульса на выходе RS-триггера 14 пропорциональна расстоянию LL В течение этого импульса открывается логическая схема И 16 и импульсы с частотой возбуждающего генератора 1 через формирователь импульсов 13 поступают на счетчик 18. В результате фиксируются старшие разряды числа в счетчике 18, пропорциональные расстоянию LI. На выходе цифрового фазового детектора 20, на первый вход которого поступает сигнал от генератора 1 как опорный сигнал, а на второй вход сигнал от усилителя 6, формируется код, соответствующий младшим разрядам числа. Полученное число поступает на первый вход цифрового сумматора 22.
Аналогично формируется второе число пропорциональное расстояние L.2, оно поступает на второй вход цифрового сумматора 22. После суммирования на выходе сумматора появляется число, которое пропорционально расстоянию от приемного преобразователя 4 до приемного преобразователя 5, т.е. длине всего звукопровода (рельсового пути). Это число поступает на вход вычислительного устройства 23.
В блоке 23 число с сумматора 22 сравнивается с эталонным числом, хранящимся в одном из регистров блока 23 и соответствующим времени прохождения акустической волны всего звукопровода в нормальных условиях. В случае равенства этих чисел, число, которое поступает на первый вход сумматора, выводится на блок индикации.
При изменении температуры окружающей среды изменяется скорость распрост- ранения акустической волны, за счет изменения модуля упругости Е рельса, так как
10
V
-№ Р
0
5
0
5
0
где Е - модуль Юнга, р - плотность звукопровода (рельса).
При этом изменяется также длина рельса, и следовательно, расстояние между при- емными преобразователями 4 и 5.
В результате изменения скорости распространения волны изменяется временной интервал пропорциональный измеряемому расстоянию и появляется погрешность.
Согласно принципу работы данного устройства с изменением температуры будут изменяться числа NI, N2, их сумма N и, следовательно, нарушается равенство эталонному числу 3. В этом случае компенсации погрешности осуществляется с использованием вычислительного устройства 23.
Так как изменение числа N вызвано двумя факторами, изменением скорости распространения волны и изменением расстояния приемного преобразователя 4 до приёмного преобразователя 5, а эталонное число соответствует фиксированному расстоянию между ними, т необходимо число N скорректировать, т.е. выделить ту часть, которая вызвана изменением длины звукопровода. Корректировка числа N осуществляется по алгоритму, блок-схема которого показана на фиг.2.
После коррекции числа N искомое расстояние определяется по формуле
L Ni
N
0
где N /Э - коэффициент, учитывающий изменение скорости распространения волны, NI - число, пропорциональное расстоянию U
Полученный результат поступает на индикатор.
При изменении амплитуды первой полуволны выходного сигнала изменяется момент срабатывания формирователя строб-импульсов и появляется погрешность.
Так как в данном устройстве получение результата осуществляется как подсчетом количества импульсов высокочастотного генератора, но и также изменением фазового сдвига, который не изменяется при изменении амплитуды первой полуволны, погрешность, вызванная давиацией амплитуды практически исключена.
В результате измерения фазового сдвига, повышается также разрешающая способность работы данного устройства. Например, при возбуждении излучателя с частотой 100 кГц и измерении фазового сдвига с точностью один градус (электр.)
разрешающая способность составляет 0,1 мм. И наконец, в результате коррекции числа N соответствующего длине всего рельсового пути, т.е. учет удлинения звукопровода
(рельса) (при изменении его температуры), значительно повышает точность определе- ния координаты облучателя радиотелескопа. Например, при изменении температуры рельса на 10°С, когда расстояние между
приемниками составляет 20 м, точность повышается на 5 мм (температурный коэффициент расширения стали 11,).
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустоэлектронное устройство для определения пространственного положения облучателя радиотелескопа | 1989 |
|
SU1758615A1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2005 |
|
RU2270997C1 |
| Преобразователь перемещения в код | 1990 |
|
SU1783608A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Устройство для считывания графи-чЕСКОй иНфОРМАции | 1979 |
|
SU849252A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2025778C1 |
| Устройство для считывания графической информации | 1988 |
|
SU1552208A2 |
| Устройство для считывания графической информации | 1982 |
|
SU1059587A1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
Изобретение относится к электронной технике и предназначено для определения координат облучателя радиотелескопа. Целью изобретения является повышение точности и разрешающей способности определения координат. Устройство содержит задающий генератор 1, рельс-звукопровод 2, излучающий преобразователь 3, приемные преобразователи 4 и 5, входные усилители 6 и 7, пороговые устройства 8 и 9, усилитель 10 мощности, управляющий генератор 11, ключ 12, формирователь, 13 импульсов, триггеры 14 и 15, логические схемы И 16 и 17, счетчики 18 и 19 импульсов, цифровые детекторы 20 и 21, цифровой сумматор 22, вычислительное устройство 23, индикатор 24, Повышение точности достигается за счет компенсации температурных погрешностей, а также амплитудных и фазовых ошибок. 2 ил.
Формула йзобрете.ния Электроакустическое устройство для определения координат облучателя радиотелескопа, содержащее один излучающий пьезоэлектрический преобразователь с усилителем мощности, два приемных пьезоэ- лектрических преобразователя, которые расположены на концах рельса-звукопрово- да и подключены к входным усилителям, задающий генератор, подключенный к усилителю мощности через ключ, вход которого соединен с управляющим генератором, индикатор и две цепи из последовательно соединенных RS-триггера, логической схемы И и счетчика импульсов, причем S-входы RS-триггеров подключены к управляющему генератору, о т ли ч а ю щ ё е с я тем, что, с целью повышения точности и разрешающей способности определения координат, излучающий преобразователь выполнен в виде кольца и закреплен на колесо тележки радиотелескопа, а в устройство введены формирователь импульсов, два пороговых устройства, два цифровых фазовых детектора, цифровой сумматор и вычислительное устройство, выход которого подключен к индикатору, при этом первые два входа цифрового сумматора соединены соответственно с выходом первого цифрового счетчика и первого цифрового фазового детектора, а вторые два входа цифрового сумматора - соответственно с выходом второго цифрового счетчика и второго цифрового фазового детектора, три входа вычислительного устройства подключены соответственно к выходам первого счетчика импульсов, первого цифрового фаз.ового детектора и цифрового сумматора, вторые входы логических схем Л соединены с выходом формирователя импульсов, вход которого подключен к задающему генератору, первые входы цифровых фазовых детекторов соединены соответственно с выходами входных усилителей, которые через пороговые устройства соединены также с R-входамм соответствующих RS-триггеров, вторые входы цифровых фазовых детекторов подключены к задающему генератору.
| Горбатов А.А., РудашевскийТ.Е | |||
| Акустические методы измерения расстояний и управления | |||
| М.: Энергоиздат, 1981, с.208 | |||
| Устройство для считывания графической информации | 1984 |
|
SU1188766A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
