Изобретение относится к медицине, а именно к диагностическим устройствам и к устройствам для рефлексотерапии
Цель изобретения - повышение точности задания величины воздействия.
На фиг. 1 представлено устройство для вибрационного воздействия на ткани организма в объеме признаков первого пункта предложенной формулы изобретения; на фиг. 2 - вариант выполнения коромысла, оснащенного двумя грузами; на фиг. 3 -то же, с третьим плечом с грузом; на фиг. 4 - вариант выполнения устройства с дополнительно введенным в него частотомером; на фиг. 5 - то же, с введенными в него датчиком тока и измерителями постоянного и переменного тока; на фиг. 6 - пример выполнения измерителя постоянного тока и напряжения; на фиг. 7 - пример выполнения измерителя постоянного тока; на фиг. 8 - вариант выполнения устройства с дополнительно введенными в него
измерителем напряжения и двумя делителями с устройствами индикации выходного сигнала делителей; на фиг 9 - вариант выполнения устройства с введенными в него дополнительно n-канальным регистратором временныхпроцессов и коммутатором с измерителем напряжения и измерителями то- ков, частотомером и делителями, снабженными нормирующими преобразователями
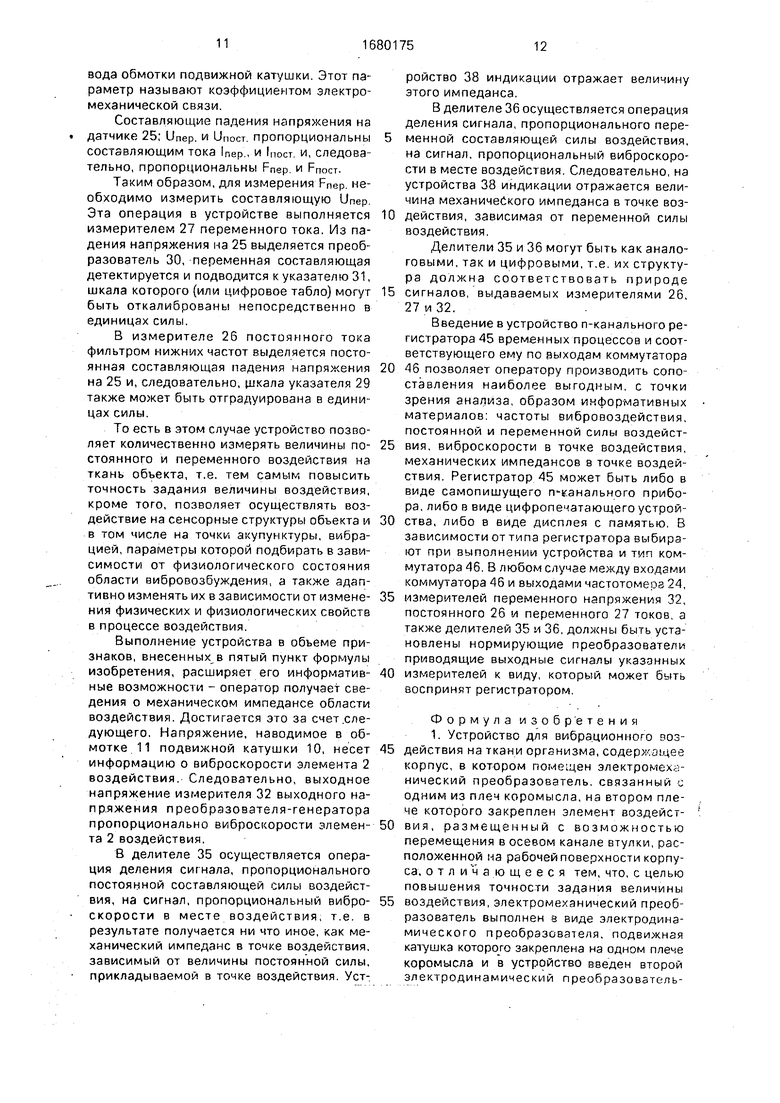
В корпусе 1 устройства размещены элемент 2 воздействия, коромысло 3 и втулка 4. Втулка 4 установлена в корпусе 1 с возможностью ее перестановки вдоль оси элемента воздействия например, на резьбе и снабжена накаткой по поверхности максимального диаметра Ось 5 коромысла установлена на опоре 6, закрепленной внутри корпуса 1 Элемент 2 воздействия закреплен на плече коромысла 3 В корпусе 1 размещены и закреплены первый электродинамический преобразователь 7 и
сл
С
а
00
о
ы-Л
NJ сл
генератор в виде второго электродинамического преобразователя 8.
Подвижная катушка 9 первого преобразователя 7 закреплена на одном плече коро- мысла. На другом плече коромысла закреплена подвижная катушка 10 второго преобразователя 8. Обмотка 11 подвижной катушки 10 присоединена к входу усилителя-ограничителя 12, выход которого присоединен к потенциометру 13. Подвижный контакт переменного резистора подключен к одному из входов усилителя 14 мощности. К другому .входу усилителя мощности подключен выход источника 15 опорного напряжения. Выход усилителя мощности присоединен к обмотке 16 подвижной катушки 9.
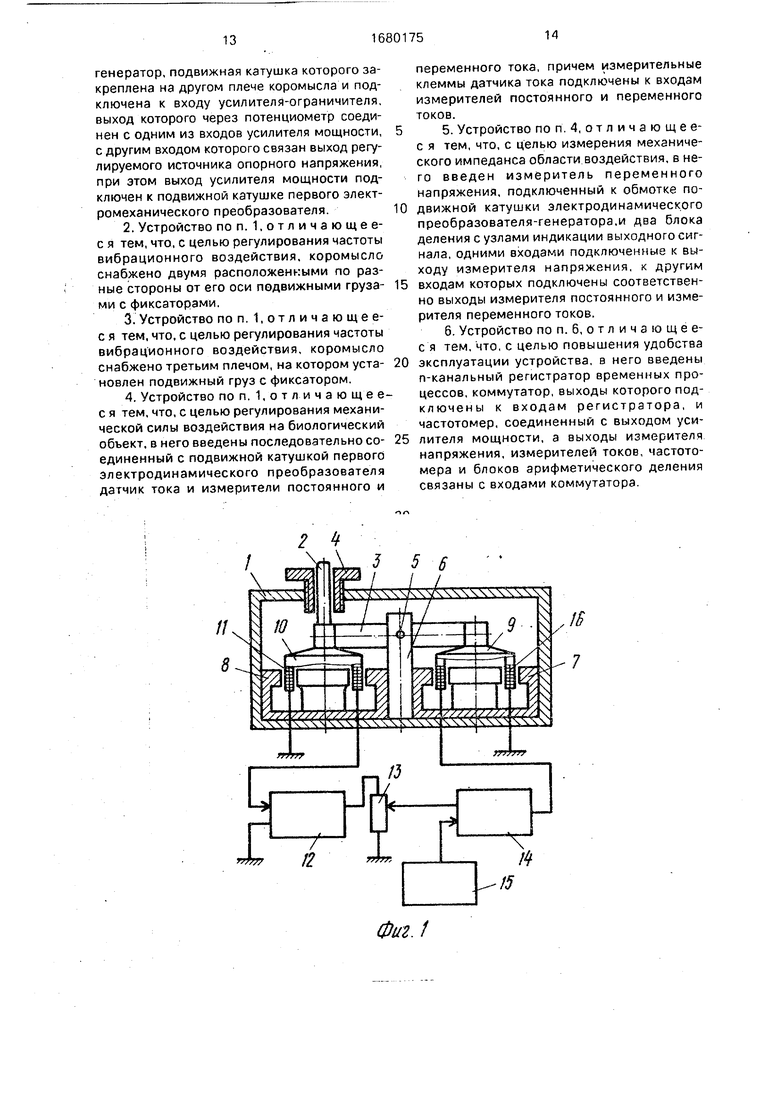
На плечах коромысла 3 могут быть установлены с возможностью их перемещения вдоль коромысла грузы 17 и 18. Перемещение грузов, установка их в нужном месте коромысла и их закрепление на нем могут быть выполнены, например, винтом 19 с правой и певой резьбой на концах, взаимодействующей с гайками, укрепленными на грузах. Вращение винта для перемещения грузов осуществляют, например, рукояткой 20.
Коромысло может быть (как вариант выполнения устройства) снабжено третьим плечом 21. На плече установлен с возможностью перемещения вдоль него и закрепления в нужном месте груз 22. Для закрепления на плече груз может быть, например, снабжен цангой 23.
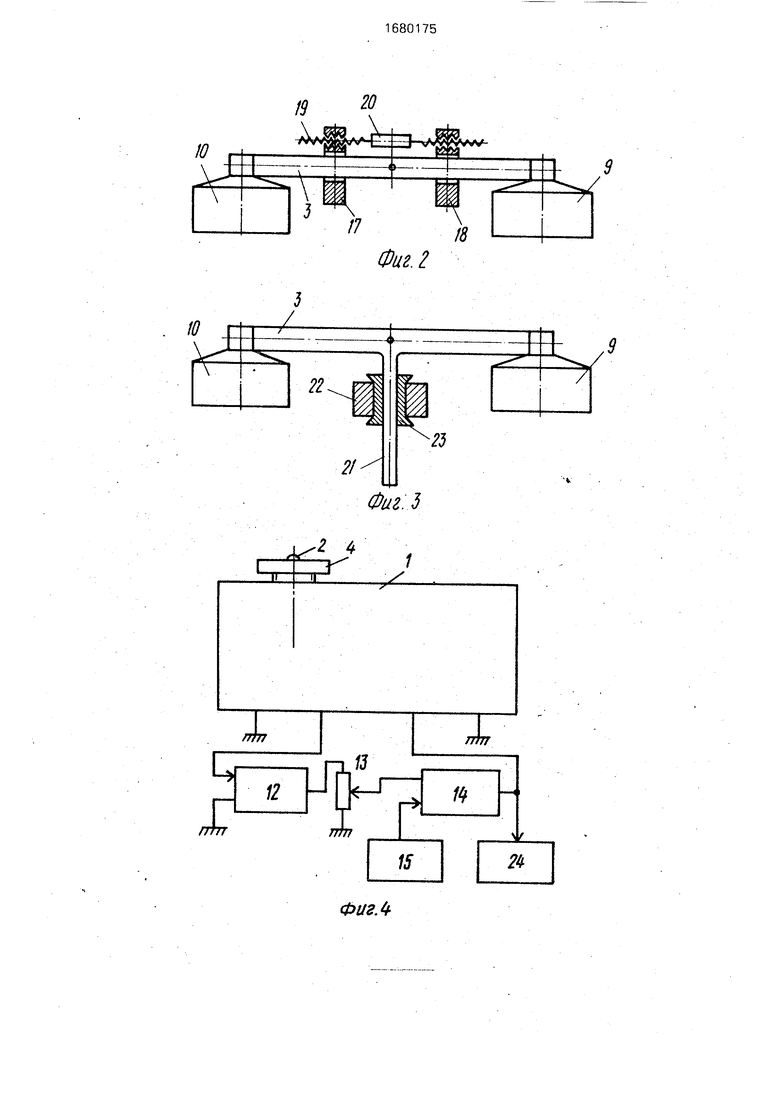
К выходу усилителя 14 мощности может быть подключен частотомер 24.
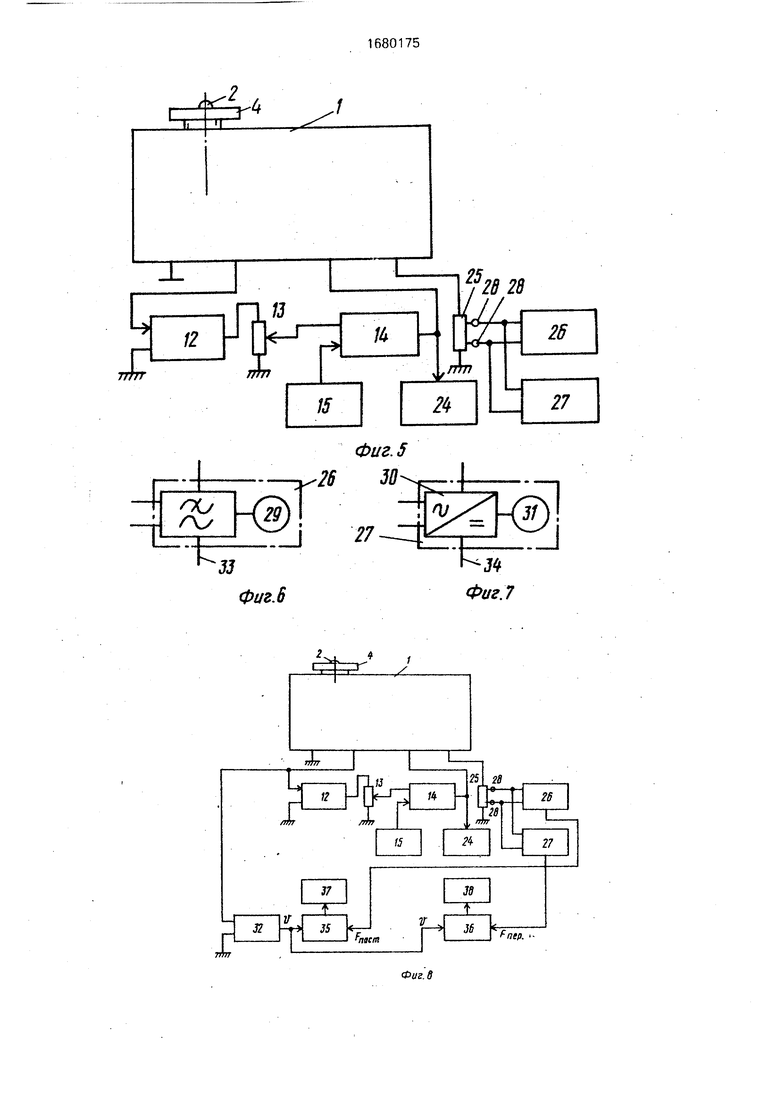
В устройство могут быть введены последовательно соединенный с обмоткой 16 подвижной катушки 9 датчик 25 тока, измеритель 26 постоянного тока и измеритель 27 переменного тока, причем измерительные клеммы 28 датчика тока присоединены к входам измерителей 26 и 27. Измеритель 26 постоянного тока может представлять собой фильтр нижних частот, к выходу которого подключен указательный прибор 29. Фильтр нижних частот может быть выполнен по широко известным схемам, а указательный прибор 29 может быть как аналоговым (стрелочным, например, магнитоэлектрического типа), так и цифровым. Измеритель 27 переменного тока может состоять из преобразователя 30 переменного тока в постоянный и указательного прибора 31. Указательный прибор 31 может быть таким же, как и прибор 29. Преобразователь 30 может быть выполнен в виде моста из диодов с фильтром нижних частот на выходе.
К обмотке (1 подвижной катушки 10 второго электродинамического преобразователя 8 может быть подключен измеритель 32 переменного напряжения. Измеритель 32
переменного напряжения по своей структуре может быть таким же, как и измеритель 27 переменного тока. К дополнительному выходу 33 фильтра нижних частот измерителя 26 постоянного тока, к дополнительному вы0 ходу 34 преобразователя 30 измерителя 27 переменного тока своими входами подключены делители 35 и 36, к другим входам которых подключен, например, выход 34 преобразователя 30 в измерителе 32 пере5 менного напряжения.
Делители 35 и 36 снабжены устройствами 37 и 38 индикации выходного сигнала делителей. Делители 35, 36 и устройства 37, 38 индикации могут быть как аналоговыми,
0 так и цифровыми и выполнены по известным схемам.
Принцип работы электродинамического преобразователя-двигателя 7 основан на взаимодействии тока, протекающего по
5 проводнику, с постоянным магнитным полем. При протекании тока через обмотку 16 подвижной катушки 9 на ее проводник действует сила . где I - ток в проводнике: В - магнитная индукция в воздушном зазо0 ре магнитной системы преобразователя; I- длина проводника обмотки 16. Если ток I - постоянный - сила F постоянна, если ток I переменный - сила F переменна, если ток I содержит (как в нашем случае) постоянную
5 и переменную составляющие, то и сила F будет содержать постоянную и переменную составляющие.
Датчик 25 тока представляет собой ни что иное, как включенный последовательно
0 в цепь обмотки 16 подвижной катушки 9 первого преобразователя 7 резистор. Падение напряжения на этом резисторе между измерительными клеммами 28 пропорционально протекающему через
5 него току и, следовательно, пропорционально току, протекающему через обмотку подвижной катушки преобразователя-двигателя. Фильтр нижних частот измерителя 26 (фиг. 6) может быть активным или пас0 сивным в зависимости от входных параметров указательного прибора 29. В любом случае он должен отфильтровывать переменную составляющую напряжения настолько, чтобы либо стрелка прибора, либо
5 его цифровое табло давали возможность считывать постоянную составляющую напряжения, которая пропорциональна постоянной составляющей силы, развиваемой первым электродинамическим преобразователем 7.
Прибор 29 может быть отградуирован в единицах силы.
Измеритель 27 переменного тока подключен к тем же клеммам 28 датчика тока 25. Его преобразователь 30 может быть выполнен, например, либо в виде моста из диодов, либо в виде одной из известных комбинаций операционного усилителя с диодами. На входе преобразователя может быть включена, например, емкость, чтобы он реагировал только на переменную составляющую падения напряжения на 25. На выходе преобразователя 30 перед прибором 31 может быть включен фильтр нижних частот.
Блоки 26 и 27, являясь измерителями токов, на своих выходах имеют сигнал в виде электрического напряжения, пропорционального измеряемому току. Следовательно, в делителях 35 и 36 происходит деление напряжений, пропорциональных постоянной и переменной составляющих тока, протекающего через обмотку 16, и, следовательно, пропорциональных постоянной и .переменной составляющих силы, создаваемой преобразователем-двигателем и прикладываемой через элемент 2 воздействия к обьекту - к ткани организма, на напряжение, снимаемое с выхода измерителя 32 переменного напряжения, наводимого в обмотке 11 подвижной катушки 10 второго электродинамического преобразователя 8 и пропорционального виброскорости элемента 2 воздействия Здесь под виброскоростью понимается скорость смещения точки тела при его колебаниях. Виброскорость есть первая производная по времени от вибросмещения, т.е. от смещения точки тела при его вибрациях - колебаниях.
Частные от деления сил на виброскорость представляют полные механические сопротивления - импедансы.
Структура делителей 35 и 36 может быть различной. Они, например, могут быть выполнены на принципе вычитания логарифмов сигналов с последующим антилога- рифмированием или с применением специально разработанных для выполнения операций умножения и деления сигналов микросхем.
Электродинамические преобразователи относятся к обратимым преобразователям, т.е. они могут преобразовывать электрическую величину в механическую, как преобразователь 7, либо наоборот - механическую величину в электрическую, как преобразователь 8. В этом случае, при движении проводника в магнитном поле в нем наводится электродвижущая сила, пропорциональная скорости его движения. Таким образом, можно записать, что на обмотке 11 подвижной катушки 10, связанной с элементом 2 воздействия при его колебаниях - вибрациях, наводится напряжение , 5 где V - скорость перемещения проводника в магнитном поле, т.е виброскорость. Поскольку В и Еконстанты преобразователя, то U пропорционально V.
Нормирующие преобразователи нужны 0 для согласования сигналов, получаемых с выходов соответствующих блоков с возможностями коммутатора и регистратора. Они, например, могут быть в виде масштабирующих усилителей электрических сигналов
5 либо, например, как в случае согласования сигнала с частотомера 24 в виде преобразователя частота-анапог, если регистратор может принять только сигналы в аналоговой форме.
0Если примененный регистратор, как
сейчас распространено, принимаетсигналы в виде цифровых кодов, то эти преобразователи должны содержать АЦП и другие элементы для согласования кодов. Схемы таких
5 преобразователей общеизвестны в технике регистрации и обработки электрических сигналов и не могут быть предметом наших притязаний
Усилитель 14 мощности - обычный уси0 литель электрических CHI налов низкой частоты небольшой мощности (порядка единиц Ватт), так как для вибрационного воздействия требуются небольшие силы и, следовательно, усилитель должен обеспечивать
5 сравнительно небольшие токи в обмотке первого преобразователя 7. Он может иметь инвертирующий и неинвертирующий входы, к которым подключены потенциометр 13 и источник 15 опорного напряжения, а мо0 жет быть с одним входом, к которому блоки 13 и 15 подключены через цепь суммирования напряжений - это нэ принципиально. Единственное специфическое требование заключается в том, что этот усилитель дол5 жен усиливать переменное от блока 13 и постоянное от блока 13 напряжение, но это требование легко выполнимо.
Измеритель 32 напряжения и частотомер 24 снабжен соответствен ко нормирую0 щими преобразователями 39 и 40. Измерители 26 и 27 токов снабжены соответственно нормирующими преобразователями 41 и 42. а делители 35 и 36 снабжены соответственно нормирующими преобразо5 вателями 43 и 44.
Выходной сигнал нормирующего преобразователя 39 пропорционален виброскорости подвижной катушки 10 и, следовательно, виброскорости элемента 2 воздействия.
Выходной сигнал преобразователя 40 пропорционален частоте колебаний подвижной катушки 9 и, следовательно, частоте элемента 2 воздействия.
Выходной сигнал преобразователя 41 пропорционален постоянному току, протекающему через обмотку 16 подвижной катушки 9 и, следовательно, постоянной составляющей силы электродинамического преобразователя-двигателя, и, в конечном итоге, постоянной составляющей силы, воздействующей на биологический объект(организм) через элемент 2 воздействия.
Выходной сигнал преобразователя 42 пропорционален переменному току, протекающему через обмотку 16 подвижной катушки 9, и, следовательно, постоянной составляющей силы электродинамического преобразователя-двигателя, и, в конечном итоге, постоянной составляющей силы, воздействующей на биологический объект (организм) через элемент 2 воздействия.
Выходной сигнал преобразователя 42 пропорционален переменному току, протекающему рез обмотку 16 подвижной катушки 9, и, следовательно, переменной составляющей силы электродинамического преобразователя-двигателя, и, в конечном итоге, переменной составляющей силы, воздействующей на биологический объект (организм) через элемент 2 воздействия.
Выходной .сигнал преобразователя 43 пропорционален отношению напряжения, пропорционального постоянной силе, развиваемой элементом 2 воздействия, а следовательно, и постоянной реакции участника ткани объекта, к переменному напряжению, пропорциональному виброскорости элемента 2 воздействия. Таким образом, выходной сигнал преобразователя 43 пропорционален механическому импедансу участка ткани, на который производится воздействие, зависимому от величины постоянной составляющей силы.
Выходной сигнал преобразователя 44 пропорционален отношению напряжения, пропорционального переменной силе, развиваемой элементом 2 воздействия, а следовательно, и переменной реакции участка ткани объекта, к переменному напряжению, пропорциональному виброскорости элемента 2 воздействия. Таким образом, выходной сигнал преобразователя 44 пропорционален механическому импедансу участка ткани, на который производится воздействие, зависимому от величины переменной составляющей силы.
В устройство по фиг. 9 введен еще п-ка- нальный регистратор 45 временных процессов, к входам которого подключены п выходов коммутатора 46. К входам коммутатора подключены выходы нормирующих преобразователей 39-44.
Работа предлагаемого устройства для
вибрационного воздействия заключается в следующем.
В равновесном положении коромысла 3 (фиг. 1) оператор предварительно, вращая
втулку 4, устанавливает выход элемента 2 воздействия на торцовую плоскость втулки. Включает питание усилителя-ограничителя, усилителя мощности и регулируемого источника 15 постоянного напряжения.
Прикладывает устройство элементом 2 воздействия к участку ткани объекта.
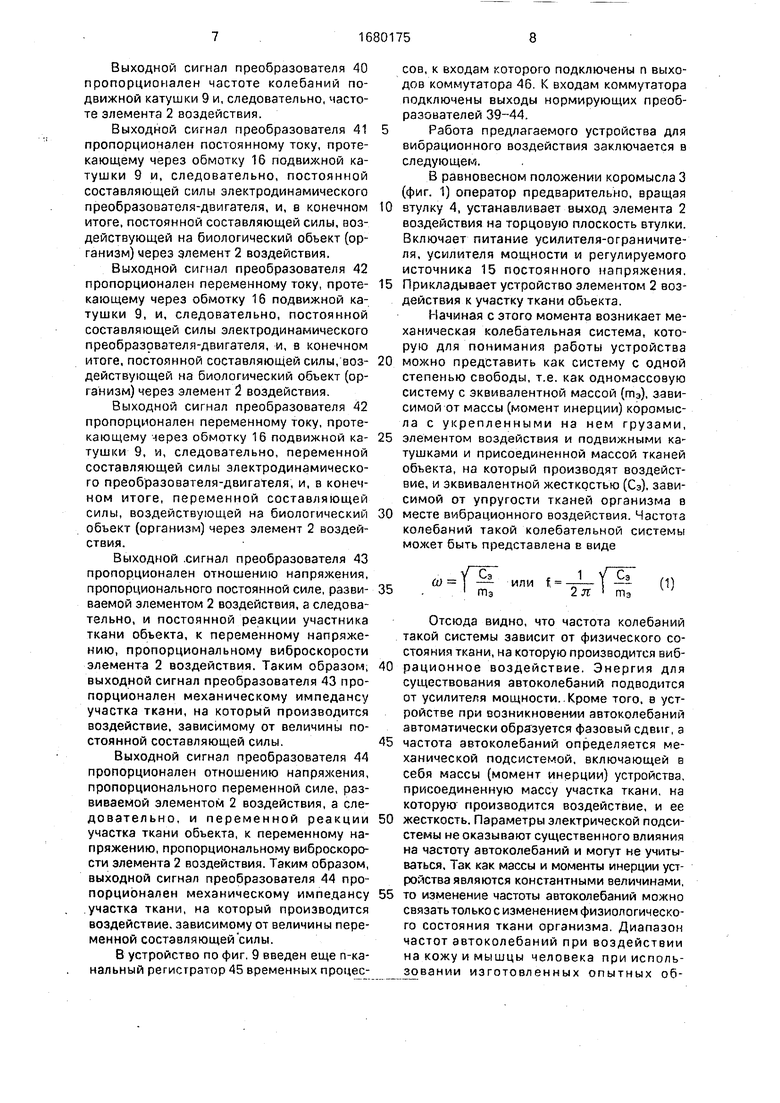
Начиная с этого момента возникает механическая колебательная система, которую для понимания работы устройства
можно представить как систему с одной степенью свободы, т.е. как одномассовую систему с эквивалентной массой (тэ), зависимой от массы (момент инерции) коромысла с укрепленными на нем грузами,
элементом воздействия и подвижными ка тушками и присоединенной массой тканей объекта, на который производят воздействие, и эквивалентной жесткостью (Сэ), зависимой от упругости тканей организма в
месте вибрационного воздействия. Частота колебаний такой колебательной системы может быть представлена в виде
( или f
ГЛэ
1
In
Сэ
тэ
(1)
Отсюда видно, что частота колебаний такой системы зависит от физического состояния ткани, на которую производится вибрационное воздействие. Энергия для существования автоколебаний подводится от усилителя мощности. Кроме того, в устройстве при возникновении автоколебаний автоматически образуется фазовый сдвиг, а
частота автоколебаний определяется механической подсистемой, включающей в себя массы (момент инерции) устройства, присоединенную массу участка ткани, на которую производится воздействие, и ее
жесткость. Параметры электрической подсистемы не оказывают существенного влияния на частоту автоколебаний и могут не учитываться. Так как массы и моменты инерции устройства являются константными величинами,
то изменение частоты автоколебаний можно связать только с изменением физиологического состояния ткани организма. Диапазон частот автоколебаний при воздействии на кожу и мышцы человека при использовании изготовленных опытных образцов устройства в зависимости от места воздействия и состояния организма располагается в пределах от десятков Герц до 200-300 Гц. В этом частотном диапазоне собственные фазовые сдвиги электрического тракта незначительны - единицы градусов и могут не учитываться. Подключение концов обмоток двигателя 7 или генератора 8 должно соответствовать существованию положительной обратной связи.
Регулируя источник 15 постоянного напряжения, оператор изменяет величину постоянной составляющей тока, протекающему от усилителя 14 мощности через обмотку 16 подвижной катушки 9 электродинамического преобразователя-двигателя, подбирая тем самым величину постоянной силы нажатия элемента 2 воздействия на ткани. Последнее приводит к изменению упругости ткани и, следовательно, к изменению частоты колебаний. Подбирая положение подвижного контакта переменного резистора 13, оператор устанавливает необходимый коэффициент передачи в замкнутой автоколебательной системе, в которую входит: описанная механическая колебательная система, датчик виброскорости, которым является электродинамический преобразователь-генератор, и силовозбудитель, которым является электродинамический преобразователь-двигатель. Как известно при определенном (около 90°) фазовом сдвиге между усилием, действующим на механическую колебательную систему, и ее вибросмещением и при достаточном коэффициенте передачи в рассматриваемой электромеханической системе возникают автоколебания, частота которых весьма близка к указанной (1) частоте колебаний. Органы управления источником 15 и потенциометром 13 могут быть снабжены шкалами для оценки величины силового воздействия на ткань.
Таким образом, в устройстве обеспечивается возможность раздельного устанавливания величин постоянной и переменной составляющей силы воздействия, а также приспосабливаемость (адаптация) устройства к параметрам участка, на который производится воздействие, проявляющаяся в зависимости частоты изменения переменной составляющей силы в зависимости от упругости тканей.
При выполнении устройства в объеме второго или третьего пунктов предложенной формулы изобретения появляется возможность изменения начальной частоты колебаний переменной составляющей силы. Действительно, у оператора появляется возможность, выбирая положение грузов 17
и 18 или 22, изменять момент инерции коромысла, т.е. изменять величину тэ в (1). Это позволяет оценивать физиологические свойства ткани участка воздействия и их 5 изменение.
При введении в устройство частотомера оценка изменения физиологических свойств приобретает количественную форму в виде нового параметра - частоты 0 воздействия. Оператор теперь может сопоставить количественное изменение частоты воздействия с величинами постоянной и переменной составляющей силы воздействия, конкретизировать начальную частоту
5 воздействия, т.е. ту частоту, от которой происходит изменение частоты в процессе воздействия.
Выполнение предложенного устройства в объеме одного из первых трех пунктов
0 формулы изобретения появляется возможность использовать его не только для рефлексотерапии, но и для оценки эластичности кожи, тургор здорового и больного человека, выявлять патологически измененные
5 участки и т.п.
При выполнении устройства в объеме четвертого пункта формулы происходит дальнейшее повышение точности задания величины воздействия. Работа устройства в
0 этом объеме признаков дополняется следующими особенностями. В качестве датчика 25 тока может быть использован калибровочный резистор, падение напряжения на котором пропорционально про5 текающему через него току. Так как частота колебания коромысла находится в области низких звуковых (или даже дозвуковых) частот, частотными погрешностями такого датчика тока можно пренебречь.
0 Датчик может быть выполнен, например, так, как выполняют шунты для амперметров с указательными приборами магнитоэлектрического типа.
Имея в виду сказанное и учитывая, что
5 датчик 25 последовательно включен в цепь обмотки 16 подвижной катушки электродинамического преобразователя-датчика, двигателя, ясно, что составляющие тока, протекающего через датчик, пропорцио0 нальны составляющим силы, развиваемой преобразователем 7. Действительно, для него справедлива запись или Fnep+FnocT(lnep.+lnocT.)Bl, где F; Fnepi Fnoci. - силы развиваемые преобразователем, 1;
5 Inep.; IDOCT. - токи, протекающие через обмотку подвижной катушки преобразователя; В1 - конструктивный параметр, пропорциональный величине магнитной индукции В в воздушном зазоре магнитной системы преобразователя и длине Е-провода обмотки подвижной катушки. Этот параметр называют коэффициентом электромеханической связи.
Составляющие падения напряжения на датчике 25; Unep. и DMOCT. пропорциональны составляющим тока Inep., и Пост. и, следовательно, пропорциональны Fnep. и Рпост.
Таким образом, для измерения Fnep. необходимо измерить составляющую Unep. Эта операция в устройстве выполняется измерителем 27 переменного тока. Из падения напряжения на 25 выделяется преобразователь 30, переменная составляющая детектируется и подводится к указателю 31, шкала которого (или цифровое табло) могут быть откалиброваны непосредственно в единицах силы.
В измерителе 26 постоянного тока фильтром нижних частот выделяется постоянная составляющая падения напряжения на 25 и, следовательно, шкала указателя 29 также может быть отградуирована в единицах силы.
То есть в этом случае устройство позволяет количественно измерять величины постоянного и переменного воздействия на ткань объекта, т.е. тем самым повысить точность задания величины воздействия, кроме того, позволяет осуществлять воздействие на сенсорные структуры объекта и в том числе на точки акупунктуры, вибрацией, параметры которой подбирать в зависимости от физиологического состояния области вибровозбуждения, а также адаптивно изменять их в зависимости от изменения физических и физиологических свойств в процессе воздействия.
Выполнение устройства в объеме признаков, внесенных в пятый пункт формулы изобретения, расширяет его информативные возможности - оператор получает сведения о механическом импедансе области воздействия. Достигается это за счет.следующего, Напряжение, наводимое в обмотке 11 подвижной катушки 10, несет информацию о виброскорости элемента 2 воздействия. Следовательно, выходное напряжение измерителя 32 выходного напряжения преобразователя-генератора пропорционально виброскорости элемента 2 воздействия.
В делителе 35 осуществляется операция деления сигнала, пропорционального постоянной составляющей силы воздействия, на сигнал, пропорциональный вибро- скорости в месте воздействия, т.е. в результате получается ни что иное, как механический импеданс в точке воздействия, зависимый от величины постоянной силы, прикладываемой в точке воздействия. Устройство 38 индикации отражает величину этого импеданса.
В делителе 36 осуществляется операция деления сигнала, пропорционального переменной составляющей силы воздействия, на сигнал, пропорциональный виброскорости в месте воздействия. Следовательно, на устройства 38 индикации отражается величина механического импеданса в точке воздействия, зависимая от переменной силы воздействия.
Делители 35 и 36 могут быть как аналоговыми, так и цифровыми, т.е. их структура должна соответствовать природе
сигналов, выдаваемых измерителями 26, 27 и 32.
Введение в устройство n-канального регистратора 45 временных процессов и соответствующего ему по выходам коммутатора
46 позволяет оператору производить сопоставления наиболее выгодным, с точки зрения анализа, образом информативных материалов: частоты вибровоздействия, постоянной и переменной силы воздействия, виброскорости в точке воздействия, механических импедансов в точке воздействия. Регистратор 45 может быть либо в виде самопишущего n-канального прибора, либо в виде цифропечатающегоустройства, либо в виде дисплея с памятью. В зависимости от типа регистратора выбирают при выполнении устройства и тип коммутатора 46. В любом случае между входами коммутатора 46 и выходами частотомера 24,
измерителей переменного напряжения 32, постоянного 26 и переменного 27 токов, а также делителей 35 и 36, должны быть установлены нормирующие преобразователи приводящие выходные сигналы указанных
измерителей к виду, который может быть воспринят регистратором.
Формула изобретения
1. Устройство для вибрационного воз5 действия на ткани организма, содержащее корпус, в котором помещен электромеханический преобразователь, связанный о одним из плеч коромысла, на втором плече которого закреплен элемент воздейст0 вия, размещенный с возможностью перемещения в осевом канале втулки, расположенной на рабочей поверхности корпуса, отличающееся тем, что, с целью повышения точности задания величины
5 воздействия, электромеханический преобразователь выполнен з виде электродинамического преобразователя, подвижная катушка которого закреплена на одном плече коромысла и в устройство введен второй электродинамический преобразовательгенератор, подвижная катушка которого закреплена на другом плече коромысла и подключена к входу усилителя-ограничителя, выход которого через потенциометр соединен с одним из входов усилителя мощности, с другим входом которого связан выход регулируемого источника опорного напряжения, при этом выход усилителя мощности подключен к подвижной катушке первого электромеханического преобразователя.
2.Устройство по п. 1,отличающее- с я тем, что, с целью регулирования частоты вибрационного воздействия, коромысло снабжено двумя расположенными по разные стороны от его оси подвижными груза- ми с фиксаторами,
3.Устройство по п. 1,отличающее- с я тем, что, с целью регулирования частоты вибрационного воздействия, коромысло снабжено третьим плечом, на котором уста- новлен подвижный груз с фиксатором.
4.Устройство поп. 1,отличающее с я тем, что, с целью регулирования механической силы воздействия на биологический объект, в него введены последовательно со- единенный с подвижной катушкой первого электродинамического преобразователя датчик тока и измерители постоянного и
переменного тока, причем измерительные клеммы датчика тока подключены к входам измерителей постоянного и переменного токов.
5.Устройство поп.4, отличающее- с я тем, что, с целью измерения механического импеданса области воздействия, в него введен измеритель переменного напряжения, подключенный к обмотке подвижной катушки электродинамического преобразователя-генератора,и два блока деления с узлами индикации выходного сигнала, одними входами подключенные к выходу измерителя напряжения, к другим входам которых подключены соответственно выходы измерителя постоянного и измерителя переменного токов.
6.Устройство по п. 6, о т л и ч а ю щ е е- с я тем, что, с целью повышения удобства эксплуатации устройства, в него введены n-канальный регистратор временных процессов, коммутатор, выходы которого под- ключены к входам регистратора, и частотомер, соединенный с выходом усилителя мощности, а выходы измерителя напряжения, измерителей токов, частотомера и блоков арифметического деления связаны с входами коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибростенд | 1980 |
|
SU947673A1 |
| Вибростенд | 1982 |
|
SU1045039A1 |
| Электродинамический вибростенд | 1980 |
|
SU946686A1 |
| Устройство для измерения механической добротности объекта | 1978 |
|
SU763715A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1986 |
|
SU1388728A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1985 |
|
SU1303837A1 |
| Устройство для возбуждения и измерения колебаний | 1983 |
|
SU1384342A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1987 |
|
SU1446483A1 |
| СПОСОБ ГРАДУИРОВКИ СТРОБОСКОПИЧЕСКИХ УСТРОЙСТВ ДЛЯ ИЗМЕРЕНИЯ ПРИРАЩЕНИЙ МАГНИТНОГО ПОТОКА | 1973 |
|
SU408242A1 |
| Весы с электромагнитным уравновешиванием | 1988 |
|
SU1515065A1 |

Изобретение относится к медицине, а именно к диагностическим устройствам и к устройствам для оефлексотерапии. Цель изобретения - повышение точности задания величины воздействия Указанная цель достигается за счет того, что в устройстве для вибрационного воздействия на ткани организма содержащем корпус 1, в котором размещены первый электромеханический преобразователь элемент 2 воздействия, коромысло 3 и втулку 4, электромеханический преобразователь выполнен в виде электродинамического преобразователя - двигателя 7 и в устройство i дополнительно введены второй электродинамический пре- образователь-гене атор 8, усилитель-ограничитель 12, потенциометр 13 усилитель 14 мощности и источник 15 опорного напряжения 5 з.п ф-лы, 9 ил
Фиг. 1
Ю
V/
22
-Z 4 IT
/7777Фиг. 2
,ж
з
Я
Фиг. 5
x
Фиг Л
jj
Фиг. 6
/Ш п
45
Fnocm
Фиг. 9
| Устройство для механических испытаний образцов сложной формы | 1983 |
|
SU1216703A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
