Изобретение относится к железнодорожной автоматике и предназначено для перевода поворотных рельсов стрелочных переводов.
Цель изобретения - повышение надежности.
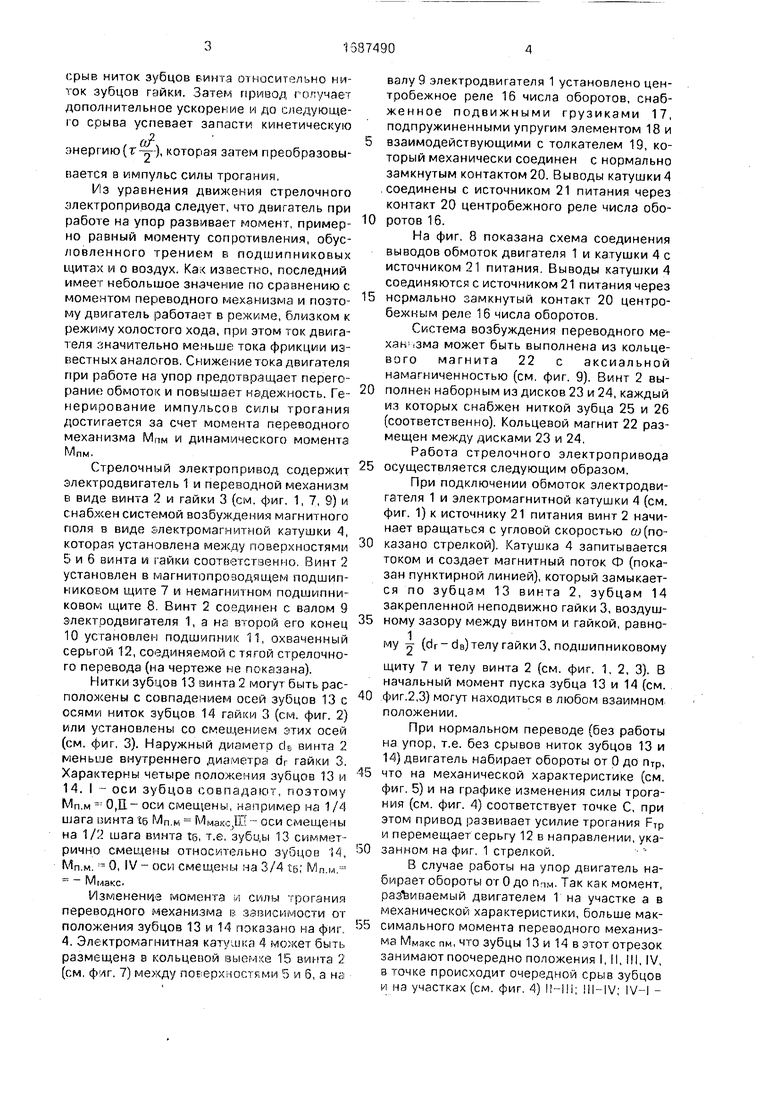
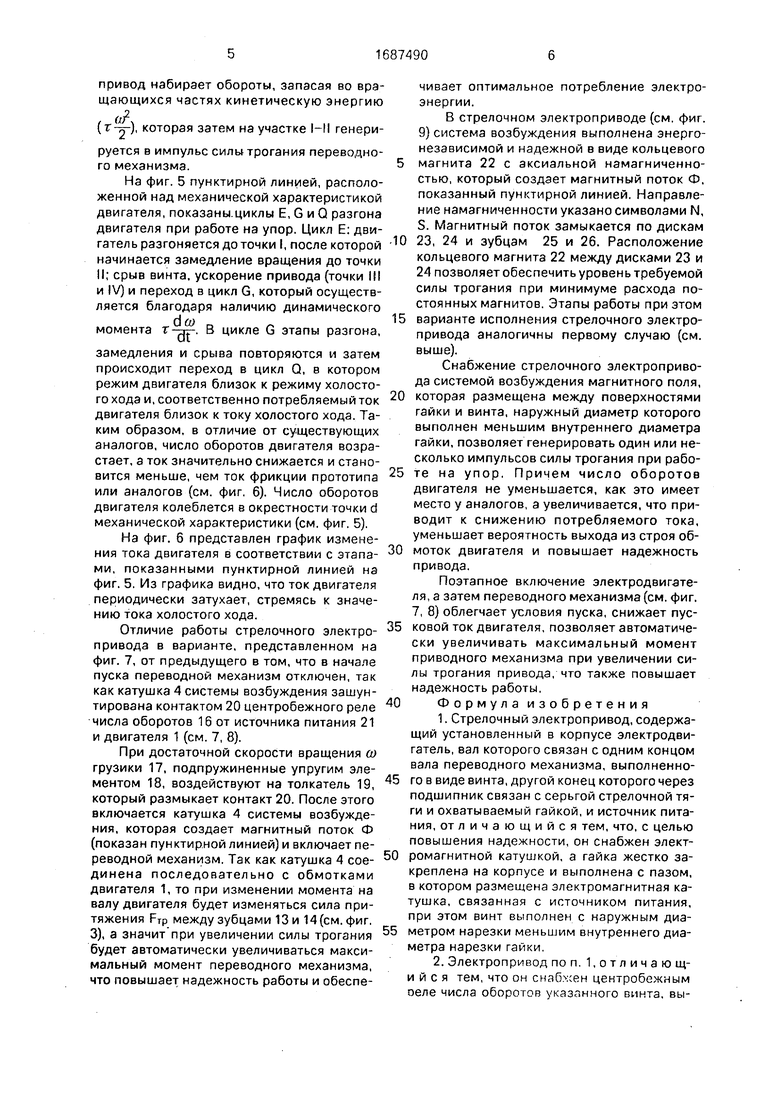
На фиг. 1 изображен стрелочный электропривод с разрезом по оси вращения винта передаточного механизма, общий вид; на фиг. 2 и 3 - фрагменты расположения ниток зубцов винта и гайки; на фиг. 4 - график изменения момента сопротивления переводного механизма и силы трогания стрелки; на фиг. 5 - механическая и скоростная характеристики электродвигателя стрелочного привода; на фиг. 6 график изменения тока двигателя при работе на упор; на фиг. 7- стрелочный электропривод с центробежным реле числа оборотов вала, общий вид; на фиг. 8 - схема подключения обмоток электродвигателя и электромагнитной катушки; на фиг. 9 - стрелочный электропривод, винт которого выполнен из кольцевых магнитов с аксиальной намагниченностью, общий вид.
Для доказательства достижения положительного эффекта запишем полное уравнение движения предлагаемого стрелочного электропривода
Мдв ± Мпм Мс
где Мдв - момент, развиваемый двигателем;
Мпм - момент сил переводного механизма;
Мс - момент сопротивления, обусловленный трением в подшипниковых щитах и о воздух;
г- момент инерции вращающихся частей привода;
а - угловая скорость привода;
t -- время.
Генерирование импульса силы трогания в предлагаемом стрелочном электроприводе достигается за счет знакопеременного момента сил переводного механизма МПм, т.е. за счет знакопеременного момента сил магнитного тяжения ниток зубцов винта к ниткам зубцов гайки при работе на упор или при трогании примерзшей стрелки с места. В этом случае при вращении происходит
СП
с
о
00
XJ ю о
срыв ниток зубцов винта относительно ниток зубцов гайки. Затем привод гсгучает дополнительное ускорение и до следующего срыва успевает запасти кинетическую
энергию (т -у-), которая затем преобразовывается в импульс силы трогания.
Из уравнения движения стрелочного электропривода следует, что двигатель при работе на упор развивает момент, примерно равный моменту сопротивления, обусловленного трением в подшипниковых щитах и о воздух. Как известно, последний имеет небольшое значение по сравнению с моментом переводного механизма и поэтому двигатель работает в режиме, близком к режиму холостого хода, при этом ток двигателя значительно меньше тока фрикции известных аналогов. Снижение тока двигателя при работе на упор предотвращает перегорание обмоток и повышает надежность. Генерирование импульсов силы трогания достигается за счет момента переводного механизма МПм и динамического момента Мпм.
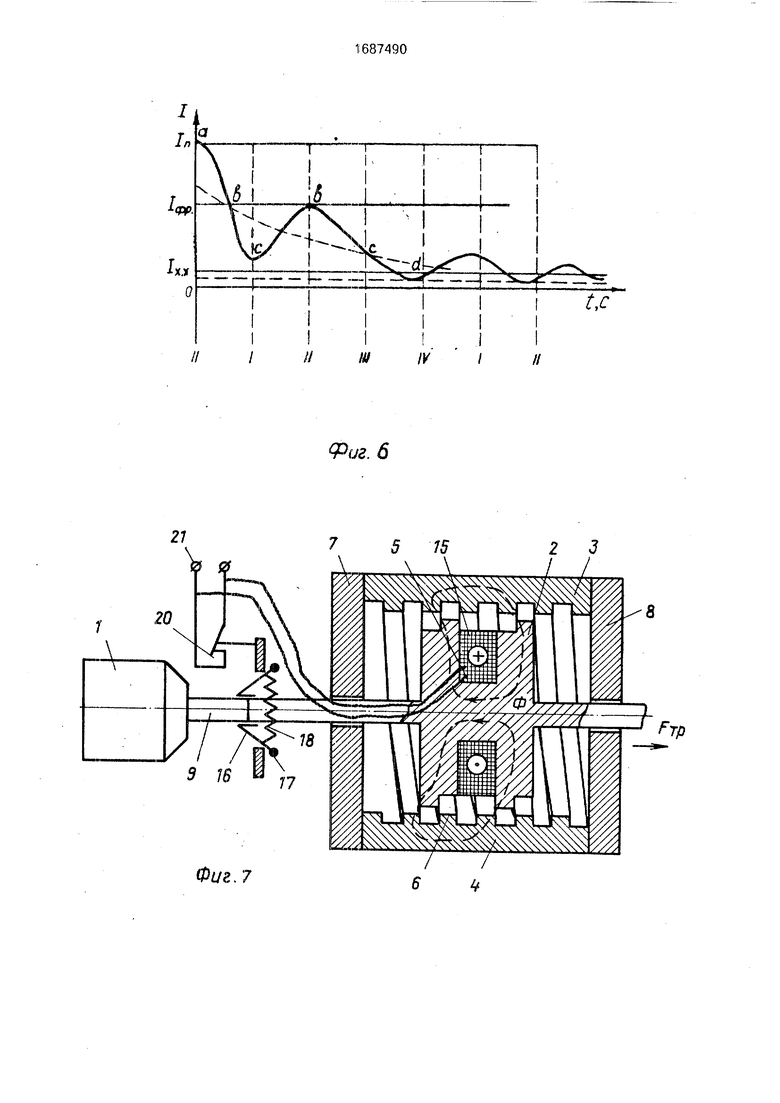
Стрелочный электропривод содержит электродвигатель 1 и переводной механизм в виде винта 2 и гайки 3 (см. фиг. 1, 7, 9) и снабжен системой возбуждения магнитного поля в виде электромагнитной катушки 4, которая установлена между поверхностями 5 и 6 винта и гайки соответственно. Винт 2 установлен в магнитопроводящем подшипниковом щите 7 и немагнитном подшипниковом щите 8, Винт 2 соединен с валом 9 электродвигателя 1, а на второй его конец 10 установлен подшипник 11, охваченный серьгой 12, соединяемой с тягой стрелочного перевода (на чертеже не показана).
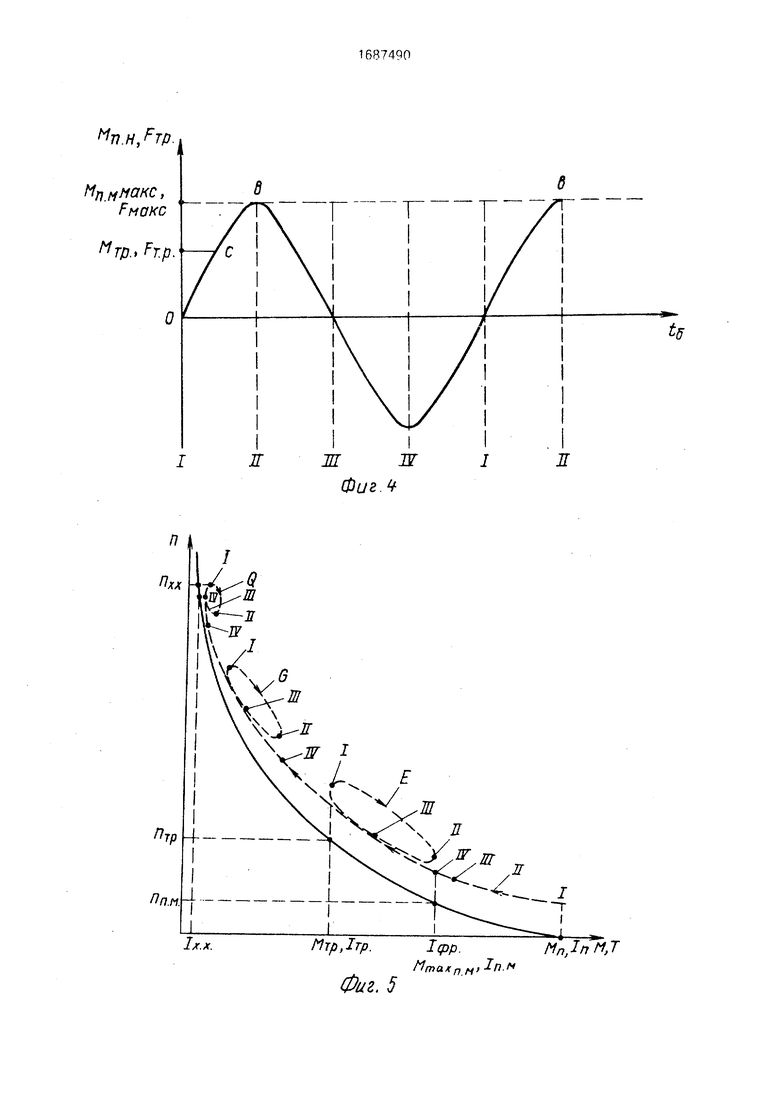
Нитки зубцов 13 винта 2 могут быть расположены с совпадением осей зубцов 13 с осями ниток зубцов 14 гайки 3 (см. фиг. 2) или установлены со смещением этих осей (см. фиг. 3). Наружный диаметр de винта 2 меньше внутреннего диаметра dr гайки 3. Характерны четыре положения зубцов 13 и 14. I - оси зубцов совпадают, поэтому Мп.м ОД- оси смещены, например на 1/4 шага винта tg Мп.м ММакс,Ш - оси смещены на 1/2 шага винта те. т.е. зубцы 13 симметрично смещены относительно зубцов 14, Мп.м. О, IV - оси смещены на 3/4 ta; Мп.м.
Ммакс.
Изменение момента и силы трогания переводного механизма в зависимости от положения зубцов 13 и 14 показано на фиг. 4. Электромагнитная катушка 4 может быть размещена в кольцевой выемке 15 винта 2 (см. фиг. 7) между поверхностями 5 и 6, а на
валу 9 электродвигателя 1 установлено центробежное реле 16 числа оборотов, снабженное подвижными грузиками 17, подпружиненными упругим элементом 18 и
взаимодействующими с толкателем 19, который механически соединен с нормально замкнутым контактом 20. Выводы катушки 4 соединены с источником 21 питания через контакт 20 центробежного реле числа оборотов 16.
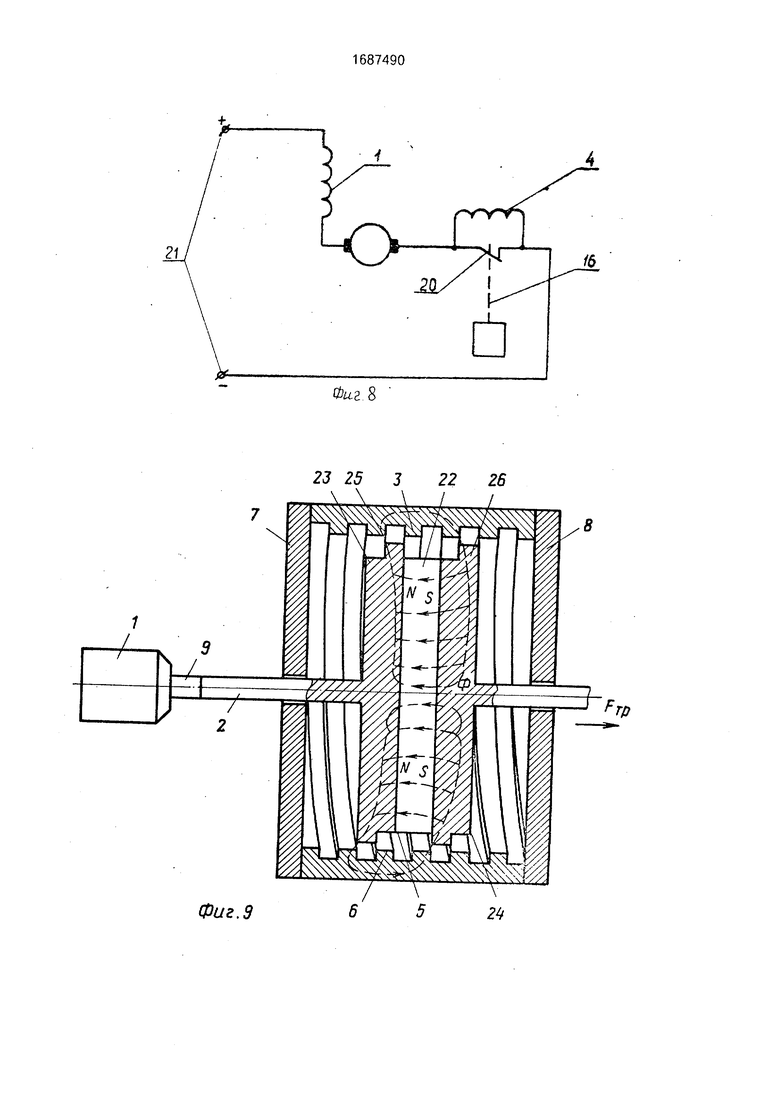
На фиг. 8 показана схема соединения выводов обмоток двигателя 1 и катушки 4 с источником 21 питания. Выводы катушки 4 соединяются с источником 21 питания через
нормально замкнутый контакт 20 центробежным реле 16 числа оборотов.
Система возбуждения переводного ме- хан зма может быть выполнена из кольцевого магнита 22 с аксиальной намагниченностью (см. фиг. 9). Винт 2 выполней наборным из дисков 23 и 24, каждый из которых снабжен ниткой зубца 25 и 26 (соответственно). Кольцевой магнит 22 размещен между дисками 23 и 24.
Работа стрелочного электропривода
осуществляется следующим образом.
При подключении обмоток электродвигателя 1 и электромагнитной катушки 4 (см, фиг. 1) к источнику 21 питания винт 2 начинает вращаться с угловой скоростью а)(г оказано стрелкой). Катушка 4 запитывается током и создает магнитный поток Ф (показан пунктирной линией), который замыкается по зубцам 13 винта 2, зубцам 14 закрепленной неподвижно гайки 3, воздушному зазору между винтом и гайкой, равному (dr- dB)телу гайки 3, подшипниковому
щиту 7 и телу винта 2 (см. фиг. 1, 2, 3). В начальный момент пуска зубца 13 и 14 (см.
фиг.2.3) могут находиться в любом взаимном положении.
При нормальном переводе (без работы на упор, т.е. без срывов ниток зубцов 13 и 14) двигатель набирает обороты от 0 до птр,
что на механической характеристике (см. фиг. 5) и на графике изменения силы трогания (см. фиг. 4) соответствует точке С, при этом привод развивает усилие трогания FTp и перемещает серьгу 12 в направлении, указанном на фиг. 1 стрелкой.
В случае работы на упор двигатель набирает обороты от 0 до Ппм. Так как момент, разбиваемый двигателем 1 на участке а в механической характеристики, больше мак5 симального момента переводного механизма Ммзкс пм. что зубцы 13 и 14 в этот отрезок занимают поочередно положения I, II, III, IV, в точке происходит очередной срыв зубцов и на участках (см. фиг. 4) II- III; III-IV; IV привод набирает обороты, запасая во вращающихся частях кинетическую энергию
/ (, II
( T-J-), которая затем на участке HI генерируется в импульс силы трогания переводного механизма.
На фиг. 5 пунктирной линией, расположенной над механической характеристикой двигателя, показаны циклы Е. G и Q разгона двигателя при работе на упор. Цикл Е: двигатель разгоняется до точки I, после которой начинается замедление вращения до точки II; срыв винта, ускорение привода (точки III и IV) и переход в цикл G, который осуществляется благодаря наличию динамического
da)
момента т-тг-. В цикле G этапы разгона,
замедления и срыва повторяются и затем происходит переход в цикл Q, в котором режим двигателя близок к режиму холостого хода и, соответственно потребляемый ток двигателя близок к току холостого хода. Таким образом, в отличие от существующих аналогов, число оборотов двигателя возрастает, а ток значительно снижается и становится меньше, чем ток фрикции прототипа или аналогов (см. фиг. 6). Число оборотов двигателя колеблется в окрестности точки d механической характеристики (см. фиг. 5).
На фиг. 6 представлен график изменения тока двигателя в соответствии с этапа- ми, показанными пунктирной линией на фиг. 5. Из графика видно, что ток двигателя периодически затухает, стремясь к значению тока холостого хода.
Отличие работы стрелочного электро- привода в варианте, представленном на фиг. 7, от предыдущего в том, что в начале пуска переводной механизм отключен, так как катушка 4 системы возбуждения зашун- тирована контактом 20 центробежного реле числа оборотов 16 от источника питания 21 и двигателя 1 (см. 7, 8).
При достаточной скорости вращения ш грузики 17, подпружиненные упругим элементом 18, воздействуют на толкатель 19, который размыкает контакт 20. После этого включается катушка 4 системы возбуждения, которая создает магнитный поток Ф (показан пунктирной линией)и включает переводной механизм. Так как катушка 4 сое- динена последовательно с обмотками двигателя 1, то при изменении момента на валу двигателя будет изменяться сила притяжения FTp между зубцами 13 и 14 (см. фиг. 3), а значит при увеличении силы трогзния будет автоматически увеличиваться максимальный момент переводного механизма, что повышает надежность работы и обеспечивает оптимальное потребление электроэнергии.
В стрелочном электроприводе (см. фиг. 9) система возбуждения выполнена энергонезависимой и надежной в виде кольцевого магнита 22 с аксиальной намагниченностью, который создает магнитный поток Ф, показанный пунктирной линией. Направление намагниченности указано символами N, S. Магнитный поток замыкается по дискам 23, 24 и зубцам 25 и 26. Расположение кольцевого магнита 22 между дисками 23 и 24 позволяет обеспечить уровень требуемой силы трогания при минимуме расхода постоянных магнитов. Этапы работы при этом варианте исполнения стрелочного электропривода аналогичны первому случаю (см. выше).
Снабжение стрелочного электропривода системой возбуждения магнитного поля, которая размещена между поверхностями гайки и винта, наружный диаметр которого выполнен меньшим внутреннего диаметра гайки, позволяет генерировать один или несколько импульсов силы трогания при работе на упор. Причем число оборотов двигателя не уменьшается, как это имеет место у аналогов, а увеличивается, что приводит к снижению потребляемого тока, уменьшает вероятность выхода из строя обмоток двигателя и повышает надежность привода.
Поэтапное включение электродвигателя, а затем переводного механизма (см. фиг, 7, 8) облегчает условия пуска, снижает пусковой ток двигателя, позволяет автоматически увеличивать максимальный момент приводного механизма при увеличении силы трогания привода, что также повышает надежность работы.
Формула изобретения
1. Стрелочный электропривод, содержащий установленный в корпусе электродвигатель, вал которого связан с одним концом вала переводного механизма, выполненного в виде винта, другой конец которого через подшипник связан с серьгой стрелочной тяги и охватываемый гайкой, и источник питания, отличающийся тем, что, с целью повышения надежности, он снабжен электромагнитной катушкой, а гайка жестко закреплена на корпусе и выполнена с пазом, в котором размещена электромагнитная катушка, связанная с источником питания, при этом винт выполнен с наружным диаметром нарезки меньшим внутреннего диаметра нарезки гайки.
2. Электропривод по п. 1,отличаю щ- и и с я тем, что он снлОхен центробежным оеле числа оборотов указанного винта, выМОЛМРННОГО с патом внутри « iropoi о pa IMPс источником питания череч контакт центрощоня эл ктромаг нигная катушкп ср-папнаябежного роле
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для измерения площади непрозрачных плоских гибких материалов (кож, мехов, тканей и т.п.) | 1939 |
|
SU61502A1 |
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ С АВТОНОМНЫМИ ИСТОЧНИКАМИ ПИТАНИЯ | 1997 |
|
RU2136104C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД | 2009 |
|
RU2395637C1 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СТАРТОВЫМИ ПОЛЮСАМИ | 1996 |
|
RU2103786C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| Устройство управления стрелочным переводом | 1989 |
|
SU1684146A1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1999 |
|
RU2145460C1 |
| ЧЕТЫРЕХЦИЛИНДРОВЫЙ ОППОЗИТНЫЙ ДВИГАТЕЛЬ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2016 |
|
RU2638241C1 |
| ВИНТОВОЙ СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД С ВНУТРЕННИМ ЗАМЫКАНИЕМ ШИБЕРА, ВЗРЕЗНОЙ, ДЛЯ РАБОТЫ С ВНЕШНИМИ ЗАМЫКАТЕЛЯМИ ОСТРЯКОВ СТРЕЛКИ И ПОДВИЖНЫХ СЕРДЕЧНИКОВ КРЕСТОВИН | 1998 |
|
RU2181678C2 |
Изобретение относится к железнодорожной автоматике и предназначено для перевода поворотных рельсов стрелочных переводов. Цель изобретения - повышение надежности. Указанная цель достигается тем, что винт 2, вращаясь с угловой скоростью в момент включения электромагнитной катушки 5, позволяет генерировать импульсы силы трогания при переводе серьги 12, что приводит к снижению потребляемого тока 2 з.п ф лы, 9 ил.
13
Фиг 2
N т л т
и
,
о
ст
rr
КОС
tc
«V
J
s
fel ч / h V
(
И
0
+-J
I
I
т i
t
.
1 I I
L .
I
i
X
C3
Ю
I
о cr
V
г- oo
to
CNJ,
00
| Авторское свидетельство СССР № 1150135, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
