Изобретение относится к электротехнике,, в частности к реверсивным вентильным электродвигателям для позиционных следящих электроприводов.
Целью изобретения является повьппе- ние .надежности работы и энергетических показателей за счет изменения алгоритма управления ключами преобразователя частоты при реверсе.
На фиг.1 представлена функциональ-JO анодной группы ключей преобразовате
ная схема реверсивного вентильного электродвигателя; на фиг.2 - принципиальная схема блока формирования сигналов управления преобразователем частоты; на фиг.З - временные диаграммы напряжений в узлах функциональной схемы.
Реверсивный вентильный электродвигатель (фиг.1) содержит синхронную машину 1, вал которой механически связан с датчиком 2 положения ротора и датчиком 3 частоты вращения, преобразователь 4 частоты, к выходу которого через датчик 5 тоЛа подключена якорная обмотка синхронной машины 1, а входы подключены к выходам блока 6 формирования сигналов управления преобразователем 4 частоты, основные входы 7 которого подключены к выхо
дам датчика 2 положения ротора, а дополнительный вход 8 управления катодной группой клк)чей преобразователя частоты подключен к выходу гисте- реэисного реле 9, вход которого соедикген с выходом датчика 5 тока, логи- 35 тока.
ческий элемент 10 ЗАПРЕТ, один вход которого соединен череэ пороговый элемент 11 с выходом датчика 3 частоты вращения, а другой вход подключен к выходу логического элемента 12 ИСКЛЮЧАЮЩЕЕ ИЛИ, один вход которого соединен с выходом датчика 13 направления вращения, связанного с датчиком 2 положения рот(рра, а другой объединен с дополнительным входом 14 задания сигнала направления вращения блока 6 формирования сигналов управления преобразователем 4 частоты до- полнительный вход 15 управления анодной группой ключей преобразователя 4 частоты которого соединен с выходом логического элемента 10 ЗАПРЕТ.
Блок 6 формирования сигналов управления преобразователем частоты (фиг.2) может быть реализован на базе различных логических схем, например на трех логических элементах ИСКЛЮЧАЮЩЕЕ ИЛИ 16-18. Выходы логических элементов 16-18 соединены с входами функционального преобразователя 19, которЬЕЙ реализован в данном случае в виде дешифратора 20 двоичного трехразрядного кода в позиционный код и шести двухвходовых логических элементов 21-26 2-ИЛИ. Первые три выхода 27-29 функционального преобразователя 19 связаны с цепями управления
5
0
ля 4 частоты через логические элементы ЗАПРЕТ 30-32, реализованные на логических элементах 2-Й, один из входов которых является управляющим и выполнен инверсным а второй - информационным. Управляющие входы логических элементов ЗАПРЕТ 30-32 объединены и образуют дополнительный вход 15 блока 6.
Вторые три выхода 33-35 функционального преобразователя -15 связаны с цепями управления катод н-ой группь ключей преобразователи Д частоты через логические элементы ЗАПРЕТ 36- 38. Упр,авляющие входы логических эле- MeiiTOB ЗАПРЕТ 36-38 обтзед шнены и образуют вход 8 блока 6.
Датчик 5 тока может содержать по числу секций якорной обмотки три чувствительных элемента, каждьш из которых включен в одну из секций обмотки якоря синхронной машины 1. Выходы чувствительных элементов образуют трехканальный выход дат-чика 5
0
0
5
0
5
Датчик 5 тока может содержать чувствительных элемента, первый из KoTopbix включен в одну из групп ключей преобразователя 4 частоты, например в катодную, а второй - в анодную группу диодом моста обратного тока 1феобразователя 4 частоты. При этом выходы первого и второго чувствительных элементов образуют двухканальный выход датчика 5 тока.
Датчик 5 тока может быть выполнен с одноканальным выходом и содержать один чувствительный элемент, включен- ньй в одну из групп ключей преобразователя 4 частоты, например в катод-. ную. При этом последовательно в цепь преобразователя 4 частоты с мостом обратного тока включен диод в направлении согласном источнику питания, а встречно - параллельно цепи, состоящей из чувствительного элемента и указанного диода, включен второй диод.
Выход чувствительного элемента является выходом датчика 5 тока.
Чувствительные элементы датчика 5 тока могут быть любого типа, например резистивные или в виде датчиков Хол- 5 ла, расположенных в зазоре магнито- провода несущего обмотку, по которой протекает измеряемый ток.
Гистерезисное реле 9 в случае, когда датчик 5 тока имеет одноканаль- О ный выход, выполнено на основе компаратора с положительной обратной связью. Уровень срабатывания гистерезис- ного реле задается.
момент времени на вход 14 блока 6 поступает сигнал на смену направления вращения. Вентильньй электродвигатель переводится в режим динамического торможения, так как в режиме торможения на управляющем входе логическс1го элемента 10 ЗАЛРЕТ появляется разрешающий сигнал с выхода логического элемента 12 ИСКЛЮЧАЮЩЕЕ ИЛИ, на выходе порогового элемента 11 присутствует единичнЁш логический сигнал, сигнализирующий, что частота вращения превышает заданное значение Вентильный электродвигатель отключен от
В случае, когда датчик 5 тока источника питания. Ток динамического
ет - Hoгoкaнaльный выход, например трехканальный, то гистерезисное реле 9 выполняется на основе трех компараторов, причем выходы компараторов подключаются к входам трехвходового 20 логического сумматора, выход которого является выходом гистерезисного реле. Пороговый элемент 11 принципиально может быть выполнен на базе аналогового компаратора. В общем случае применяются аналоговые компараторы без гистерезиса, т.е. без обратной связи и без элементов временной задержки. На вход такого порогового элемента подается аналоговый сигнал с датчика 3 частоты вращения, выполненного, например, на базе тахогене- ратора постоянного тока. ,
25
30
35
40
Возможно выполнение порогового элемента 11 на базе различных цифровых схем сравнения, если датчик 3 частоты вралАбния формирует на своем выходе информацию, представленную в цифровом коде. Пороговьй элемент 11 может быть выполнен в виде частотного дискрт-шнатора 4
Датчик 13 направления вращения выполняется в виде блока, вход которого подключается к выходу датчика жения ротора. При смене направления вращения на выходе датчика 13 меня- чению. ется уровень логического сигнала.
Датчик 13 направления вращения может быть выполнен в виде реверсивно- 50 чи
торможения замыкается через открытый транзистор катодной группы ключей преобразователя 4 частоты и диод анодной группы моста обратного ока.
На интервале времени t ток двигателя меняет знак и нарастает под действием ЭДС вращения. В момент времени ток двигателя достигает порога срабатывания гистерезисного реле 9, что приводит к появлению на входе 8 блока 6 единичного логического сигнала. Закрываются все ключи катодной группы преобразователя 4 частоты. Ток электродвигателя на интервале времени t,- t4 спадает через обмотку синхронной машины 1, диоды моста обратного тока и источник питания, который по отношению к этому току включен встречно. В момент времени ток достигает порога отпускания гистерезисного реле 9, но так как пороговый элемент 11 сигнализирует о превышении частотой вращения заданного значения двигатель опять переводится в режим динамичес- кого торможения. Ток двигателя с момента времени t опять нарастает под, действием ЭДС вращения. Процесс повторяется до момента времени t, когда 2 поло-45 пороговый элемент 11 фиксирует равенство частоты вращения заданному знаТаким образом, на интервале време- tj. вентильный электродвигатель
2
го тахогенератора постоянного тока, установленного на валу синхронной машины 1 .
Реверсивный вентильньп электродвигатель работает следующим образом (фиг.З) .
Предположим, что вентильный электродвигатель на интервале времени
Г
tj вращается 5 например, вправо. В
момент времени на вход 14 блока 6 поступает сигнал на смену направления вращения. Вентильньй электродвигатель переводится в режим динамического торможения, так как в режиме торможения на управляющем входе логическс1го элемента 10 ЗАЛРЕТ появляется разрешающий сигнал с выхода логического элемента 12 ИСКЛЮЧАЮЩЕЕ ИЛИ, на выходе порогового элемента 11 присутствует единичнЁш логический сигнал, сигнализирующий, что частота вращения превышает заданное значение Вентильный электродвигатель отключен от
Таким образом, на интервале време- tj. вентильный электродвигатель
2
находится в режиме двухпозиционного токового регулирования, причем в импульсе регулирования ток двигателя нарастает под действием ЭДС вращения, а в паузе совпадает с отдачей энер- - гии, запасенной в индуктивности якор ной обмотки в сеть. Такой энергетически выгодный режим особенно целесообразно применить в высокоинерци512
онных электроприводах, в системах электроснабжен1-ш aBTOHOMHE ix объектов выполненных с возможностью рекупера- ЦИ.И энергии со сторо Ь нагрузки. В момент времени t. срабатывает пороговый элемент 11, поскольку час- тота врещения Б процессе торнол ения снизилась до установленной величины Ключи анодной группы преобразователя 4 частоты разблокируются и на интер- вале времени t.- t электродвигагелг переводится в режим торможения проти )зовключением. Ток двигателя нараста- ет под действием согласно включенных напряжения питания и ЭДС вра1цення. В момент времени t ток двигателя достигает порога срабатывания гистере- зисиого реле 9, появляется управляго- щий сигнал 8 блока 6 и па интерзале времени tg- ty электродвигателтз перс водится в режим динам зческого торможения j так как при этом блокируется одна из групп преобразователя 4 час- TOTMj а ключи второй гр уппы перекл О- чаются в последовательности,, соот- ветстпующей режик у противовключения. Так как ЭДС вращепияуменьшилась,, то она не может обеспечить дальнейшего нарастания тока двигателя в режиме динамического торможен 1я и ток спа- дает до порога отпускания гистере- зиспого реле 9. С момента .;егп г., процесс повторяется до момента времени to 5 когда частота вращения становится нулевой,, при этом имее-- место периодическое потреблен т siiep
А ИИ из сети.
С момента времени tg вентши)|;ый электродвигатель переводится в Пуск Ч Ограничение тока в зтом cjiy- чае происходит а 1алогично тому, как это реализовано в вентильном электродвигателе, принятом за прототип,
Таким образом, повьаление надеи-пюс пости обеспечивается за счет псклю- чення возможности перегрузки силовр 1х ключей преобразователя частоты и раз ма1 ничивания магнита индуктора потоком якоря при торможении,
Ограничение тока вентильного э:гек тродвигателя предложенным образом позволяет Б сравнении с вентильным злектродвигателем, в котором ограничение тока в режиме торможения г;роис ходит закрытием всех ключей преобра- зователя частоты., снизить динамичес- кке потери в ключах пресбразс вателя 4acToTbJs потери в синхронной машине на вихревые токи и гистерезис.
71283928°
ния вращения блока формирования сиг- ния анодной группой ключей преобра- налов управления преобразователем зователя частоты которого соединен с частоты, дополнительньй вход управле- выходом логического элемента J/uirb .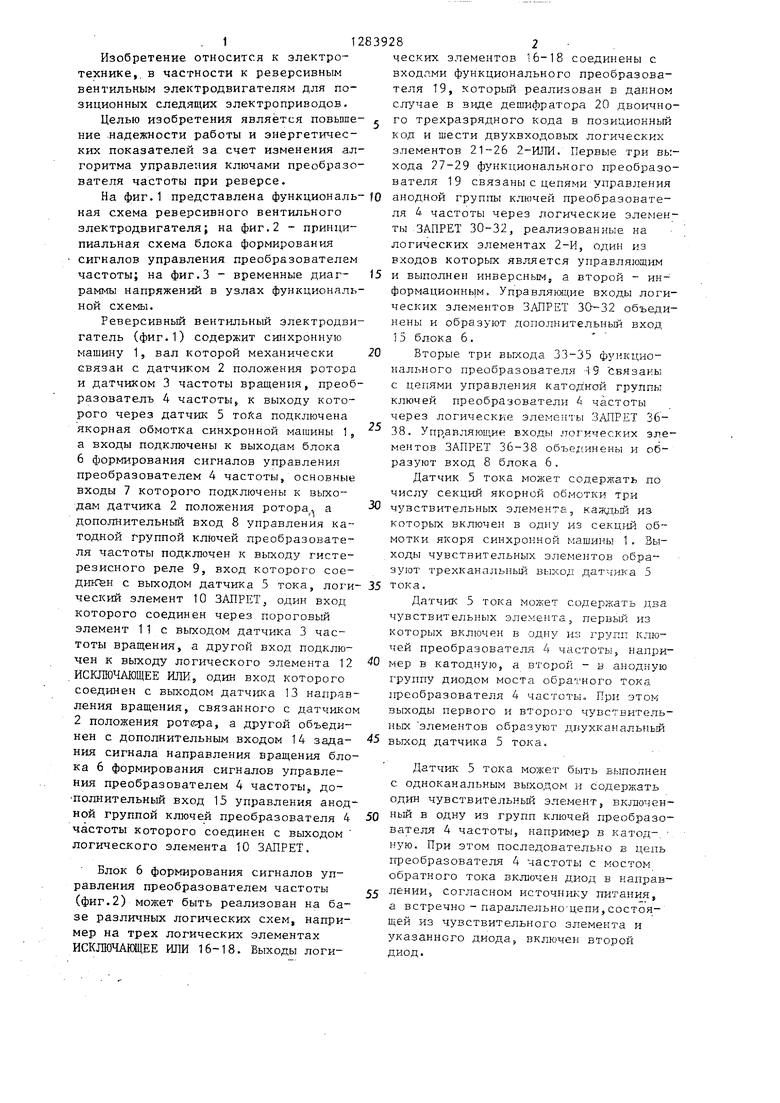


| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1989 |
|
SU1642576A2 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1988 |
|
SU1700703A1 |
| Вентильный электродвигатель с токовым регулированием | 1989 |
|
SU1677807A2 |
| Вентильный электродвигатель с токовым регулированием | 1987 |
|
SU1494188A1 |
| Вентильный электродвигатель | 1985 |
|
SU1354351A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |

Изобретение относится к электротехнике и может быть использовано в позиционных следящих системах. Целью изобретения является повышение надежности работы и энергетических показателей. С этой целью в реверсивный вентильный электродвигатель с регулируемым торможением введены пороговый элемент 11, датч1ж 13 направления вращения, логические элементы 12 и 10 ИСКЛЮЧАКЩЕЕ ИЛИ и ЗАПРЕТ, а блок 6 формирования сигналов ущзавления преобразователем (П) 4 частоты снаб-, жен входом 15 управления анодной группой ключей П 4, содиненным с выходом элемента 10 ЗАПРЕТ. В электроприводе исключаются перегрузки силовых ключей П 4 и размагничивание; магнита индуктора потоком якоря при торможении, снижаются потери в ключах преобразователя и потери на вихревые токи и гистерезис. 3 ил.
6 iiisU
-f
Редактор А.Долинич
Составитель К.Сон Техред В.Кадар
Заказ 7456/56Тираж 661.Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытир 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор М. Самборская
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Конев Ю.И., Розно Ю.Н | |||
| и Бочка- рев О.Е | |||
| Свойства бесколлекторного двигателя при питании его от трехфазного источнитса тока | |||
| - В кн.: Электронная техника в автоматике, вып.9, Советское радио, 1977, с | |||
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
