Изобретение относится к технике цифровой магнитной записи, а именно к устройствам автоматического позиционирования магнитных головок в дисковых накопителях.
Цель изобретения - повышение эффективности за счет обработки различных типов входных сигналов.
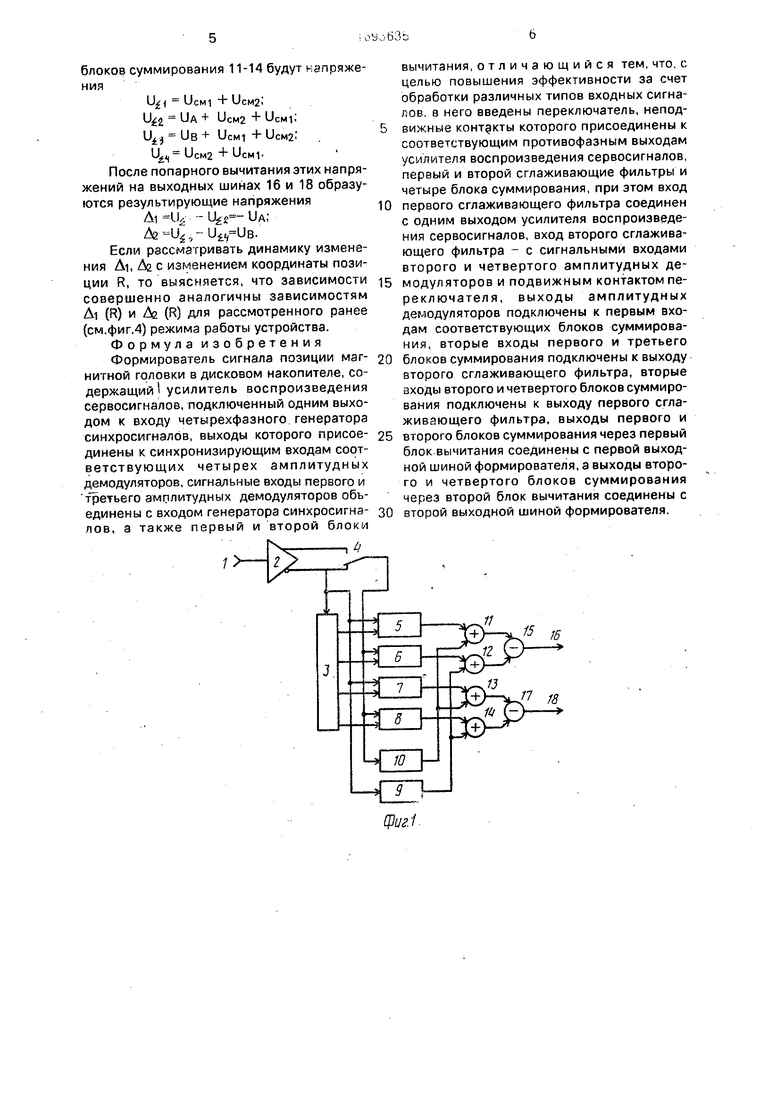
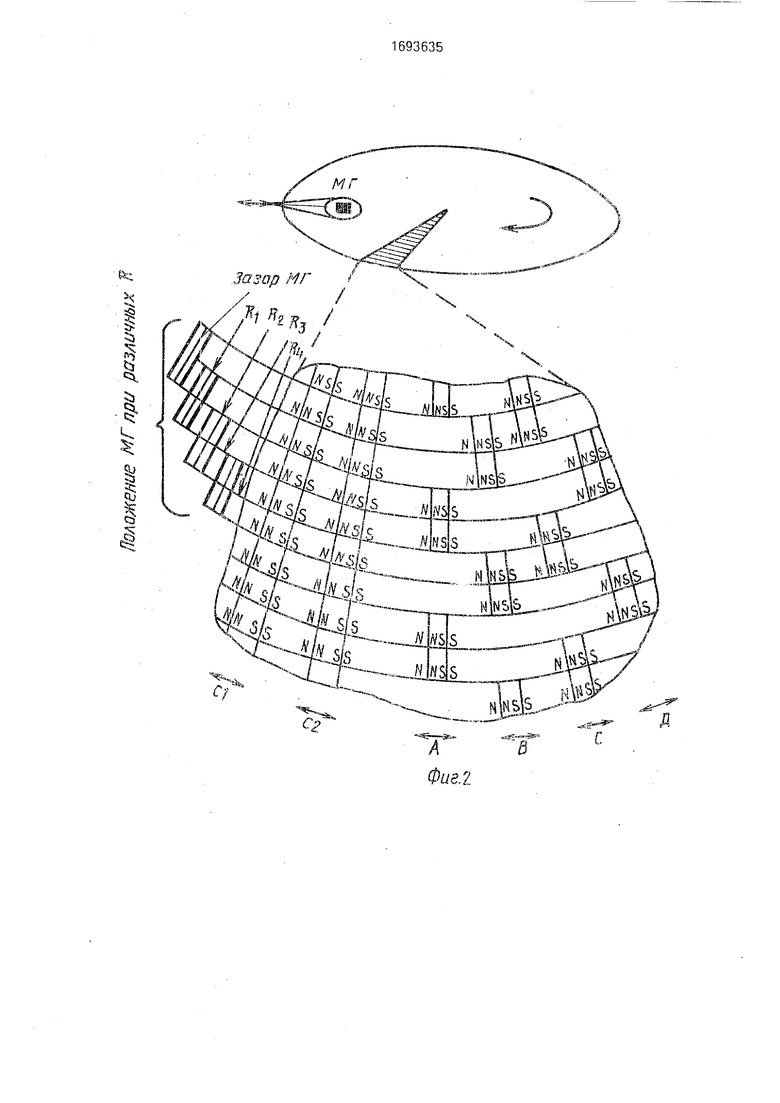
На фиг. 1 показана функциональная схема формирователя сигнала позиции магнитной головки в дисковом накопителе; на фиг.2 - взаимное расположение зазора магнитной головки и сервоповерхности диска при кодировании ее по методу, когда информация о позиции переносится амплитудами участков сервосигнала одной полярности, фиг.З -- форма воспроизведенного сервосигнала при различных положениях магнитной головки; на фиг.4 - зависимости этих сигналов от позиции магнитной головки; на фиг.5 - сервоповерхность диска при кодировании ее с двухполярным представлением информации о позиции; на фиг.6 - временные диаграммы сигналов при воспроизведении такой сервоповерхности.
Формирователь сигнала позиции магнитной головки в дисковом модуле содержит соединенный с входной шиной 1 усилитель. 2 воспроизведения сервосигна- лов, подключенный одним своим выходом к входу генератора 3 синхросигналов и первому неподвижному контакту переключателя 4, второй неподвижный контакт которого присоединен к другому выходу усилителя 2 Синхронизирующий вход каждого из амплитудных демодуляторов 5-8 соединен с соот- ветствующим выходом генератора 3
О
ю
со с ы ел
Сигнальные входы первого 5 и третьего 7 демодуляторов присоединены к первому неподвижному контакту переключателя 4 и входу сглаживающего фильтра 9, а сигнальные входы второго 6 и четвертого 8 демодуляторов- к подвижному контакту переключателя 4 и входу сглаживающего фильтра 10. Выходы демодуляторов 5-8 подключены к первым входам соответствующих блоков 11-14 суммирования, вторые входы первого 11 и третьего 13 блоков суммирования присоединены к выходу сглаживающего фильтра 10, а вторые входы второго 12 и четвертого 14 блоков суммирования соединены с выходом фильтра 9. Выходы блоков 11 и 12 суммирования через блок 15 вычитания подключены к первой выходной шине 16, а выходы блоков 13 и 14 суммирования через блок 17 вычитания к второй выходной шине 18.
Генератор 3 синхросигналов предназначен для формирования периодической последовательности синхросигналов. При изменении метода кодирования сервопо- верхности генератор 3 перестраивается на другую последовательность синхросигналов.
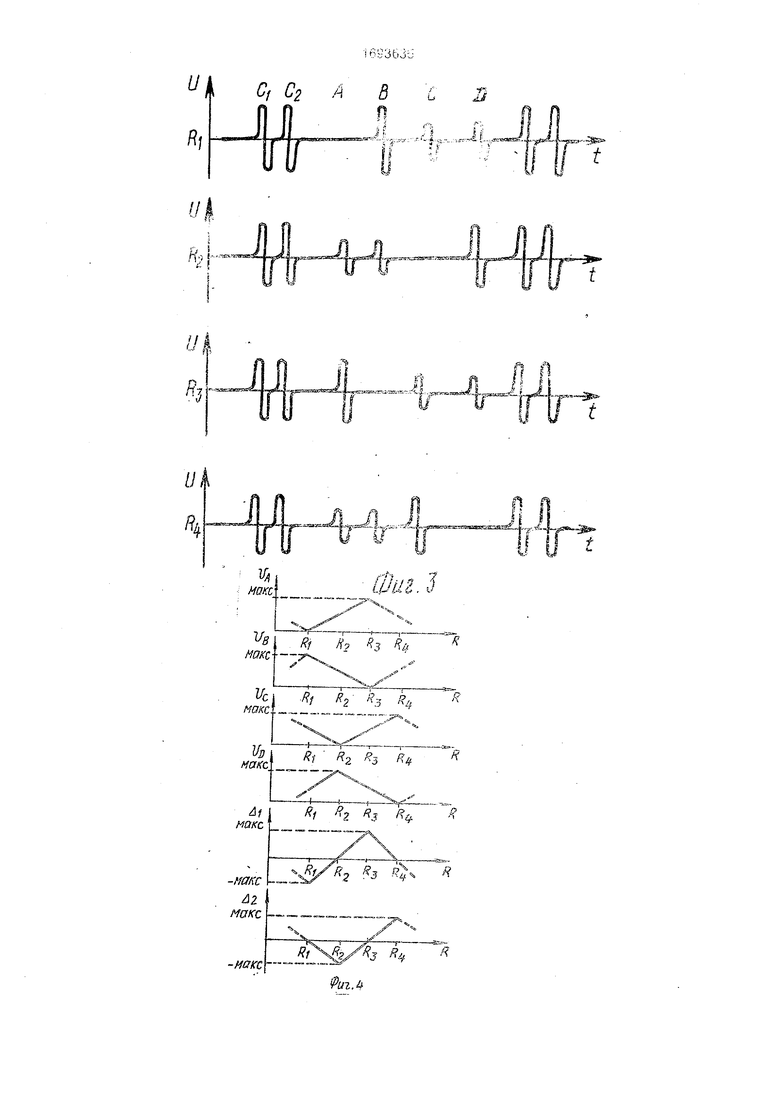
При работе с сервосигналом, в котором информация о позиции представляется амплитудами импульсов одной полярности, переключатель 4 (см.фиг. 1) устанавливается в положение, при котором сигнальные входы всех демодуляторов 5-8 и входы фильтров 9,10 оказываются подключенными к одному и тому же выходу усилителя 2. В зависимости от текущего радиуса положения магнитной головки (МГ)(см.фиг.2) Ri, Ra, Яз, RA воспроизводимый сервосигнал имеет форму, показанную на фиг.З, Соотношение между амплитудами дипульсов A,B,C,D изменяется в зависимости от поперечного пе- ремещения (радиуса) МГ. Амплитуда синхроимпульсов Ci, Са остается неизменной, интервал между ними отличается от интервалов между импульсами A,B,C,D, что позволяет надежно обнаружить их при воспроизведении.
Генератор 3 синхросигналов формирует на своих выходах четыре смещенные относительно одна другой последовательности синхросигналов длительностью, равной продолжительности зоны соответствующего позиционного импульса в сервосигнале. Период каждого синхросигнала равен периоду, повторения сервосигнала.
. В общем случае базовая линия сервосигнала может отличаться от уровня нуля на величину UCMI- В результате селективного пикового детектирования на выходах демо
дуляторов 5-8 оказываются напряжения соответственно.
UA + UCMI ; UB+ UCMI; Uc + UCMi; UD+ UCMI. Блоки суммирования 11-14 прибавляют к полученным напряжениям величину UCMI, которая образуется на выходах обоих сгла- .живающих фильтров 9 и 10. Таким образом, на выходах блоков суммирования 11-14 будут напряжения
+ 2 UCMI;
+ 2UcMi; l{,Uc + 2UcMi; + 2исм1.
После попарного вычитания полученных напряжений на выходных шинах 16, 17 образуются следующие результаты: - UB; - - UD.
Очевидно, что в рассматриваемом случае центральному положению МГ относительно дорожки соответствует равенство Uc- UD, т.е. Дг 0, По знаку и величине Д2 можно судить о направлении и величине
смещения МГ и автоматически отрегулировать ее позицию. При нахождении МГ на смежных дорожках сигналом позиции служит AL
Зависимости напряжений UA + UD результирующих сигналов позиции AI и Дг от позиции МГ, показанные на фиг.4, иллюстрируют динамику устройства при поступательном перемещении МГ поперек дорожек диска.
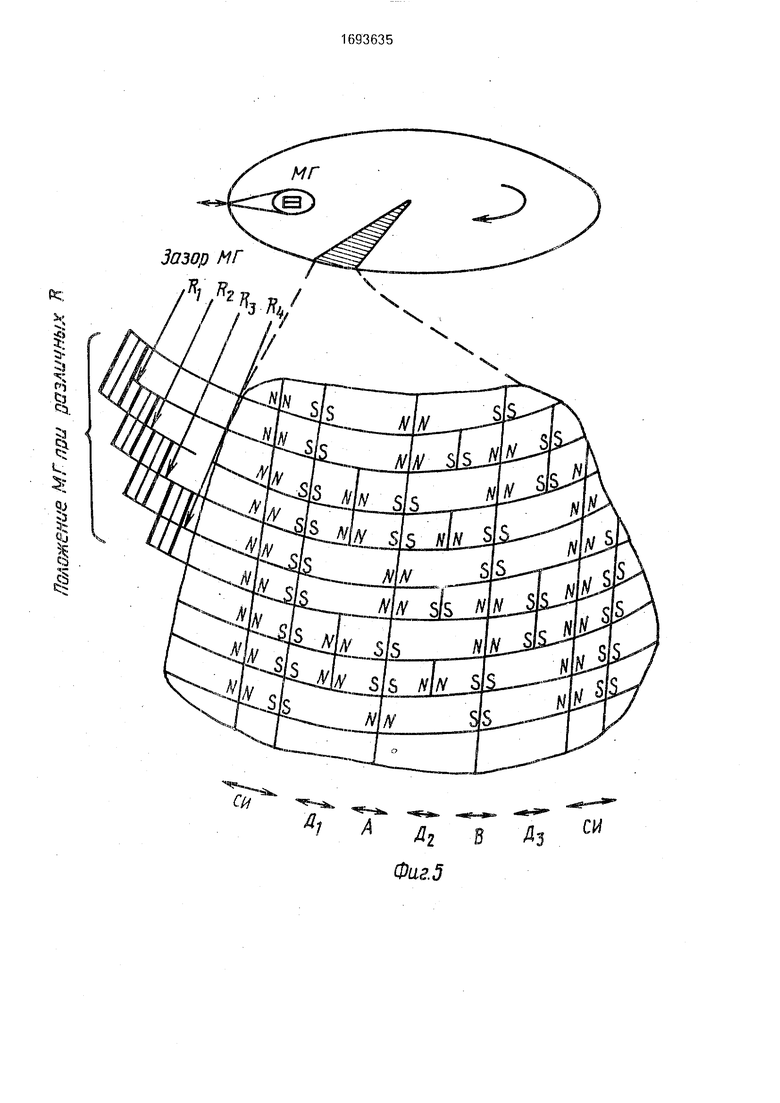
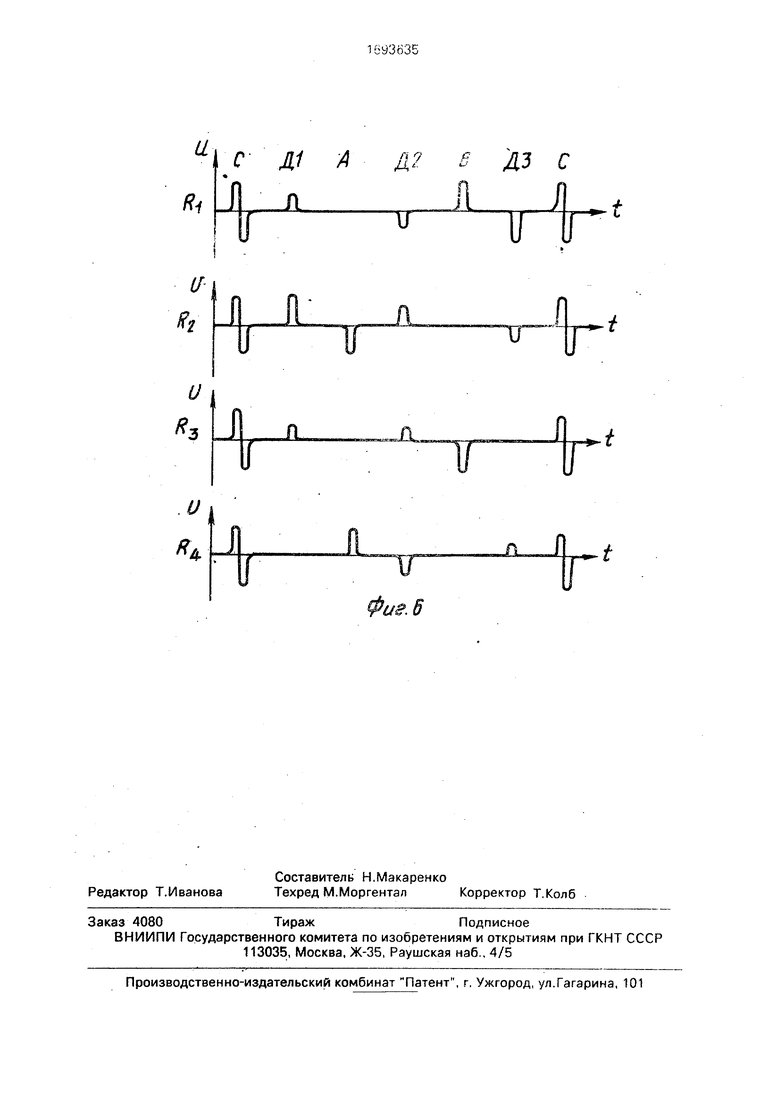
Если в дисковом накопителе, где используется предлагаемый формирователь, сервоповерхность диска размечена в соответствии с методом, при котором изменяется полярность импульсов позиции
(см.фиг.5,6), то переключатель 4 в устройстве переводится в положение, при котором подвижный его контакт замыкается вторым неподвижным контактом. Кроме того, генератор 3 синхросигналов переводится в режим, когда на его первом и втором выходах импульсов появляются одновременно в окрестностях импульсов позиции А, а на треть- ем и четвертом выходах импульсы появляются одновременно в окрестностях
импульсов позиции В.
В результате селективного амплитудного детектирования на выходах амплитудных демодуляторов 5-8 оказыва- ются напряжения соответственно UCMI, UA + + UCMI; UB + UcMi;UCM2- Поскольку на выходе сглаживающего фильтра 9 выделяется.сред- нее напряжение UCMI, a на выходе сглаживающего фильтра Ю-исллг- то на выходах
блоков суммирования 11-14 будут напряжения
UCMI + UcM2i
UA + UCM2 + UCMI;
U UB+ UCMt + UcM2; UM UCM2+UcMl.
После попарного вычитания этих напряжений на выходных шинах 16 и 18 образуются результирующие напряжения AlHU Az4Ј,.
Если рассматривать динамику изменения AI, A2 с изменением координаты позиции R, то выясняется, что зависимости совершенно аналогичны зависимостям AI (R) и Дг (R) для рассмотренного ранее (см,фиг.4) режима работы устройства.
Формула изобретения
Формирователь сигнала позиции магнитной головки в дисковом накопителе, содержащий усилитель воспроизведения сервосигналов, подключенный одним выходом к входу четырехфазного генератора синхросигналов, выходы которого присоединены к синхронизирующим входам соответствующих четырех амплитудных демодуляторов, сигнальные входы первого и третьего амплитудных демодуляторов объединены с входом генератора синхросигналов, а также первый и второй блоки
вычитания, отличающийся тем, что, с целью повышения эффективности за счет обработки различных типов входных сигналов, в него введены переключатель, непод- 5 вижные контакты которого присоединены к соответствующим противофазным выходам усилителя воспроизведения сервосигналов, первый и второй сглаживающие фильтры и четыре блока суммирования, при этом вход
0 первого сглаживающего фильтра соединен с одним выходом усилителя воспроизведения сервосигналов, вход второго сглаживающего фильтра - с сигнальными входами второго и четвертого амплитудных де5 модуляторов и подвижным контактом переключателя, выходы амплитудных демодуляторов подключены к первым входам соответствующих блоков суммирования, вторые входы первого и третьего
0 блоков суммирования подключены к выходу второго сглаживающего фильтра, вторые входы второго и четвертого блоков суммирования подключены к выходу первого сглаживающего фильтра, выходы первого и
5 второго блоков суммирования через первый блок вычитания соединены с первой выходной шиной формирователя, а выходы второго и четвертого блоков суммирования через второй блок вычитания соединены с
0 второй выходной шиной формирователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования тракта воспроизведения сервосигналов | 1984 |
|
SU1166132A1 |
| Демодулятор сервосигналов дискового модуля | 1989 |
|
SU1674243A1 |
| Устройство для записи синхросигналов на пакете магнитных дисков | 1989 |
|
SU1597928A1 |
| СИСТЕМА СТЕРЕОФОНИЧЕСКОГО ВЕЩАНИЯ | 1992 |
|
RU2040859C1 |
| Устройство для воспроизведения цифровой информации с магнитной ленты | 1985 |
|
SU1277186A1 |
| Цепь автоматической регулировки усиления канала воспроизведения сервоинформации устройства позиционирования магнитных головок | 1987 |
|
SU1478251A1 |
| НОСИТЕЛЬ ЗАПИСИ И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ НОСИТЕЛЯ ЗАПИСИ | 2002 |
|
RU2280907C2 |
| Устройство для управления положением вращающейся магнитной головки на дорожке записи | 1981 |
|
SU1338789A3 |
| Устройство для видеозаписи | 1973 |
|
SU477558A1 |
| Устройство для компенсации колебаний скорости движения магнитного носителя при записи и воспроизведении импульсно-модулированных сигналов | 1982 |
|
SU1019487A1 |
Изобретение относится к технике цифровой магнитной записи, а именно к устройствам автоматического позиционирования магнитных головок в дисковых накопителях. Изобретение позволяет расширить функциональные возможности формирователя сигнала позиции магнитной головки, обеспечив его работоспособность с различными типами сервоповерхностей в пакетах дисков. Для этого с помощью дополнительно введенных переключателя 4, фильтров 9 и 10 и блоков суммирования 11-14 в устройстве осуществляется амплитудная демодуляция импульсов обеих полярностей в циклически повторяющемся кадре серво- сигнала, считываемого магнитной головкой. 6 ил.
г
//A г
IT
%
/Vfl A C
R} R2 R, R, R
Ms
макс
R l % %
.
A1 макс
-4-,2
R2 Rs RU. %
-макс
&2
макс
Rr/Ry R3 u
-/wrc -
Й«. А
L
Л
„1;
(f
t
П
гндаютгг -эвЬя5.
-yes- ,™n,
w
-4-,2
R2 Rs R
/
К
I
5з
I
I
I
| Патент США N 4130844, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство формирования сигнала положения системы позиционирования | 1985 |
|
SU1314382A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Патент США №4238909, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
