Изобретение относится к горной промышленности и может быть использовано для дистанционного управления электровозом в местах погрузки и разгрузки руды.
Целью изобретения является повышение безопасности работы и экономии электроэнергии.
На чертеже представлена принципиальная схема устройства дистанционного управления электровозом в месте погрузки или разгрузки.
Устройство содержит переносной передатчик 1,три приемника 2.1,2.2, 2.3 высокочастотных сигналов, три селектора 3.1, 3.2, 3.3 с релейными выходами (могут быть и другие), три контактора 4.1, 4.2, 4.3, управляемых от селекторов, включающие катушки 4.1,1, 4,2,1 и 4,3.1, силовые контакты 4,1.2, 4.2.2 и 4.3.2 и блок-контакт 4.2.3, кабельную перемычку 5, соединяющую контактный (троллейный) провод, разделенный изоляторами 6.1, 6.2, 6.3, 6.4 на три участка: I - ввода электровоза на ручном управлении: II - погрузки или разгрузки (рабочий участок); III - вывода электровоза на ручном управлении, автономную тяговую подстанцию 7, выход которой через контактор 4.2 соединен с блоком 8 управления откидным фиксируемым стопором 9, установленным в месте погрузки или выгрузки.
В исходном состоянии передатчик 1 установлен на электровозе 10.
Автономная тяговая подстанция 7 может быть собрана на кремниевых выпрямителях, вход питающего трансформатора в ней включен в сеть последовательно через батарею конденсаторов.
В устройстве можно использовать откидные стопоры путевые типа СП-200-6а с гидроэлектрическим приводом ТЭГ-бООа и блоком управления стопорами.
Переносной передатчик 1 ВЧ-сигналов, приемники 2 ВЧ-сигналов, селекторы 3 с релейными выходами и контакторы 4 постоянного тока представляют собой известные устройства. Контакторы управляются выходными реле селекторов по командам машиниста с помощью каналов ВЧ-связи.
Устройство работает следующим образом.
В исходном состоянии передатчик 1 размещен на электровозе 10, который двигается к месту производства работ по погрузке или разгрузке руды, огражденному стопорами 9.
Приемники работаю з ждущем режиме. На выходах селекторов сигналов нет и контакторы обесточены. Контактный провод и кабельная перемычка 5 находятся под напряжением общешахтной сети, а участки I, I и III контактного провода обесточены,
Автономная тяговая подстанция 7 работает в режиме холостого хода, блок 8 управления стопорами обесточен и стопор 9 находится в закрытом состоянии,
При подходе электровоза 10 к участку I
машинист включает передатчик на первый ВЧ-канал. Приемник 2,1, настроенный на частоту (fi) этого канала, выдает через свой селектор 3.1 команду на включение контактора 4.1, который запитывает от общешахтной сети участок I (секцию) контактного провода. Электровоз 10 продолжает движение (на чертеже слева-направо) и проходит изоляторы 6.1 л 6,2.
При переходе на участок II после изолятора 6.2 электровоз 10 теряет питание и останав/мвзется, не доходя до стопоров 9, или под их воздействием.
Машинист электровоза, оставляя включенным в заданном направлении схему
электровоза 10, покидает кабину, беря с собой передатчик 1, переходит на рабочее место люкового или машиниста опрокида и включает передатчик на второй ВЧ-канал
(f2). .
Приемник 2.1, настроенный на первую частоту (fi), теряет входной сигнал и селектор 3,1 этого приемника через свой релейный выход выключает питание контактора 4.1 и обесточивает участок I.
0 Одновременно получает питание приемник 2.2 настроенный на второй ВЧ-канал, на селектор 3.2 поступает команда на включение контактора 4.2. При этом на участок II контактного провода от контактора 4.2 по5 дается питание от автономной тягоэой под- станции, а также включается блок в управления через контакт 4.2,3. Стопоры 9 отбрасываются и электровоз 10 начинает движение.
0Броски пускового тока и тока нагрузки
ограничены величиной предвключенной емкости автономной тяговой подстанции 7, которую, как и трансформатор подстанции 7, выбирают, исходя из параметров, применяемых на данной шахте электровозов. При правильном выборе электровоз с включенными двигателями может находиться в за- стопоренном состоянии практически неограниченное время.
Машинист, ориентируясь визуально (он находится в непосредственной близости от точки остановки),.пропускает через открыв- шийся стопор 9 электровоз 10 и первый вагон и включает второй канал ВЧ. Контактор 4.2 в цепи питания участка II троллейного провода обесточивается и одновременно накладывается стопор 9, фиксируется остановка вагона. Машинист приступает к выполнению обычных разгрузочных или погрузочных операций. После окончания операций с первым вагоном машинист вновь включает передатчик на вто- рой ВЧ-канал и вновь включается участок II от автономной подстанции, Циклы повторяют с я до окончания погрузки или разгрузки всего состава, после чего машинист возвращается в кабину, включает переносный передатчик 1 на третий ВЧ-канал и проезжает участок III контактного провода, после чего он включает передатчик 1 и выводит при ручном управлении электровоз 10 с составом на магистральный путь.
По сравнению с известным данное устройство требует значительно меньших затрат на изготовление и эксплуатацию, при этом отпадает необходимость в модернизации всего парка электровозов. Требуется также меньшее количество узлов и деталей. Повышается надежность и безопасность работы устройства, облегчается его обслуживание.
Формула изобретения Устройство дистанционного управления рудничным электровозом в месте погрузки или разгрузки, содержащее переносной передатчик высокочастотных сигналов и цепи последовательно соединенных приемников высокочастотных сигналов, селекторов с релейным выходом и катушек контакторов, отличающееся тем, что, с целью повышения безопасности работ, оно снабжено секционированными с помощью четырех изоляторов участками контактного провода, откидным фиксируемым стопором, блоком управления стопором и автономной тяговой подстанцией, при этом шунтирующие замыкающие контакты контакторов первой и третьей цепей подключены к контактному проводу параллельно соответственно первому и четвертому изоляторам, выход автономной тяговой подстанции подключен к среднему участку кон- тактного провода через первый замыкающий контакт контактора второй цепи, при этом выход селектора последней через второй замыкающий контакт контактора той же цели соединен с входом блока управления стопором, выход которого связан с приводом откидного фиксируемого стопора,
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ НА РЕМОНТНУЮ ПОЗИЦИИЮ | 2002 |
|
RU2229989C1 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ УПРАВЛЯЕМОЙ ВСТАВКИ КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА СО СЪЕЗДОМ | 2019 |
|
RU2726592C1 |
| СИСТЕМА СМЕШАННОГО ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА | 2008 |
|
RU2371332C1 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| УСТРОЙСТВО ЭЛЕКТРОСНАБЖЕНИЯ КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2404500C1 |
| КОНТАКТНАЯ СЕТЬ В ЗОНЕ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2002 |
|
RU2219078C2 |
| Устройство для автоматического включения и выключения тяговой подстанции | 1939 |
|
SU68659A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ИЗОЛЯЦИИ СИЛОВЫХ ТРАНСФОРМАТОРОВ | 2009 |
|
RU2399925C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ УЧАСТКОВ СЕКЦИОНИРОВАННОЙ КОНТАКТНОЙ ЛИНИИ | 1946 |
|
SU70030A1 |
| Устройство для обнаружения обрыва в тяговой сети | 1989 |
|
SU1783600A1 |
Изобретение относится к горной промети и предназначено для дистанционного управления рудничным электровозом (ЭВ) 10 в местах погрузки и разгрузки руды. Цель - повышение безопасности работы и экономии электроэнергии. Устр-во содержит переносной передатчик 1 высокочастотных сигналов и цепи последовательно соединенных приемников 2.1-2.3 высокочастотных сигналов, селекторов 3.1-3.3 с релейным выходом и катушек 4.1.1-4.3.1 контакторов 4.1-4.3. Дополнительно устр- во снабжено секционированными с помощью четырех изоляторов 6.1-6.4 участками I-III контактного провода, откидным фиксируемым стопором 9, блоком 8 управления стопором 9 и автономной тяговой подстанцией 7. При подходе ЭВ 10 к участку I приемник 2.1 выдает через свой селектор 3.1 команду на включение контактора 4.1, который записывает участок I контактного провода Продолжая движения, ЭВ 10. проходит изоляторы 6.1 и 6.2. Затем, переходя на участок II после изолятора 6,2 ЭВ 10, не доходя до стопоров, останавливается, и участок I обесточивается. Одновременно получает питание приемник 2,2 и через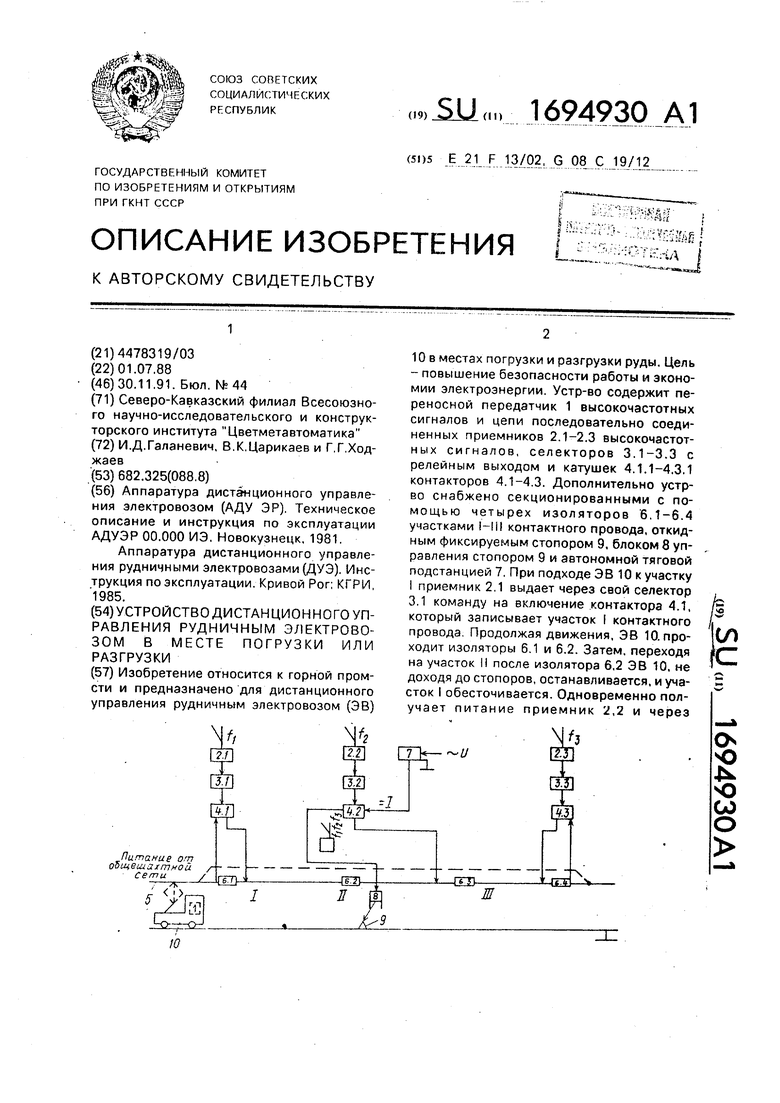
| Аппаратура дистанционного управления электровозом (АДУ ЭР) | |||
| Техническое описание и инструкция по эксплуатации АДУЭР 00.000 ИЭ | |||
| Новокузнецк, 1981 | |||
| Аппаратура дистанционного управления рудничными электровозами (ДУЭ) | |||
| Инструкция по эксплуатации | |||
| Кривой Рог; КГРИ, 1985. |
