Изобретение относится к средствам управления тяговыми электроприводами постоянного тока электровозов.
В настоящее время для тяговых электродвигателей (ТЭД) постоянного тока широкое распространение получили системы возбуждения смешанного типа, в которых обмотка возбуждения, включенная последовательно с якорем, в процессе работы ТЭД подпитывается током от внешнего источника питания (SU 381566 А1, B60L 15/08, 01.01.1973; SU 662383 A1, B60L 15/04, 15.05.1979; SU 1120473, Н02Р 5/16, 23.10.1984).
В каждой из известных систем возбуждения ТЭД указанного типа имеется контур регулирования тока якоря и контур регулирования тока возбуждения с соответствующими датчиками тока, блоками оценки измеренных величин и сопоставления с заданными, блоками управления и исполнительными органами, воздействующими на регулируемые токи.
Наиболее близким аналогом является система возбуждения смешанного типа электровоза ВЛ11 м, содержащая для каждого из двух комплектов оборудования пары тяговых электродвигателей: блок пускорегулирующей аппаратуры, вход которого через блок линейных контакторов подключен к токоприемнику, связанному с контактной сетью, а выход через датчик тока якоря подключен к последовательно соединенным якорям тяговых электродвигателей, датчик тока возбуждения, вход которого подключен к выходу обмоток возбуждения, а выход - к рельсовой цепи (Э.С.Вохмянин, В.Ю.Чумаков. Электрические схемы электровозов ВЛ11, ВЛ11М. - М.: ИКЦ «Академкнига», 2003 г. рис.2.4 вкладки).
Однако известные системы не предназначены для повышения тяговых свойств локомотива и предотвращения боксования.
Задачей изобретения является повышение тяговых свойств и уменьшение склонности к боксованию электровоза за счет применения системы смешанного возбуждения ТЭД с достижением технического результата, охватывающего:
полное использование номинальной мощности электровоза в наиболее широком диапазоне скоростей движения и с высоким коэффициентом полезного действия;
способность развивать наибольший вращающий момент при трогании с места с наименьшими потерями энергии в пусковых сопротивлениях;
автоматический переход из тягового режима в тормозной и обратно без разрыва электрических цепей ТЭД;
высокую степень противобоксовочной способности;
широкую регулировочную способность и возможность автоматизации управления электровозом.
Для решения поставленной задачи предложена система смешанного возбуждения ТЭД электровоза, содержащая
два одинаковых комплекта оборудования пары тяговых электродвигателей, каждый из которых состоит из:
блока пускорегулирующей аппаратуры, вход которого через блок линейных контакторов подключен к токоприемнику, связанному с контактной сетью,
датчика тока якоря, вход которого подключен к выходу блока пускорегулирующей аппаратуры, а выход соединен с входом последовательно соединенных якорей,
сумматора токов, первый вход которого подключен к выходу последовательно соединенных якорей, второй вход соединен с выходом контактора выходного подвозбуждения, а выход подключен к входу обмоток возбуждения, датчика тока возбуждения, вход которого подключен к выходу обмоток возбуждения, а выход соединен с рельсовой цепью,
источника питания подвозбуждения, силовой выход которого соединен с рельсовой цепью,
контактора выходного подвозбуждения, вход которого соединен с управляющим выходом источника питания подвозбуждения,
двух датчиков вращения якоря, входы которых подключены к соответствующим якорям тяговых электродвигателей,
также содержащая
пульт управления с блоком командоаппаратов, первая группа выходов которого подключена к управляющим входам токоприемника, блока линейных контакторов, контактора питания подвозбуждения и контакторов выходных подвозбуждения, вторая группа выходов подключена к управляющим входам анализаторов вращения и блока задания ограничений токов, входящего в состав пульта управления, третья группа выходов подключена к входам блока задания позиций тока якоря и блока задания позиций тока возбуждения, которые также входят в состав пульта управления,
контактор питания подвозбуждения, включенный между токоприемником и источниками питания подвозбуждения,
два идентичных по схеме анализатора вращения, состоящих из
двух групп последовательно включенных измерителей:
измерителя угловой скорости вращения якоря ТЭД, вход которого является измерительным входом анализатора вращения,
измерителя углового ускорения вращения якоря ТЭД и
измерителя производной углового ускорения вращения якоря ТЭД,
трех сумматоров сигналов,
трех блоков сравнения,
элемента ИЛИ, выход которого является выходом анализатора вращения,
блока задания ограничений параметров вращения якоря ТЭД, вход которого является управляющим входом анализатора вращения,
причем прямой и инверсный входы первого, второго и третьего сумматоров сигналов подключены к выходам соответственно измерителей угловой скорости вращения якоря ТЭД, измерителей углового ускорения вращения якоря ТЭД и измерителей производной углового ускорения вращения якоря ТЭД первой и второй групп, первые входы блоков сравнения подключены к выходу блока задания ограничений параметров вращения, вторые входы - к выходу соответствующего сумматора сигналов, а выходы - к входам элемента ИЛИ,
при этом первый измерительный вход первого анализатора вращения соединен с выходом датчика вращения якоря первого ТЭД первого комплекта оборудования, второй измерительный вход первого анализатора вращения соединен с выходом датчика вращения якоря второго ТЭД второго комплекта оборудования, первый измерительный вход второго анализатора вращения соединен с выходом датчика вращения якоря второго ТЭД первого комплекта оборудования, второй измерительный вход второго анализатора вращения соединен с выходом датчика вращения якоря первого ТЭД второго комплекта оборудования, а выходы обоих анализаторов вращения соединены с входами логического элемента «ИЛИ»,
а также содержащая два идентичных по схеме регулятора токов, каждый из которых управляет токами якоря и подвозбуждения пары тяговых электродвигателей своего комплекта оборудования, при этом первый измерительный вход обоих регуляторов токов подключен к выходу логического элемента «ИЛИ», второй и третий измерительные входы подключены соответственно к выходу датчика тока якоря и выходу датчика тока возбуждения тяговых электродвигателей своего комплекта оборудования, первая группа управляющих входов - к выходу блока задания ограничений токов пульта управления, второй и третий управляющие входы - к выходам соответственно, блока задания позиций тока якоря и блока задания позиций тока возбуждения пульта управления, а первый и второй выходы - к управляющим входам соответственно блока пускорегулирующей аппаратуры и источника питания подвозбуждения своего комплекта оборудования,
каждый регулятор токов включает в себя
два блока сравнения,
элемент ИЛИ,
контроллер тока якоря,
блокиратор и
контроллер тока возбуждения,
причем соединенные друг с другом первый вход элемента ИЛИ и вторые входы блокиратора и контроллера тока возбуждения образуют первый измерительный вход регулятора тока, вторые входы первого и второго блоков сравнения образуют соответственно второй и третий измерительный вход регулятора токов, соединенные друг с другом первые входы блоков сравнения образуют первую группу управляющих входов регулятора токов, а первый вход контроллера тока якоря и первый вход блокиратора образуют соответственно второй и третий управляющие входы регулятора токов, второй вход элемента ИЛИ подключен к выходу первого блока сравнения, второй вход контроллера тока якоря соединен с выходом элемента ИЛИ, а первый и третий входы контроллера тока возбуждения подключены к выходам соответственно блокиратора и второго блока сравнения.
Изобретение поясняется чертежами.
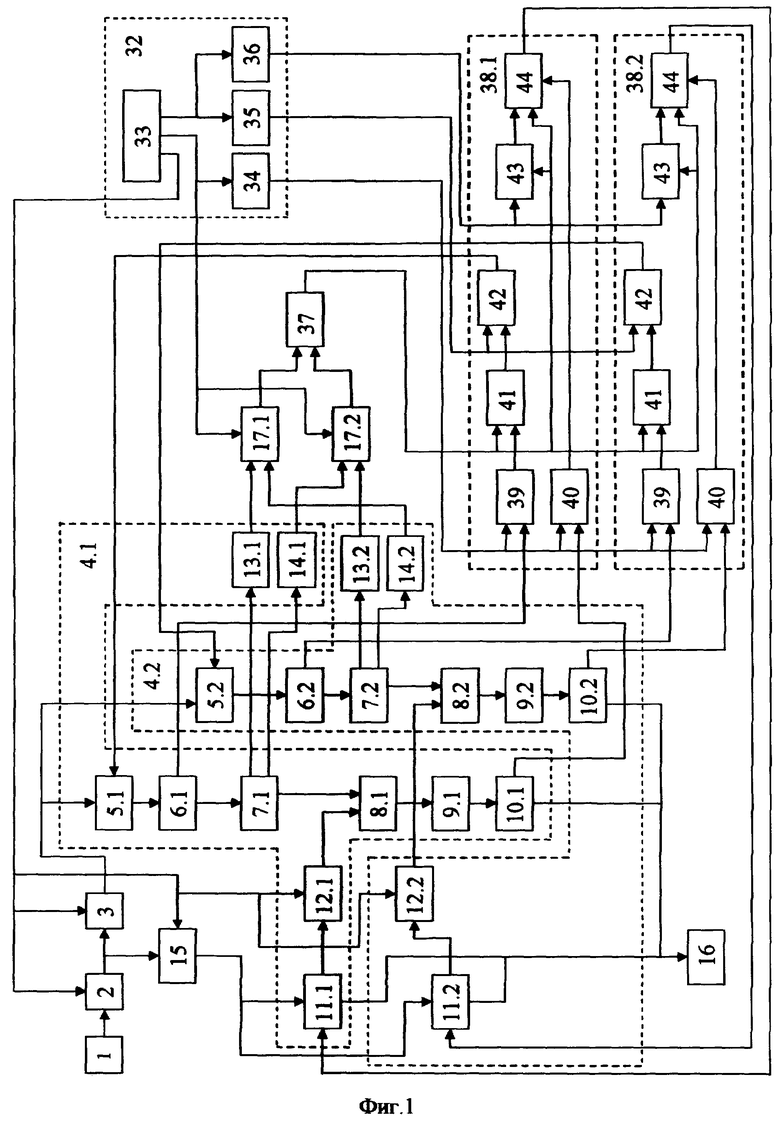
Фиг.1 - блок-схема системы смешанного возбуждения тяговых двигателей электровоза.
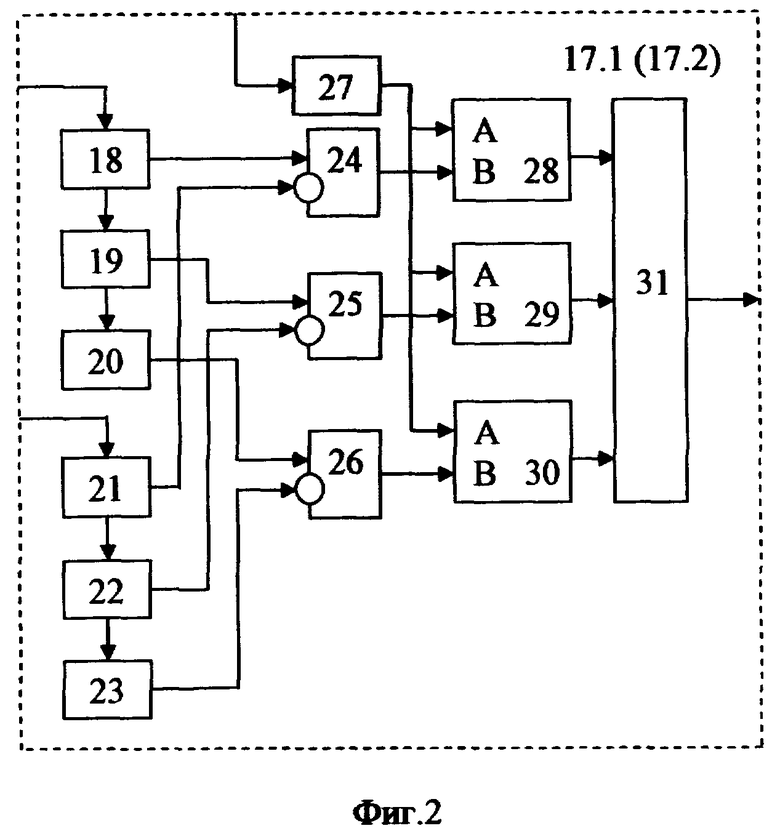
Фиг.2. - блок-схема анализатора вращения якорей тяговых двигателей (поз.17.1, 17.2 фиг.1).
На схеме (Фиг.1) обозначены: контактная сеть 1, токоприемник 2, блок 3 линейных контакторов, комплект 4.1 оборудования пары тяговых электродвигателей, в который входят: блок 5.1 пускорегулирующей аппаратуры, датчик 6.1 тока якоря, последовательно соединенные якоря 7.1, сумматор 8.1 токов, обмотки 9.1 возбуждения, датчик 10.1 тока возбуждения, источник 11.1 питания подвозбуждения, контактор выходной 12.1 подвозбуждения, датчик 13.1 вращения первого тягового двигателя, датчик 14.1 вращения второго тягового двигателя, комплект 4.2 оборудования пары тяговых электродвигателей, в который входят: блок 5.2 пускорегулирующей аппаратуры, датчик 6.2 тока якоря, два последовательно соединенных якоря 7.2, сумматор 8.2 токов, обмотки 9.2 возбуждения, датчик 10.2 тока возбуждения, источник 11.2 питания подвозбуждения, контактор выходной 12.2 подвозбуждения, датчик 13.2 вращения якоря первого тягового двигателя, датчик 14.2 вращения якоря второго тягового двигателя, общие для обоих комплектов оборудования: контактор 15 питания подвозбуждения, рельсовая цепь 16, анализаторы 17.1 и 17.2 вращения, в каждый из которых входят два измерителя 18 и 21 угловой скорости якоря ТЭД, два измерителя 19 и 22 углового ускорения якоря ТЭД, два измерителя 20 и 23 производной углового ускорения якоря ТЭД, причем измерители 18-20 образуют канал измерения, связанный с первым измерительным входом анализатора вращения, а измерители 21-23 образуют канал измерения, связанный со вторым измерительным входом анализатора вращения, первый сумматор 24 сигналов, второй сумматор 25 сигналов, третий сумматор 26 сигналов, блок 27 задания ограничений параметров вращения, первый блок 28 сравнения (А≥В), второй блок 29 сравнения (А≥В), третий блок 30 сравнения (А≥В) и элемент 31 ИЛИ, пульт 32 управления, в который входят блок 33 командоаппаратов, блок 34 задания ограничений токов, блок 35 задания позиций тока якоря и блок 36 задания позиций тока возбуждения, регуляторы 38.1 и 38.2 токов, в каждый из которых входят: первый блок 39 сравнения (тока якоря со значением ограничения), второй блок 40 сравнения (тока возбуждения со значением ограничения), элемент 41 ИЛИ, контроллер 42 тока якоря, блокиратор 43 позиций тока возбуждения, контроллер 44 тока возбуждения.
Входы блоков 5.1 и 5.2 пускорегулирующей аппаратуры через блок 3 линейных контакторов подключены к связанному с контактной сетью 1 токоприемнику 2, а выходы - через датчики 6.1 и 6.2 тока якоря соответственно к последовательно соединенным якорям 7.1 и 7.2.
Один из входов сумматоров 8.1 и 8.2 токов включен в цепь соответственно последовательно включенных якорей 7.1 и 7.2, другой вход соответственно через контактор выходной 12.1 и 12.2 подвозбуждения соединен соответственно с источником 11.1 и 11.2 питания подвозбуждения, а выход подключен соответственно к обмотке 9.1 и 9.2 возбуждения.
Первая группа выходов блока 33 командоаппаратов пульта 32 управления подключена к управляющим входам токоприемника 2, блока 3 линейных контакторов, контактора 15 питания подвозбуждения и контакторов выходных 12.1 и 12.2 подвозбуждения, вторая группа выходов подключена к управляющим входам анализаторов 17.1 и 17.2 вращения и блока 34 задания ограничений токов, третья группа выходов - к входам блока 35 задания позиций тока якоря и блока 36 задания позиций тока возбуждения.
Контактор 15 питания подвозбуждения включен между токоприемником 2 и источниками 11.1 и 11.2 питания подвозбуждения.
Первые измерительные входы регуляторов 38.1 и 38.2 токов подключены к выходу элемента 37 ИЛИ, первые группы управляющих входов - к выходу блока 34 задания ограничений токов, вторые и третьи управляющие входы - к выходам соответственно блока 35 задания позиций тока якоря и блока 36 задания позиций тока возбуждения пульта управления. Вторые и третьи измерительные входы регуляторов 38.1 и 38.2 токов подключены к выходам соответственно датчиков 6.1 и 6.2 тока якоря и датчиков 10.1 и 10.2 тока возбуждения ТЭД, а первые и вторые выходы - к управляющим входам соответственно блоков пускорегулирующей аппаратуры 5.1 и 5.2 и источников питания подвозбуждения 11.1 и 11.2 соответствующих комплектов оборудования 4.1 и 4.2 тяговых электродвигателей.
Группа измерительных входов анализатора 17.1 вращения соединена с выходами датчиков 13.1 и 14.2 вращения ТЭД. Группа измерительных входов анализатора 17.2 вращения соединена с выходами датчиков 14.1 и 13.2 вращения ТЭД.
В каждом из анализаторов 17.1 и 17.2 вращения (см. фиг.2) последовательно включены: измеритель 18 угловой скорости вращения якоря ТЭД, вход которого является первым измерительным входом анализатора вращения, измеритель 19 углового ускорения вращения якоря ТЭД и измеритель 20 производной углового ускорения вращения якоря ТЭД, а также последовательно включены измеритель 21 угловой скорости вращения якоря ТЭД, вход которого является вторым измерительным входом анализатора вращения, измеритель 22 углового ускорения вращения якоря ТЭД и измеритель 23 производной углового ускорения вращения якоря ТЭД. Выход элемента 31 ИЛИ является выходом анализатора вращения 17.1 (17.2). Вход блока 27 задания ограничений параметров является управляющим входом анализатора вращения 17.1 (17.2).
Прямой и инверсный входы сумматоров 24-26 сигналов подключены к выходам соответственно измерителей 18 и 21 угловой скорости, измерителей 19 и 22 углового ускорения и измерителей 20 и 23 производной углового ускорения вращения якоря ТЭД. Первые входы блоков 28-30 сравнения подключены к выходу блока 27 задания ограничений параметров, вторые входы - к выходу соответствующего сумматора сигналов 24-26, а выходы - к входам элемента 31 ИЛИ.
В регуляторе 38.1 (38.2) токов соединенные друг с другом первый вход элемента 41 ИЛИ, вторые входы блокиратора 43 и контроллера 44 тока возбуждения образуют первый измерительный вход регулятора 38.1 (38.2) токов. Вторые входы блоков 39 и 40 сравнения образуют соответственно второй и третий измерительные входы регулятора 38.1 (38.2) токов. Соединенные друг с другом первые входы блоков 39 и 40 сравнения образуют первую группу управляющих входов регулятора 38.1 (38.2) токов, первый вход контроллера 42 тока якоря и первый вход блокиратора 43 образуют соответственно второй и третий управляющие входы регулятора 38.1 (38.2) токов. Второй вход элемента 41 ИЛИ подключен к выходу блока 39 сравнения. Второй вход контроллера 42 тока якоря соединен с выходом элемента 41 ИЛИ. Первый и третий входы контроллера 44 тока возбуждения подключены к выходам соответственно блокиратора 43 и блока 40 сравнения.
Работает система следующим образом.
Контактная сеть 1 и рельсовая цепь 16 предназначены для передачи тока от тяговой подстанции на силовую схему электровоза.
Токоприемник 2 предназначен для подключения силовой схемы электровоза к контактной сети 1 по команде от блока 33 командоаппаратов пульта 32 управления.
Блок 3 линейных контакторов по команде от блока 33 командоаппаратов пульта 32 управления подключает силовую схему электровоза к токоприемнику 2.
Далее, для комплекта 4.1 оборудования пары тяговых электродвигателей (состав и назначение узлов комплекта 4.2 оборудования аналогичны).
Блок 5.1 пускорегулирующей аппаратуры путем изменения напряжения обеспечивает возможность регулирования тока в цепи последовательно соединенных якорей 7.1 ТЭД по команде контроллера 42 тока якоря с целью изменения тяговых характеристик электровоза.
В качестве пускорегулирующей аппаратуры в блоках 5.1 и 5.2 используется блок пусковых резисторов и реостатных контакторов.
Датчик 6.1 тока якоря предназначен для измерения тока в цепи последовательно соединенных якорей 7.1 ТЭД.
Сумматор 8.1 токов обеспечивает питание обмоток 9.1 возбуждения ТЭД суммарным током - током якоря и током подвозбуждения.
Датчик 10.1 тока возбуждения предназначен для измерения тока в цепи обмоток 9.1 возбуждения ТЭД.
Контактор 15 питания подвозбуждения по команде от блока 33 командоаппаратов пульта 32 управления подключает напряжение контактной сети 1 к источнику 11.1 питания подвозбуждения. Выходное напряжение источника 11.1 питания подвозбуждения регулируется контроллером 44 тока возбуждения.
В качестве источников 11.1 и 11.2 питания подвозбуждения могут быть использованы электромашинные генераторы или статические преобразователи.
Контактор выходной 12.1 подвозбуждения по команде от блока 33 командоаппаратов пульта 32 управления подключает источник 11.1 питания подвозбуждения к сумматору 8.1 токов, что позволяет оперативно переводить силовую схему из режима последовательного возбуждения в режим смешанного возбуждения и обратно.
Датчики 13.1 и 14.1 вращения якорей ТЭД измеряют угловые перемещения якорей соответственно первого и второго двигателей из пары 7.1 для оценки в анализаторах 17.1 и 17.2 вращения угловой скорости, углового ускорения и производной углового ускорения (проскальзывания колеса).
В анализаторе 17.1 на фиг.2:
- измерительные элементы 18 и 21 измеряют угловую скорость якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования соответственно;
- измерительные элементы 19 и 22 измеряют угловое ускорение якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования соответственно;
- измерительные элементы 20 и 23 измеряют производную углового ускорения (проскальзывание) якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования соответственно.
Сумматор 24 определяет разность угловых скоростей якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования.
Сумматор 25 определяет разность угловых ускорений якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования.
Сумматор 26 определяет разность производных угловых ускорений якорей первого ТЭД комплекта 4.1 оборудования и второго ТЭД комплекта 4.2 оборудования.
В анализаторе 17.2 на фиг.2:
- измерительные элементы 18 и 21 измеряют угловую скорость якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2 оборудования соответственно;
- измерительные элементы 19 и 22 измеряют угловое ускорение якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2 оборудования соответственно;
- измерительные элементы 20 и 23 измеряют производную углового ускорения (проскальзывание) якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2 оборудования соответственно.
Сумматор 24 определяет разность угловых скоростей якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2 оборудования.
Сумматор 25 определяет разность угловых ускорений якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2. оборудования.
Сумматор 26 определяет разность производных угловых ускорений якорей второго ТЭД комплекта 4.1 оборудования и первого ТЭД комплекта 4.2 оборудования.
На выходе блока 28 сравнения появляется сигнал, когда измеренная разница угловых скоростей вращения якорей станет выше установленного значения ограничения, которое вырабатывается блоком 27 задания ограничений параметров вращения.
На выходе блока 29 сравнения появляется сигнал, когда измеренная разница угловых ускорений вращения якорей станет выше установленного значения ограничения, которое вырабатывается блоком 27 задания ограничений параметров вращения.
На выходе блока 30 сравнения появляется сигнал, когда измеренная разница производных угловых ускорений вращения якорей станет выше установленного значения ограничения, которое вырабатывается блоком 27 задания ограничений параметров вращения.
Значения ограничений, вырабатываемых блоком 27 задания ограничений параметров вращения могут изменяться под воздействием блока 33 командоаппаратов пульта 32 управления.
Сигнал с выходов блоков 28-30 сравнения, проходя через элемент 31 ИЛИ, поступает на вход элемента 37 ИЛИ и далее в регуляторы 38.1 и 38.2 токов.
Наличие сигнала на выходе элемента 37 ИЛИ указывает на начало процесса боксования какой-либо колесной пары.
Блок 34 задания ограничений токов с учетом состояния блока 33 командоаппаратов пульта 32 управления вырабатывает значение ограничения тока якоря и тока возбуждения.
Регулятор 38.1 получает сигналы от датчиков 6.1 тока якоря и 10.1 тока возбуждения и управляет работой комплекта 4.1 оборудования пары тяговых электродвигателей.
Регулятор 38.2 получает сигналы от датчиков 6.2 тока якоря и 10.2 тока возбуждения и управляет работой комплекта 4.2 оборудования пары тяговых электродвигателей.
Далее рассматривается работа регулятора 38.1, т.к. работа регулятора 38.2 аналогична.
Блок 39 сравнения регулятора 38.1 токов сравнивает сигналы от датчика 6.1 тока якоря ТЭД со значением ограничения тока якоря, переданного от блока задания ограничений 34 токов.
На выходе блока 39 сравнения появляется сигнал, когда значение параметра, переданное от датчика 6.1 тока якоря ТЭД больше или равно значению ограничения.
Сигнал боксования с выхода элемента 37 ИЛИ и сигнал превышения ограничения тока якоря с выхода блока 39 сравнения поступают на входы элемента 41 ИЛИ.
Блок 35 задания позиции тока якоря с учетом состояния блока 33 командоаппаратов пульта 32 управления вырабатывает значение заданной позиции тока якоря, которое передается на контроллер 42, управляющий током якоря ТЭД путем воздействия на блок 5.1 пускорегулирующей аппаратуры.
При наличии сигнала ограничения, поступающего с выхода элемента 41 ИЛИ, команда на увеличение тока якоря от контроллера 42 блокируется.
Блок 40 сравнения сравнивает сигналы от датчика 10.1 тока возбуждения ТЭД со значением ограничения тока возбуждения, переданного от блока 34 задания ограничений токов.
На выходе блока 40 сравнения появляется сигнал, когда значение параметра, переданное от датчика 10.1 тока возбуждения ТЭД больше или равно значению ограничения.
Блок 35 задания позиции тока возбуждения с учетом состояния блока 33 командоаппаратов пульта 32 управления вырабатывает заданное значение позиции тока возбуждения, которое через блокиратор 43 передается на контроллер 44, управляющий током возбуждения ТЭД путем воздействия на источник 11.1 питания подвозбуждения.
Под воздействием сигнала боксования, поступающего с выхода элемента 37 ИЛИ, блокиратор 43 отключает сигнал блока 35 задания позиции тока возбуждения и контроллер 44 вырабатывает сигнал постепенного увеличения тока возбуждения до момента прекращения сигнала боксования.
При наличии сигнала ограничения, поступающего с выхода блока 40 сравнения, команда на увеличение тока возбуждения от контроллера 44 блокируется.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКТНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406623C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ СОЧЛЕНЕННЫМИ ЛОКОМОТИВАМИ | 2006 |
|
RU2309856C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА (ЭСУТ) | 2008 |
|
RU2386551C1 |
| Устройство для управления сочлененными локомотивами | 1988 |
|
SU1546308A1 |
| Устройство для управления сочлененными локомотивами | 1986 |
|
SU1342769A1 |
| Устройство для интервального регулирования движения поездов | 1988 |
|
SU1630945A1 |
| Устройство для управления сочлененными локомотивами | 1987 |
|
SU1417934A1 |
| Устройство для управления сочлененными локомотивами | 1986 |
|
SU1402455A1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2349981C2 |
Изобретение относится к средствам управления тяговыми электроприводами постоянного тока электровозов. Устройство содержит блок пускорегулирующей аппаратуры, источник питания подвозбуждения, контактор питания подвозбуждения, контактор выходного подвозбуждения, два датчика вращения якоря, сумматор токов, блок командоаппаратов, блок задания ограничений токов, блок задания позиций тока якоря, блок задания позиций тока возбуждения, два анализатора вращения якорей тяговых электродвигателей, два блока сравнения, элемент ИЛИ, блокиратор, контроллер тока якоря и контроллер тока возбуждения. Технический результат заключается в повышении тяговых свойств электровоза. 2 ил.
Система смешанного возбуждения тяговых электродвигателей электровоза, содержащая для каждого из двух комплектов оборудования пары тяговых электродвигателей: блок пускорегулирующей аппаратуры, вход которого через блок линейных контакторов подключен к токоприемнику, связанному с контактной сетью, а выход через датчик тока якоря подключен к последовательно соединенным якорям тяговых электродвигателей, датчик тока возбуждения, вход которого подключен к выходу обмоток возбуждения, а выход - к рельсовой цепи, отличающаяся тем, что, с целью повышения тяговых свойств электровоза, она снабжена для каждого из двух комплектов оборудования пары тяговых электродвигателей: источником питания подвозбуждения, силовой вход которого подключен через контактор питания подвозбуждения к токоприемнику, силовой выход связан с рельсовой цепью, а управляющий выход подключен к соответствующему контактору подвозбуждения, сумматором токов, один из входов которого соединен с выходом последовательно соединенных якорей, другой вход соединен с выходом контактора подвозбуждения, а выход подключен к входу обмоток возбуждения, двумя датчиками вращения якоря, связанными каждый со своим якорем, а также общими для обоих комплектов оборудования пары тяговых электродвигателей: пультом управления с блоком командоаппаратов, первая группа выходов которого подключена к управляющим входам токоприемника, блока линейных контакторов, контактора питания подвозбуждения и контакторов выходных подвозбуждения, вторая группа выходов подключена к управляющему входу блока задания ограничений токов, входящего в состав пульта управления, третья группа выходов подключена к входам блока задания позиций тока якоря и блока задания позиций тока возбуждения, которые также входят в состав пульта управления, двумя идентичными анализаторами вращения якорей тяговых электродвигателей, управляющие входы которых соединены со второй группой выходов блока командоаппаратов пульта управления, двумя идентичными регуляторами токов, первые измерительные входы которых через элемент ИЛИ подключены к выходам анализаторов вращения якорей тяговых электродвигателей, первые группы управляющих входов - к выходу блока задания ограничений токов, вторые и третьи управляющие входы - соответственно к выходам блока задания позиций тока якоря и блока задания позиций тока возбуждения пульта управления, при этом первый измерительный вход первого анализатора вращения соединен с выходом датчика вращения якоря первого тягового электродвигателя первого комплекта оборудования, второй измерительный вход первого анализатора вращения соединен с выходом датчика вращения якоря второго тягового электродвигателя второго комплекта оборудования, первый измерительный вход второго анализатора вращения соединен с выходом датчика вращения якоря второго тягового электродвигателя первого комплекта оборудования, второй измерительный вход второго анализатора вращения соединен с выходом датчика вращения якоря первого тягового электродвигателя второго комплекта оборудования, второй и третий измерительные входы регуляторов токов подключены к выходам соответственно датчиков тока якоря и датчиков тока возбуждения тяговых электродвигателей соответствующего комплекта оборудования, а первые и вторые выходы - к управляющим входам соответственно блока пускорегулирующей аппаратуры и источника питания подвозбуждения тяговых электродвигателей соответствующего комплекта оборудования, при этом каждый из двух анализаторов вращения якорей тяговых электродвигателей включает в себя: для каждого измерительного входа последовательно включенные измеритель угловой скорости, вход которого является измерительным входом анализатора вращения, измеритель углового ускорения и измеритель производной углового ускорения, а также общие для обоих измерительных входов: три сумматора сигналов, три блока сравнения, элемент ИЛИ, выход которого является выходом анализатора вращения якорей тяговых электродвигателей, блок задания ограничений параметров вращения, вход которого является управляющим входом анализатора вращения якорей тяговых электродвигателей, причем прямой и инверсный входы первого, второго и третьего сумматоров сигналов подключены к выходам соответственно измерителей угловой скорости, измерителей углового ускорения и измерителей производной углового ускорения первого и второго измерительных входов, первые входы блоков сравнения подключены к выходу блока задания ограничений параметров вращения, вторые входы - к выходу соответствующего сумматора сигналов, а выходы - к входам элемента ИЛИ, двумя идентичными регуляторами токов, каждый из которых управляет своим комплектом оборудования тяговых электродвигателей и включает в себя: два блока сравнения, элемент ИЛИ, блокиратор, контроллер тока якоря и контроллер тока возбуждения, причем соединенные друг с другом первый вход элемента ИЛИ и вторые входы блокиратора и контроллера тока возбуждения образуют первый измерительный вход регулятора тока, вторые входы первого и второго блоков сравнения образуют соответственно второй и третий измерительные входы регулятора токов, соединенные друг с другом первые входы блоков сравнения, первый вход контроллера тока якоря и первый вход блокиратора образуют соответственно первый, второй и третий управляющие входы регулятора токов, а выход контроллера тока якоря и выход контроллера тока возбуждения образуют соответственно первый и второй выходы регулятора токов, второй вход элемента ИЛИ подключен к выходу первого блока сравнения, второй вход контроллера тока якоря соединен с выходом элемента ИЛИ, а первый и третий входы контроллера тока возбуждения подключены к выходам соответственно блокиратора и второго блока сравнения.
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
| УСТРОЙСТВО ДЛЯ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 0 |
|
SU218953A1 |
| Устройство для регулирования скорости тягового электродвигателя постоянного тока | 1977 |
|
SU662383A1 |
| Диспергатор-смеситель | 1988 |
|
SU1563987A1 |

