Изобретение относится к телемеханике и может быть использовано для передачи и приема команд телеуправления рассредоточенными объектами по физической линии связи произвольной конфигурации.
Цель изобретения - повышение информативности системы.
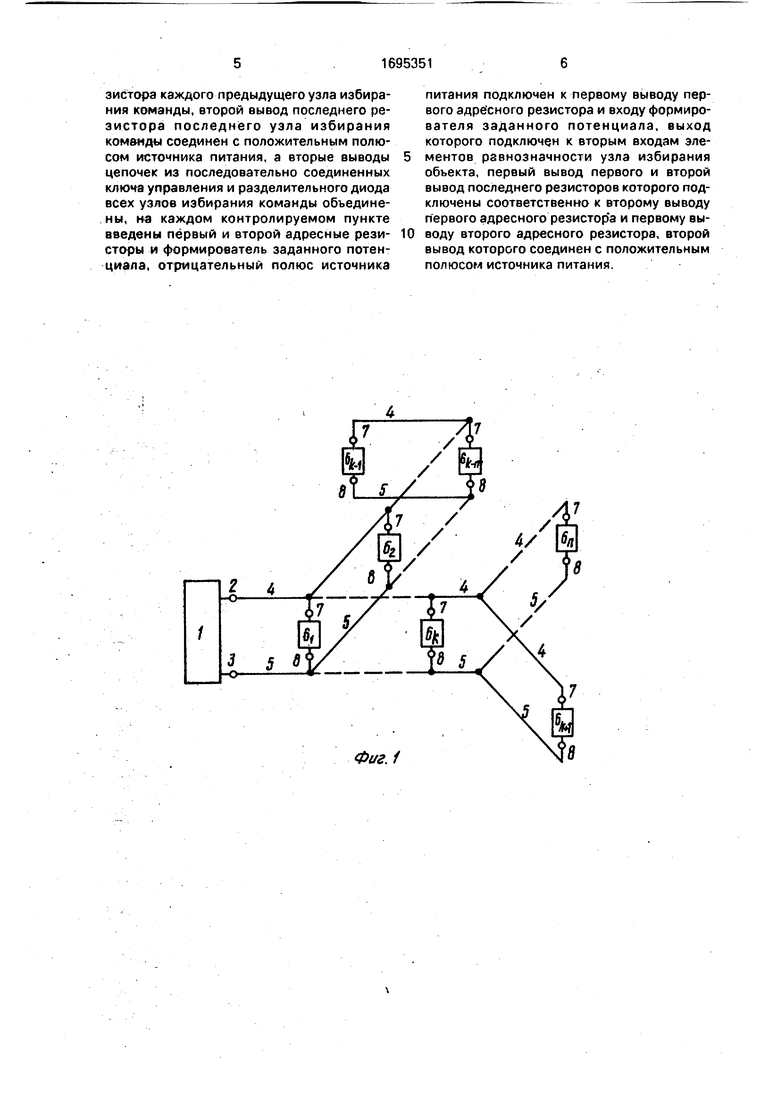
На фиг. 1 представлена блок-схема системы; на фиг. 2 - функциональная схема диспетчерского пункта (ДП); на фиг. 3 - функциональная схема контролируемого пункта (КП).
Система (фиг. 1) содержит ДП 1 с выходами 2 и 3, провода 4 и 5 физической линии связи КП 6i-6n с входами 7 и 8.
ДП 1 (фиг. 2) содержит узлы 9i-9n избирания команды по числу подключенных КП, каждый из которых включает в себя последовательно соединенные резисторы 10k.i- lOk.mk по числу объектов управления и цепочки из последовательно соединенных ключей 11k.i- 11k.mk управления и разделительных диодов 12k mk, и источник 13 питания,
Каждый k-й КП (фиг. 3) содержит узел 14 набирания объекта, включающий в себя цепочку из последовательно соединенных резисторов 15i-15mk по числу объектов управления и элементы 16i-16mk равнозначности, выходы 171-17mb которых являются выходами КП, первый 18 и второй 19 адресные резисторы, формирователь 20 заданного потенциала и источник 21 питания.
Система работает следующим образом.
В исходном состоянии ключи 11 управления ДП 1 разомкнуты, а во всех КП 6i-6n формирователи 20 заданного потенциала обеспечивают разность потенциалов между входами 7 и 8, близкую к нулю. При этом во всех КП сигналы на выходах соответствуют логическому нулю, так как ни для одного из элементов 16 разнозначиости не соблюдаются условия баланса потенциалов на их входах.
Для передачи команды на ДП 1 замыкается ОДИН ИЗ ключей 11k.1-11k.mk управления, например ключ 112.2. соответствующий второму объекту управления второго КП. При этом на обоих входах элемента 162 равнозначности второго КП потенциалы оказываются равными (в пределах зоны нечувствительности элемента равнозначности). Баланс потенциалов на входе элемента 162 приводит к появлению сигнала на его выходе 172, соответствующего логической единице. На всех остальных выходах КП системы управляющие сигналы отсутствуют, так как на входах всех остальных элементов равнозначности - разбаланс потенциалов. После срабатывания объекта управления ключ управления размыкается и система готова к передаче следующей команды телеуправления.
Адресное разделение КП 6ч-6п обеспечивается выбором соответствующих значений первого 18 и второго 19 адресных резисторов. Последние для каждого КП являются эквивалентами суммарных сопротивлений цепочек резисторов узлов избирания объектов, соответственно предыдущих м последующих по отношению к данному из КП, Для обеспечения равной степени помехоустойчивости сопротивления резисторов 15i-15mk цепочки узла избирания объекта выбирают равными. Если принять, что сопротивление каждого из указанных резисторов равно R, то сопротивления адресных резисторов 18 и 19 для всех КП, кроме первого и последнего, должны соответствовать следующим значениям:
i k-1
Rm( i 1
Ri9 ( mA-R,
M k +1
т.е. для k-ro КП сопротивление резистора 18
эквивалентно суммарному сопротивлению резисторов цепочек узлов избирания объекта КП с 1-го по (к - 1)-й, а сопротивление адресного резис.тора 19- суммарному сопротивлению резисторов цепочек КП
c(k+ 1)-го по n-й, Для первого и последнего КП системы значения сопротивления адресных резисторов 18 и 19 равны нулю.
Таким образом, предлагаемое техническое решение позволяет осуществлять
телеуправление рассредоточенными объектами по физической линии связи произвольной конфигурации, что расширяет информационные возможности балансной системы телеуправления при ее огносительной простоте, надежности и экономичности.
Формула изобретения Балансная система телеуправления, содержащая на диспетчерском пункте узел избирания команды, включающий в себя последовательно соединенные резисторы по числу объектов управления, цепочки из последовательно соединенных ключа управления и разделительного диода, одни
ко|нцы которых подключены к вторым выводам одноименных резисторов, а другие концы объединены и соединены с вторым проводом линии связи, и источник питания, отрицательный полюс которого соединен с
выводом первого резистора узла избирания команды и первым проводом линии связи, на контролируемом пункте - узел избирания объекта, состоящий из цепочки последовательно соединенных резисторов по
числу объектов управления, элементов равнозначности, первые входы которых соединены с вторыми выводами одноименных резисторов цепочки, вторые входы объединены и подключены к второму проводу линии связи, а выходы являются выходами системы, и источник питания, отрицательный полюс которого соединен с первым проводом линии связи, от личающая- с я тем, что, с целью повышения информативности системы, введены дополнительные контролируемые пункты, узел избирания объекта каждого из которых выполнен aria- логично узлу избирания обьекта первого контролируемого пункта, на диспетчерском
пункте введены дополнительные узлы изби- рания команды по числу контролируемых пунктов, выполненные аналогично первому, вывод первого резистора каждого последующего узла избирания команды соединен с вторым выводом последнего резистора каждого предыдущего узла избира- ния команды, второй вывод последнего резистора последнего узла набирания команды соединен с положительным полюсом источника питания, а вторые выводы цепочек из последовательно соединенных ключа управления и разделительного диода всех узлов иэбирания команды объединены, на каждом контролируемом пункте введены первый и второй адресные резисторы и формирователь заданного потенциала, отрицательный полюс источника
0
питания подключен к первому выводу первого адресного резистора и входу формирователя заданного потенциала, выход которого подключен к вторым входам элементов равнозначности узла избирания объекта, первый вывод первого и второй вывод последнего резисторов которого подключены соответственно к второму выводу первого адресного резистор а и первому выводу второго адресного резистора, второй вывод которого соединен с положительным полюсом источника питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телемеханики | 1989 |
|
SU1679516A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ДВУХПОЗИЦИОННЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2244344C2 |
| УСТРОЙСТВО для ТЕЛЕИЗМЕРЕНИЯ И КОНТРОЛЯ ПАРАМЕТРОВ ПРИБОРОВ ШАХТНОЙ ВЕНТИЛЯЦИИ | 1973 |
|
SU382128A1 |
| Система телемеханики | 1983 |
|
SU1140142A1 |
| Устройство для приема и передачи сигналов | 1981 |
|
SU972545A1 |
| Система сбора информации для рассредоточенных объектов | 1974 |
|
SU532116A1 |
| Устройство для опроса объектов телеизмерения и телесигнализации | 1977 |
|
SU714459A1 |
| Устройство для передачи и приема информации телеуправления сосредоточенными объектами | 1974 |
|
SU528000A1 |
| Система телемеханики | 1983 |
|
SU1149296A1 |
| Система телемеханики для рассредоточенных объектов | 1975 |
|
SU556477A1 |


Изобретение относится к области телемеханики и может быть использовано для телеуправления рассредоточенными объектами по физической линии связи произвольной конфигурации. Цель изобретения - повышение информативности системы. Система содержит диспетчерский пункт (ДП), двухпроводную линию связи и контролируемые пункты (КП), Диспетчерский пункт содержит узлы избирания команды (по числу подключенных КП) и источник питания. Каждый k-й контролируемый пункт содержит узел избирания объекта, первый и второй адресные резисторы, формирователь заданного потенциала и источник питания. В исходном состоянии все ключи управления узлов избирания команды ДП разомкнуты и управляющие сигналы на выходах всех КП соответствуют логическому нулю. Для передачи команды телеуправления на диспетчерском пункте замыкается один из ключей управления объектом выбранного КП и на выходе узла избирания объекта соответствующего КП появляется сигнал управления для заданного объекта. Адресное разделение контролируемых пунктов обеспечивается выбором значения сопротивлений адресных резисторов на каждом КП. Предлагаемое техническое решение позволяет осуществлять телеуправление рассредоточенными объектами по физической линии связи произвольной конфигурации, что расширяет информационные возможности балансной системы телеуправления при ее относительной простоте, надежности и экономичности. 3 ил. Ё О ю ел 00 ел
13L
Фиг. 1
t3C969t
| Балансное устройство телемеханики | 1987 |
|
SU1481825A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
