Изобретение относится к аэрофотосъ- емке и может быть использовано для дальнейшего повышения качества съемки за счет автоматического регулирования экспозиции.
Целью изобретения является повышение качества изображения за счет оптимизации длительности экспонирования
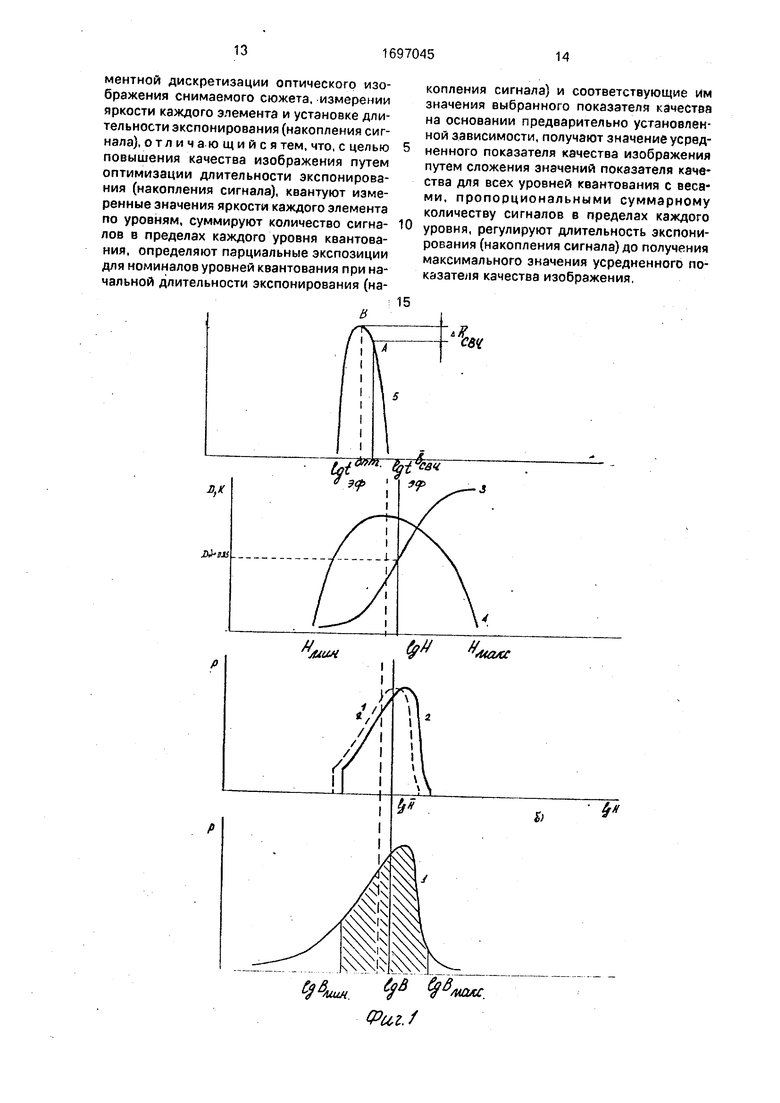
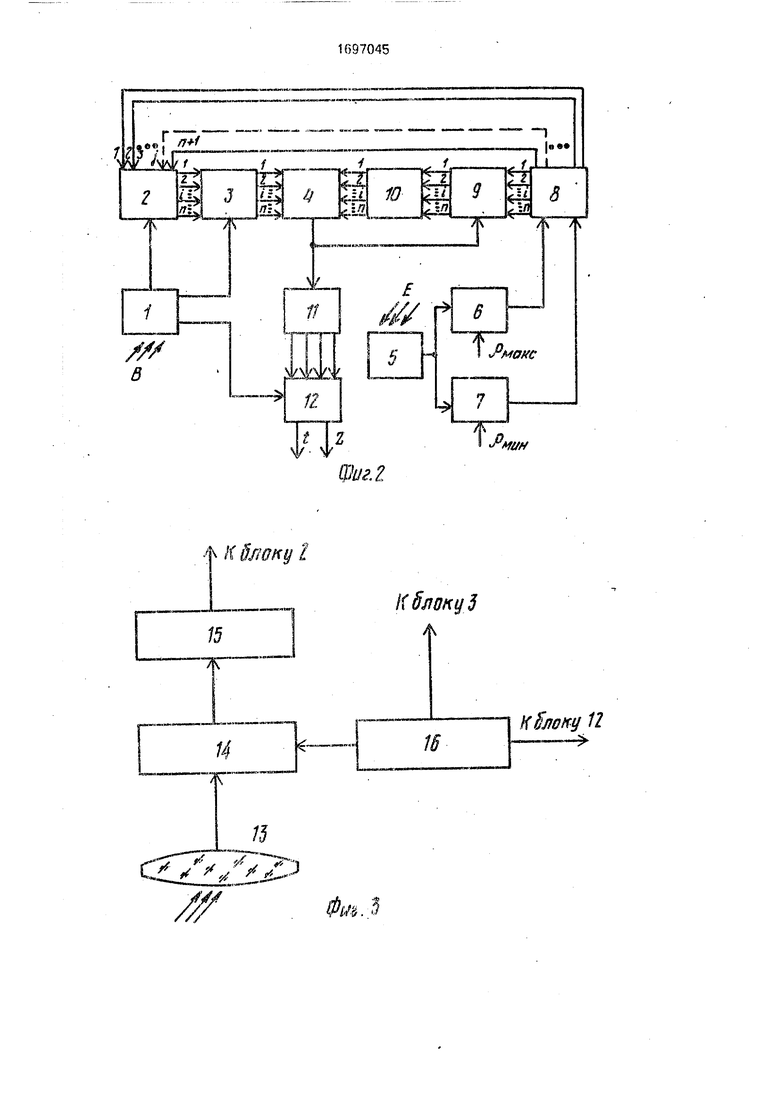
На фиг. 1 представлен график определения оптимальной экспозиции и ее регулирования со следующими обозначениями; на фиг. 2-6 структурная схема устройства, реализующего способ
На фиг. 1 введены следующие обозначения:
1 - распределение яркостных характеристик фотографируемого аэроландшафта в
пределах кадра (масштаб по оси яркостей - логарифмический)- P(lgB),
Вмин и Вмакс - граничные значения яркости, определяющие сюжетно важную часть кадра (область сюжетно важной части заштрихована),
Всвч - средняя яркость в пределах сюжетно важной части
2 - распределение яркостных характеристик фотографируемого аэроландшафта пересчитанное к оси экспозиций с использованием известной формулы
О
о ч о
-N ел
1Эф/Ка,
(1)
причем Ка
47„
Га л
- аппаратурный коэффициент (при логарифмическом масштабе по оси экспозиций
1дН 1дВ+1д1Эф-1дКа, - P(lgH:
3- характеристическая кривая;
4- кривая зависимости показателя качества изображения от экспозиции (при логарифмическом масштабе) - К(1дН)
5- кривая зависимости усредненного в пределах сюжетно важной части кадра показателя качества изображения от величины эффективной выдержки - КСвм(д1эф).
Показатель качества изображения К зависит от выбора целевой задачи фотографирования. Например, при аэрофотосъемке земной поверхности в качестве целевой задачи может рассматриваться правильное опознавание малоконтрастных и малоразмерных объектов В этом случае в качестве показателя К удобно использовать вероятность правильного опознавания Рпр, зависимость которой от экспозиции может быть установлена либо экспериментально, либо в результате модельных расчетов. Так, известно, что
- (BcpdoRc)2,
где do - диаметр окружности, равновеликой геометрическому изображению распознаваемого объекта;
Рф - коэффициент, которым учитывается сложность формы объекта;
RC - разрешающая способность фотосистемы (зависит от экспозиции),
Начало координат на фиг. 1а и к выбрано специальным образом так, чтобы обеспечить наиболее удобное для иллюстозции положение кривых 1 и 5.
Из формулы (1) ясно, что на выбранных осях координат (фиг, 1) изменение величины эффективной выдержки соответствует поступательному перемещению кривой 2 вдоль оси абсцисс. Таким образом, суть экс- понометрического расчета заключается в поиске значения величины 13ф, отражающей некоторое определенное положение кривой 2 относительно кривых 3 и 4. В случае прототипа подбор величины эффективной выдержки осуществляется до совмещения величины Н (где: Н - экспозиция, соответствующая величине ВСач (формула 1) с точкой характеристической кривой, определяемой критерием светочувствительности D0+0,85 (кривая 2), При этом среднее значение показателя качества изображения в пределах сюжетно важной части кадра (т.А кривой 5) может быть рассчитано с использованием формулы
Вмакс Кспч / Р(В 1эф Ка) К(В 1эф Ка )dB.
Врмин
(2)
где аргументы сомножителей под знаком интеграла имеют смысл экспозиции Н, а ВР
личина т.3ф равна значению эффективной вы- дер-жки, рассчитанной по средней яркости1 (1эф свч). Ясно, что экспонометрическчй расчет по средней яркости с учетом произвольной формы кривой 1 лишь в отдельных случаях сможет обеспечить максимальное значение; величины КСвч, которое будет достигнуто при оптимальном положении кривой 2 относительно кривых 3 и 4.. В
0 результате выбранные экспономзтриче- ским расчетом по средней яргасти условия экспонирования (выдержка т,эф вч) далеко не всегда обеспечивают воспроизведение на фотопленке максимального числа зле5 ментарных участков местности с наилуч иим качеством.
Способ позволяет устранить указанный недостаток за счет определения величины эффективной выдержки по оптимальному
0 алгоритму, обеспечивающему достижение максимального значения усредненного в пределах сюжетно части кадра показателя качества изображения. При этом tэфoпт arg макс(КСВч(Тзф))}.(3)
5Оптимальной величине эффективной
выдержки 1эфопт будет соответствовать положение кривой 2 А показанное на фиг. 16. Прирост величины К( ( составляет: ..
Л I/- 17( л.ОГП} VIt : ВСВЧч
/Л .вч свч { ф ) 1хсвч(.1эф /.
0 Гоафмческэя ил-юстрация величины ДКсоч приведена на фиг. 1г, где т. В соответствует максимуму величины КСвч. Производится считывание яркостной картины фотографируемою аэроландшафтз иосуще5 еггвляет построение распределения яркост- ных характеристик в пределах сюжетно важной части кадра. Затем определяется величина tэфoпт с использование формул (2) и (3)
0 При реализации способа учитывают невозможность непрерывного измерения яркостей во всем диапазоне и по этой причине вводят уровни квантования с соответствующими весами, что является дискретным ана5 логом формул (2) и (3).
Устройство содержит блок 1 измерения яркости, блок 2 компараторов, бпок 3 интеграторов, экстремальный коррелятор 4, блок 5 измерения освещенности, первый блок 6
0 умножения, оторой блок 7 умножения, блок формирования опорных напряжения 8, п блоков умножения 9, блок 10 вычисления весовых коэффициентов, блок 11 определения величин регулируемых параметров,
5 блок 12 формирования управляющих сигналов,
Блок 1 измерения яркости предназначен для пространственного сканирования участков местности в пределах поля кадоа и
формирования электрического сигнала UB, пропорционального суммарной яркости элементарных участков подстилающей поверхности. Блок измерения яркости (фиг. 3) включает в себя расположенный в фокаль- ной плоскости объектива 13 перпендикулярно направлению движения носителя фотоаппаратуры линейный прибор с зарядовой связью (ЛПЗС) 14, выход которого подключен к усилителю 15, выход которого является первым выходом блока 1-измерения яркости 1, и генератор 16 тактовых импульсов (ГТИ), соединенный своим первым выходом с входом ЛПЗС 14, второй и третий выходы ГТИ 16 являются вторым и -третьим выходами блока измерения яркости 1. ЛПЗС 14 предназначен для преобразования яркости элементарных участков местности в последовательность зарядовых пакетов. ГТИ 16 предназначен для синхро- низации и управления работой ЛПЗС 14, а также для формирования импульсов для управления работой блока интеграторов 3 и блока формирования управляющих сигналов 12.
Блок компараторов 2 предназначен для разделения сигнала UB поступающего на его первый вход, по п уровням квантования и формирования на своих п выходах сигналов по правилу:
еслии UB Uj+1 в противном случае,
где И (1,2п),
UBKI - выходной сигнал на i-м выходе блока компараторов 2;
U/, Uj-H1 - опорные напряжения на вторых п+1 входах блока компаратора 2.
Блок интеграторов 3 предназначен для накопления по каждому из п каналов сигналов, поступающих нз его п входов и формирования результирующих сигналов Up(Bi) (.2....,п) на соответствующих выходах.
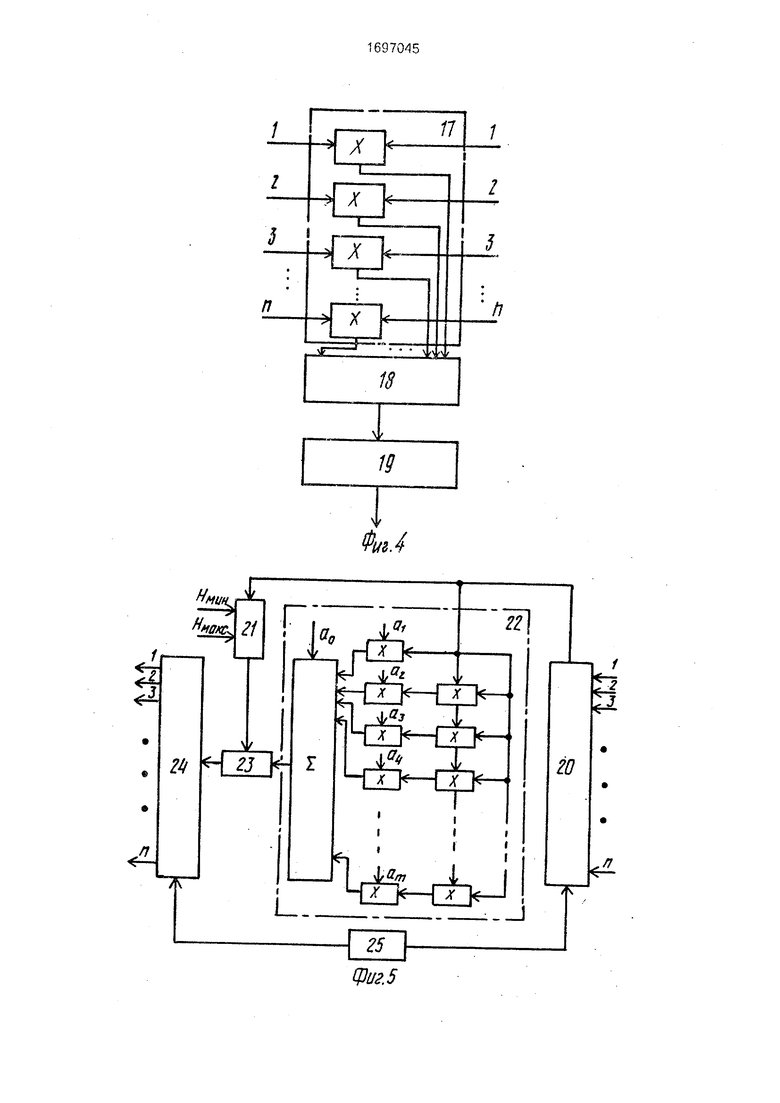
Экстремальный коррелятор 4 предназ- начен для вычисления взаимной корреляционной функции двух сигналов, поступающих на его первые и вторые п входов, и формирования на выходе сигнала 1Кэфопт. обеспечивающего достижение максимума взаимной корреляционной функции. По своей сути экстремальный коррелятор 4 предназначен для реализации вычислений по дискретному аналогу формулы (3) в следующем виде:
1Ьфопт Ј UP(B,) UKCH.). (4) i 1
где ,2Ux(Hi) - сигнал, пропорциональный величине показателя качества изображения, соответствующей экспозиции Н| Bi Тэф/Ка.
Структурная схема приведена на фиг. А. Схема содержит п блоков 17 умножения, каждый из которых имеет два входа, являющиеся входами экстремального коррелятора 4, выходы блоков 17 умножения подключены к п раздельным входам сумматора 18, выход которого соединен с входом экстремального регулятора 19, аыход которого является выходом экстремального коррелятора 4.
Блок 5 измерения освещенности предназначен для преобразования освещенности Е в плоскости полета в пропорциональный ей электрический сигнал UEБлоки 6, 7 и 9 умножения предназначены для формирования на своих РЫХОДЗХ сигналов, пропорциональных произведению сигналов, поступающих на их раздельные входы.
Блок 8 формирования опорных напряжений предназначен для формирования на своих выходах сетки опорных напряжений, необходимой для задания интервалов квантования яркостей. Опорные напряжения могут быть сформированы, например, по правилу:
и/ ивмин -ДГ1. Д:(-Увмакс I UBMHH J-1.2П+1,
для п +1 первых выходов и
VUj Uj+11 „ ,2n (6)
для п вторых выходов.
Блок 10 вычисления весовых коэффициентов предназначен для формирования на своих выходах сигналов UK(HI), пропорциональных значению показателя качества изображения в зависимости от величины входных сигналов UHI, пропорциональных экспозиции Hi(,2,...,n). Вычисление сигналов UK{HI) может быть реализовано с использованием аппроксимирующих алгебраических полиномов
. UK(HO
ja0 + 2, ак UHI , если Нмин HI Нмакс
к 1 |0 ,в противном случае
(7)
где m - степень аппроксимирующего полинома;
а0, ai, ..., am - коэффициенты полинома, заданные априорно,
НМин, Нмакс - границы интервала, внутри которого выбранный показатель качества изображения отличен от нупя.
Структурная схема блока вычисления весовых коэффициентов 10 представлена на фиг, 5. Схема содержит мультиплексор 20, схему 21 сравнения, блок 22 вычислений, блок 23 умножения, мультиплексор 24, ГТИ 25, причем первые п входов мультиплексора являются входами блока 10 вычис- ления весовых коэффициентов, выход мультиплексора 20 соединен с входом схемы 21 сравнения и ьходом блока 22 вычислений, состоящего из 2т-1 блоков умножения и одного сумматора, выход кото- рого соединен с первым входом блока 23 умножения, второй вход которого подключен к выходу схемы 21 сравнения, а выход соединен с первым входом демультиплексо- ра 24, п выходов которого являются зыхода ми блока 10 вычисления весоаьх коэффициентов, первый и второй выходы ГТИ 25 подключены соответственно к п+1 входу мультиплексора 20 и второму входу демуль- типлексора 24.
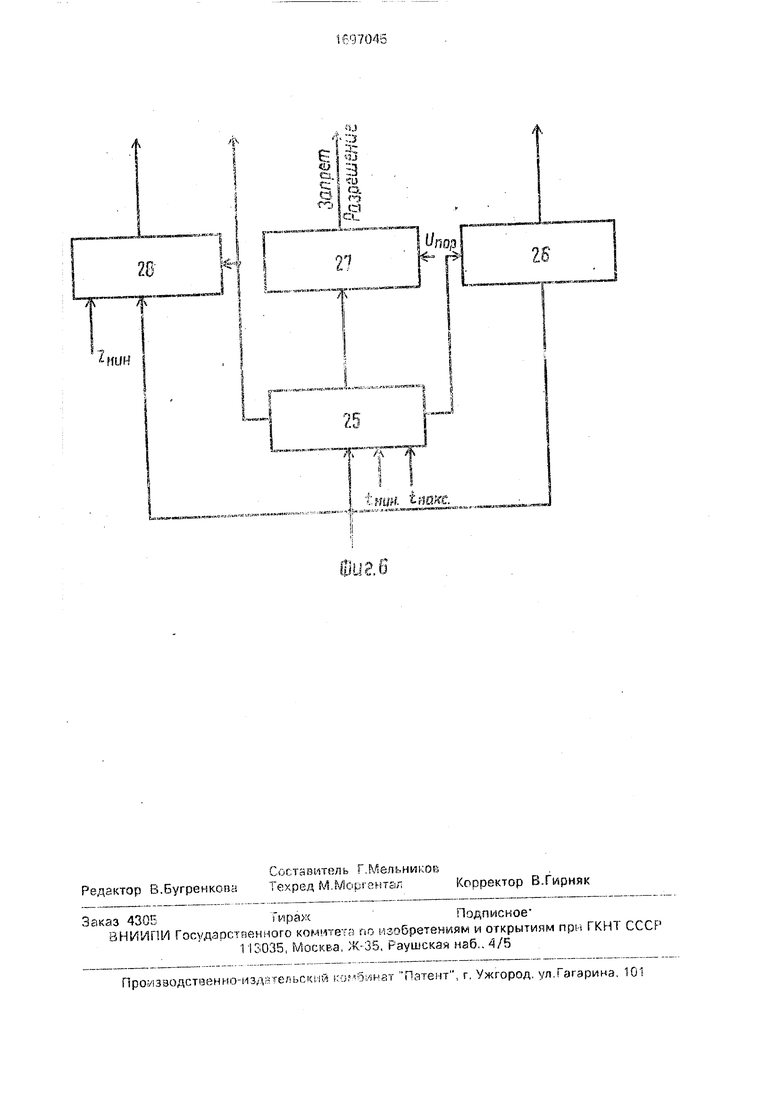
Блок 11 определения величин регулируемых параметров предназначен для опрг деления в соответствий с входным сигналом, пропорциональным оптимальней ве личине эффективной зидерхски , ве личин времени экспонирования v, относительного фокусного расстояния Z с учеток ограничений, нэкладызаемых конкретными особенностями усфойствя аэрофотоаппарата и необходимостью опт- мизации соотношения между величинами t и7сучетомзаданныхтреио8анмй к качеству изображения. Блок 11 можетбьп г. выполнен по схеме, приведенной на фиг, 6. Схема содержит блок 25 сравнения, блок 26 совпа- дения, пороговое устройство 27, блок 28 вычисления, причем первые входы блока 25 сравнения, блок 26 совпадения и блока 28 вычисления объединены и являются входом блока 11 определения величин регулируе- мых параметров, причем первый выход блока 25 сравнения подключен к второму вход блока 26 совпадения, выход которого является первым выходом блока 11 определения величии регулируемых параметров, второй выход блока сравнения подключен к входу порогового устройства 27 выход которо го является вторым выходом блока 11, третий выход блока 25 сравнения является третьим выходом блока 11 определения ое- личин регулируемых параметров и параллельно подключен к второму чходу блока 28 вычисления, выход которого является четвертым выходом блока 11 определения величия регулируемых параметров.
Блок 12 формирования управляющих сигналов предназначен для управления работой азрофотоаппарата в части экспонирования посредством выдачи управляющих сигналов ма установку требуемых величин t и Z D моменты времени, определяемые приходом разрешающего импульса из блока 1 измерения яркости.
Устройство работает следующим образом.
Изображение местности, построенное обьектипом 13, последовательно сканируется ЛПЗС 14. Развертка по кадру осуществляется за счет движения носителя фотоаппаратуры, Раззертка по строке осуществи я ется за счет перемещения зарядовых пакетов в ЛПЗС 14, управление которым осуществляется тактовыми импульсами ст ГТИ 16, поступающими с его первого выхода на вход ЛПЗС 14. Тактовая частота следования импульсов fT выбирается из следующего соотношения
frW f t
Н d
(8)
где W - скорость движения носителя;
f - фокусное расстояние обьективэ;
Н - ьысоге фотогоафирования,
d - размер светочувствительной ячейки ЛПЗС 14 ьдопь напр вления движения носителя;
С,- количество светочувствительных ячеек ЛПЗС 14.
ЛПЗС 14 преобразует яркость изображения элементарных участков местности в последовательность зарядовых пакетов, ко- орая с выхода ЛПЗС 14 через усилитель 15 поступает на вход блока компараторов 2. Одновременно блок 5 измеряет освещенность с а плоскости полета и формирует на- споем выходе сигнал UE, который поступает на первые входы блоков 6 и 7 умножения, на еторые входы которых поданы сигналы Урмакс и УРМИИ (задаются априорно, например, на этапе настройки устройства АРЭ). На выходах блоков 6 и 7 умножения формируются сигналы ивмакс и ивмин, пропорцио- нальные пороговым яркостям, определяющим сюжетно важные части изобра- жо«пч. Сигналы Квмакс и UBMHH с выходов блоков 6 и 7 умножения поступают соответственно на первый и второй входы блока 8 формирования опорных напряжений. Блок 8 осуществляет разделение интервала сиг- ЧЬЛПР 1 вмин; Квмакс из п частей, например, по формулам (5) и (6), и формирует на своих первых п+1 выходах набор напряжений Uj1 ,2,. ,,п+1), устанавливающих границы уровней квантования сигналов, пропорциональных яркости элементарных участков
UBi а на вторых п выходах - набор напряжений Ui (1,2,..,,n), соответствующих номиналам уровней квантования (среднему геометрическому границ интервалов). Сигналы Uj ,2п+1) с первых п+1 выходов
блока формирования опорных напряжений 8 поступают на вторые п+1 входы блока 2 компараторов. Блок компараторов 2 осуществляет сравнение величины сигнала UB, поступающего на его первый вход, с сеткой опорных напряжений, заданных набором U/ 0 1 2п+1), и в случае попадания величины UB в один из интервалов Uj; Uj-и
,2п) формирует на своем i-м выходе
() сигнал Uo. Длительность сигнала U0 соответствует времени,в течение которого выполняется условие ; Uj+i . Сигналы с п выходов блока 2 компараторов поступают на соответствующие п входов блока интеграторов 3, который осуществляет накопление поступающих сигналов и формирует на своих п выходах интегральные сигналы UP(BI) в соответствии с выражением
UP(BI) / Uo(t) ; Uj +l +
+ 0 IU ;Uj-M c t
(9)
где ,2n;
т. - время сканирования одного кадра.
По завершению сканирования поля кадра на п выходах блока интеграторов 3 формируются сигналы Up(Bi), пропорциональные дискретному распределению плотности вероятности (гистограмме) яркости элементарных участков в сюжетно важной части изображения кадра. Перед началом сканирования очередного кадра блок 1 измерения яркости формирует на своем втором выходе синхросигнал, поступающий на п+1-и вход блока 3 интеграторов, по которому происходит обнуление интеграторов, Тем самым блок 3 подготавливается к очередному циклу работы. Сигналы Up(Bi)(,2п) с выходов блока 3 интеграторов поступают на первые п входов экстремального коррелятора 4, Одновременно сигналы Ui (,2,....п), соответствующие номиналам уровней квантования яркостей, с вторых п выходов блока 8. формирования опорных напряжений поступают на соответствующие первые входы блоков 9 умножения, на вторые объединенные входы которых поступает сигнал игэф с выхода экстремального коррелятора 4, пропорциональный эффективной выдержке. В результате на выходах п блоков 9 умножения формируются сигналы UHI, величины которых пропорциональны экспозиции
Hi(,2п). Сигналы с выходов п блоков 9
умножения поступают на соответствующие п входов блока 10 вычисления весовых коэффициентов. Блок 10 осуществляет преобра- зование входных сигналов в соответствии с формулой (8) и формирует на п выходах сигналы L)K(Hi), пропорциональные значению показателя качества изображения в точке, соответствующей экспозиции Hi(1,2,...,n),
0 Блок вычисления весовых коэффициентов работает следующим образом. Входные сигналы поступают на п входов мультиплексора 20, на n+1-й, вход которого с первого выхода ГТИ 25 поступают синхросигналы
5 тактовой частоты fT. Мультиплексор 20 с частотой следования синхросигналов осуществляет последовательную во времени коммутацию сигналов с п входов на выход. С выхода мультиплексора 20 сигналы одно0 временно поступают на входы схемы 21 сравнения и блока 22 вычисления. Схема 21 сравнения сравнивает входной сигнал с априорно заданными сигналами Унмин и Кнмакс, определяющими границы интерва5 ла, внутри которого показатель качества изображения отличен от нуля. Если входной сигнал попадает в интервал Уимин, UHMSKC, то схема сравнения формирует на своем выходе единичный сигнал, в противном случае
0 - нулевой. Указанный сигнал поступает на второй вход блока 23 умножения. Блок 22 вычисления производит преобразование входного сигнала в соответствии с формулой (8). Полученный сигнал UK(HI) поступает
5 с выхода блока 22 вычислений на первый вход блока 23 умножения. Блок 23 производит перемножение поступающих на его входы сигналов и результат формирует на выходе. Сигнал с выхода блока 23 умноже0 ния поступает на первый вход демультип- лексора 24, на ВТОРОЙ вход которого с второго выхода ГТИ 25 поступают синхросигналы тактовой частбтой fT. Фазовый сдвиг между синхросигналами, формируемым на
5 первом и втором выходах ГТИ 25 и значение частоты ft выбираются, исходя из необходимости обеспечения синхронной работы блоков 20 и 24, с учетом быстродействия схемы. Демультиплексор 24 осуществляет дейст0 вия, противоположные мультиплексору 20, т.е. производит обратную коммутацию сигналов. В результате в моменты времени, определяемые следованием синхросигналов частоты ft, сигналы с входа демультип5 лексора 24 передаются на соответствующие выходы. Таким образом, на соответствующие входы экстремального коррелятора 4 с одной стороны поступают сигналы UK(HI), пропорциональные значению показателя ячества изображения в точке, соответствующей экспозиции HI (,2п), а с другой
(из блока интеграторов 3) - сигналы, пропорциональные распределению яркостных характеристик фотографируемого аэроландшафта в пределах сюжетно важной части кадра. Экстремальный коррелятор 4 производит преобразование поступающих сигналов в соответствии с формулой (5) и формирует на своем выходе сигнал Utacp. который поступает по цепи обратной связи на вторые объединенные входы блоков 9 умножения. Экстремальный регулятор 18, входящий в состав экстремального коррелятора 4, изменяет сигнал обратной связи таким образом, чтобы обеспечить достижение и поддержание в дальнейшем максимума
функционала Т (Up(Bi) UK(HI))- С учетом i 1
зависимости Н- В Хэф/Ка выходной сигнал экстремального коррелятора 4 имеет смысл оптимальной величины эффективной держки (. обеспечивающей достижение максимального значения усредненного в пределах сюжетно важной час™ кадра показателя качества изображения КСв. Кроме того, сигнал с выхода экстремального коррелятора 4 поступает на входы блока 11 определения величии регулируемых параметров, который сравнивает величину с заданными величинами UIMMH и UtwaKc, пропорциональными минимальному и максимальному временам экспонирования, которые могут быть реализованы фото- аппаратурой, и в зависимости от результатов сравнения формирует через соответствующие свои выходы на входах блока 12 формирования управляющих сигналов либо сигналы, пропорциональные требуемым значениям времени экспонирования t и относительного фокусного расстояния Z с учетом оптимального соотношения между ними, либо импульс на запрет фотографирования. Блок 11 работает следующим образом (фиг. 6):
1. Если при сравнении величины с величинами UIMHH и Угмакс выполняется неравенство
1)(мии S3 итэф°ПТ UIMBKC
то блок 25 сравнения формирует на своем первом выходе постоянное напряжение, поступающее в блок 26 совпадения, который, выполняя роль, пропускает сигнал 1)1эфопт на второй вход блока 12 формирования управляющих сигналов. В этом случае блок 12 после поступления на его первый оход разрешающего импульса который формируется на третьим выходе блока 1 измерения яркости в конце просмотра очередного кадра после окончания переходных процессов.
выдает управляющие сигналы в аэрофого- аппарат на установку следующих величин t HZ:
-1зфопт;
Z Z|vtHH,
где ZMHH - минимальное относительное фокусное расстояние объектива аэрофотоаппарата.
2.ЕСЛИ 1 1эфОПТ Угмакс ,
то блок 25 сравнения формирует на своем втором выходе сигнал, пропорциональный разности и1эфопт-игмакс, который подеется на вход 27 порогового устройства, Пороговое устройство 27 сравнивает полученный
сигнал с некоторым априорно заданным пороговым напряжением Опор, определяющим допустимое недоэкспонирование, и если 1Лзфопт-(Лма.с Unop -- формирует на выходе некоторый постоянный сигнал, который поступает на третий вход блока 12 формирования управляющих сигналов. Блок 12 после получения разрешающего импульса выдает управляющие сигналы в аэрофотоаппарат на установку следующих величин t
и Zч
тумаке;
2 ЕмаксЕсли и|эфспт и1макс Unop, то полярность сигнала на выходе порогового устройства 27 меняется и блок 12 ф ,эмирования управляющих сигналов выдает импульс на запрет фотографирования.
3.Если 1Ьфопт UtM.ni.
то блок 25 сравнения формирует на своем третьем выходе сигнал UIMMH, который поступает на четвертый вход блока 12 формирования управляющих сигналов и на второй вход блока вычислений 28. Последний формирует на своем выходе смгнап Uztwvnt, про-. порциональный требуемой величине относительного фокусного расстояния для минимального времени экспонирования т.миь, в соответствии с выражением
5
Uz
.tMMH
U
гмин
UIMHH
иефопт
где сигнал UZMHM задан априорно.
Выходной сигнал блока 28 вычислений
0 поступает на пятый вход блока 12 формиоо- взния управляющих сигналов, который после получения разрешающего импульса оыдает в аэрофотоаппарат управляющие сигналы на установку следующих величин t
5 12:,
,
.
Формула изобретения Способ регулирования экспозиции, заключающийся в пространственной поэлементиой дискретизации оптического изображения снимаемого сюжета, измерении яркости каждого элемента и установке длительности экспонирования (накопления сигнала), отличающийся тем, что, с целью повышения качества изображения путем оптимизации длительности экспонирования (накопления сигнала), квантуют измеренные значения яркости каждого элемента по уровням, суммируют количество сигналов в пределах каждого уровня квантования, определяют парциальные экспозиции для номиналов уровней квантования при начальной длительности экспонирования(на0
копления сигнала) и соответствующие им значения выбранного показателя качества на основании предварительно установленной зависимости, получают значение усредненного показателя качества изображения путем сложения значений показателя качества для всех уровней квантования с весами, пропорциональными суммарному количеству сигналов в пределах каждого уровня, регулируют длительность экспонирования (накопления сигнала) до получения максимального значения усредненного показателя качества изображения.
15


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической регулировки экспозиции | 1978 |
|
SU697953A1 |
| Устройство для автоматической регулировки экспозиции | 1981 |
|
SU999000A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЭКСПОЗИЦИИ | 2000 |
|
RU2172976C1 |
| Устройство для автоматического регулирования экспозиции | 1981 |
|
SU959017A1 |
| Способ формирования изображения карты дальностей до наблюдаемых объектов в рассеивающих средах | 2024 |
|
RU2837050C1 |
| Устройство для определения положения объекта на изображении | 1988 |
|
SU1569853A2 |
| Устройство для определения экспозиции при съемке и печати на светочувствительные материалы | 1975 |
|
SU667941A1 |
| Фотокамера | 1985 |
|
SU1293689A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРЕМЕНЕМ ЭКСПОЗИЦИИ, КОЭФФИЦИЕНТАМИ УСИЛЕНИЯ И ЦВЕТОВЫМ БАЛАНСОМ В МАТРИЧНЫХ ФОТОПРИЕМНИКАХ (ВАРИАНТЫ) | 2006 |
|
RU2333614C1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2565608C1 |
Изобретение относится к аэрофотосъемке и позволяет повысить качество получаемых изображений за счет определения оптимальной экспозиции и ее автоматического регулирования Цель изобретения - повышение качества изображения за счет оптимизации длительности экспонирования В способе регулирования экспозиции осуществпяют пространственную поэлементную дискретизацию оптического изображения, измеряют яркость каждого элемента квантуют измеренные значения яркости по уровням, суммируют количество сигналов в пределах каждого уровня, определяют парциальные экспозиции для номиналов уровней при некоторой начальной длительности экспонирования, определяют показатель качества на основе выбранной зависимости, получают усредненный показатель качества путем сложения показателя качества для всех уровней с учетом весов, пропорциональных плотности сигнала внутри уровня и регулируют экспозицию до получения максимального значения усредненного показателя качества 6 ил (Л
J&irjs.
Puz.f
ю
«т о г- о
со
и
W
SWU691
| Мельканович А Ф | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
