Изобретение относится к автома и- ке, в частности к устройствам для определения положения объекта на изображении, может быть использовано в системах распознавания и совмещения изображений объектов и является усовершенствованием устройства по авт. св. К1 1427396.
Цель изобретения - повышение точности устройства.
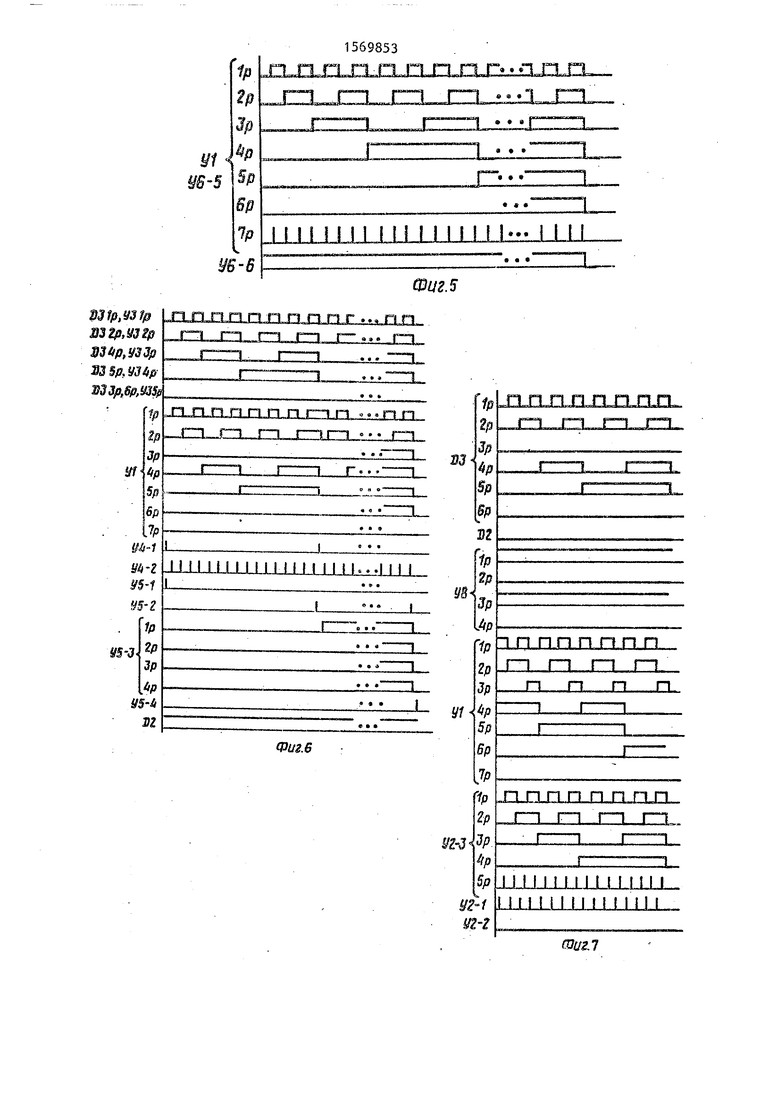
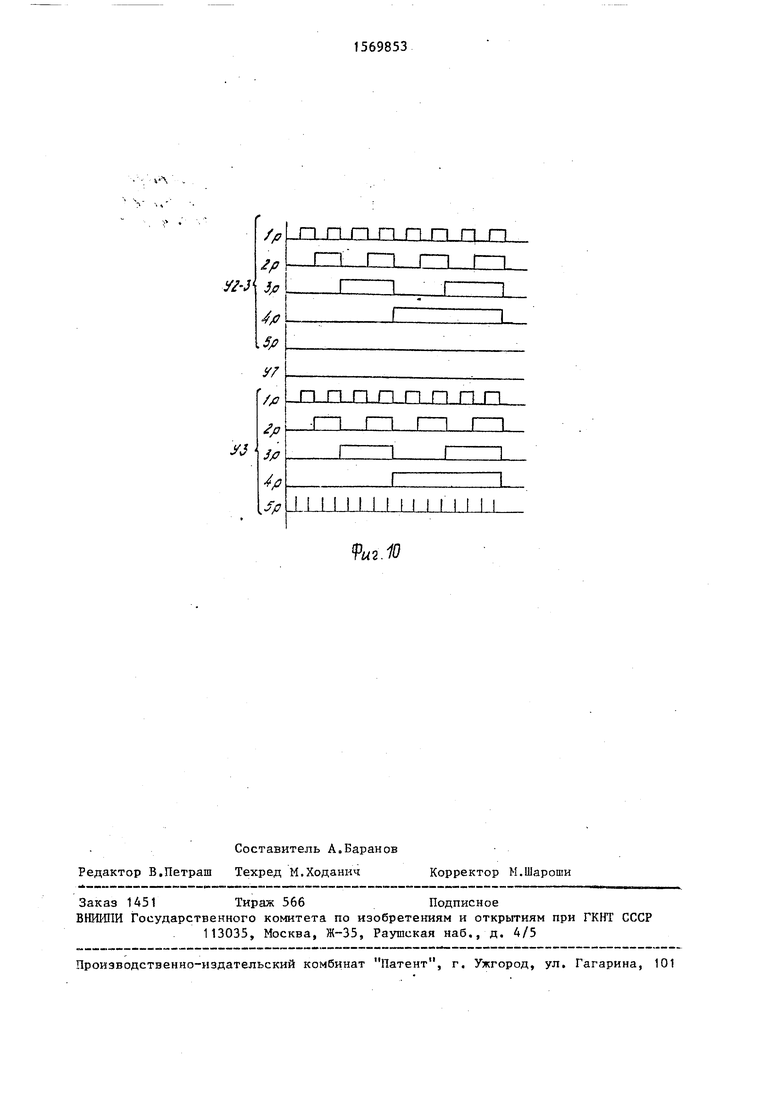
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема коррелятора; на фиг. 3 - схема блока вычисления бинарного изображения объекта; на фиг. 4 - схема изображения объекта; на фиг. 5-10 - временные диаграммы управляющих сигналов.
Устройство (фиг. 1) содержит первый блок 1 памяти, блок 2 временного сглаживания, коммутатор 3, блок 4 управления, второй блок 5 памяти, кор-
релятор 6, блок 7 определения координат, блок 8 формирования бинарного изображения и третий блок 9 памяти.
Коррелятор 6 содержит вьгчитатель 10, блок 11 постоянной памяти (БПП), сумматор 12 и регистр 13,
Блок 8 вычисления бинарного изображения объекта содержит блоки 14 и 15 оперативной памяти (БОН), сумматоры 16 и 17, вычитатель 18, блоки 19-21 постоянной памяти (БПП), регистры 22-24, элемент ИЛИ 25.
При составлении временных диаграмм считалось, что текущее и-ображе- ние G имеет размерность элементов, эталонное изображение Н и бинарное изображение Z объекта - элементов, сглаженное изображение V объекта - элементов.
Устройство работает следующим образом.
ел
оэ
Ј 00 СП
Юо
N)
На вход блока 1 памяти текущего изображения поступает сигнал текущего телевизионного изображения. Период обработки этого сигнала устройством можно разделить на несколько этапов (фиг. 5):
первый - запись текущего телевизионного изображения в блок 1 памяти;
второй - определение координат объекта на текущем телевизионном изображении в корреляторе 6 и блоке 7 определения координат;
третий - межкадровое сглаживание изображения объекта в блоке 2 временного сглаживания;
четвертый - вычисление бинарного изображения объекта в блоке 8 и запись его в блок 9;
пятый - обновление эталонного изображения в блоке 5 памяти эталонного изображения.
На первом этапе на вход блока 1 памяти поступает сигнал текущего телевизионного изображения. Одновременно с этим на вход блока 4 управления поступает внешний управляющий сигнал У6-5, необходимый для синхронизации процесса записи в блок 1. Первые шесть разрядов этого сигнала являются сигналами адреса, а седьмой разряд - сигналом записи. Внешний управляющий сигнал У6-6, поступающий одновременно с сигналом Уб-5, обеспечивает прохождение сигнала Уб-5 через три коммутатора блока 4 управления на управляющий вход блока 1 памяти. Работа устройства на этом этапе поясняется диаграммой, приведенной на фиг. 5.
На втором этапе на входы коррелятора 6 поступают значения текущего и эталонного изображений из блоков 1 и 5 соответственно. В блоке 6 реализуется разностный корреляционно- экстремальный алгоритм. На вход вы- читателя 10 поступают значения элементов текущего и эталонного изображения. Вычитатель 10 вычисляет разность, значение которой поступает на первый вход БГШ 11, с помощью которого вычисляется произведение мо- дуля этой разности на величину Z Ч, j U , поступающую на второй вход БПП 11. На сумматоре 12 и регистре 13 организован накапливающий сумматор, КОТОР.ЫЙ перед началом вычисления обнуляется сигналом У4-1 (фиг. 6). Сигнал У4.-2 является сигналом записи в
5
0
5
0
5
0
5
0
5
регистр 13 о Вычисленное значение поступает в блок 7 определения координат, где определяется минимальная величина среди всех значений. Эти значения поступают в блок 4 управления, где используются при выбору участка текущего изображения.объекта, поступающего на сглаживание в блок 2. Для выдачи на выход устройства вычислен- ные значения координат объекта преобразуются в другую систему координат, в которой координаты объекта равны 0, если объект находится в центре текущего кадра.
На третьем этапе в блоке 2 производится сглаживание изображения объекта. Сглаженное изображение объекта представляет собой сумму большого числа изображений объекта, взятых с монотонно убывающим весом. Так как каждое изображение объекта взято из соответствующего кадра относительно найденных в нем координат объекта, то суммирование изображений объекта приводит к уменьшению дисперсии аддитивной некоррелированной помехи. Другим положительным следствием данного межкадрового сглаживания является сглаживание ошибок. На вход блока 2 поступают значения элементов участка текущего кадра, взятого относительно найденных координат объекта. Выбор соответствующего участка текущего кадра обеспечивается с помощью блока 4 управления. Значения координат объекта в текущем кадре (сигнал у8) поступают из блока 7 определения координат в блок 4 управления.
Четвертый этап можно разделить на три подэтапа:
обнуление содержимого БОП 14 (4.1);
вычисление гистограмм Р„ (4.2);
вычисление элементов матрицы Р и бинарного изображения объекта Z(4.3).
, Обнуление содержимого БОП 14 осуществляется сигналами У9-1, У9-2, У9-3, У2-3 (фиг. 8). Сигнал У9-1 (фиг. 8а) управляет режимом работы БОП 14. Одновременно задним фронтом сигнала У9-1 осуществляется запись информации в регистр 22. Обнуляется регистр 22 нулевым уровнем сигнала У9-2, который также подается на младший разряд первого входа сумматора 16. На остальные разряды первого входа сумматора постоянно подается нулевой код. Второй аход сумматора
о
А Р.
16 соединен с выходом регистра 22. Первый адресный вход БОП 14 соединен с выходом блока 2.
Управляет считыванием цифровых значений яркости а элементов нзо1-а- ження V, хранящегося в блоке 2, сигнал У2-3 (фиг.8 г-к) . Первыо шесть разрядов сигнала являются адресными, а седьмой - режимом записи-считывания. На второй адресный вход БОП 14 поступает сигнал У9-3 (фиг. 8в), который имеет единичное значение, если на первый адресный вход БОП 14 поступает цифровое значение яркости а элемента v Јi, , принадлежащего центральной части изображения V, имеющей размеры эпемента а нулевой уровень, если элемент v i, принадлежит остальной части изображения V.
В течение этапа 4.1 в кгп 14 по адресам, определяемым значениями яркости элементов v , и значением сигнала У9-3, осуществляется запись нулевого кода, который формируется на выходе сумматора 16, поскольку на первый вход сумматора 16 подается нулевой код, образованный нулевым уровнем сигнала У9-2 и постоянным нулевым кодом, а на второй вход сумматора 16 также подается пулевой код с выхода регистра 22.
Вычислениями на этапе 4.2 управляют также сигналы У9-1 - У9-3 и У2-3. Временные диаграммы сигналоп У9-1, У9-3, У2-3 во вр°мя выполнения этапа 4.2 совпадают с временными диаграммами, соотпетгтвукпцими этапу 4.1.
Сигнал У9-2 в процессе выполенния этапа 4.2 в отличие от этапа 4.1 постоянно имеет единичный уровень. Благодаря этому содержимое ячейки БОП 14, выбранное по адресным входам значением сигнала У9-3 и цифровым значением яркости а элемента v i, jj, записывается задним фронтом сигнала У9-1 в регистр 22, затем увеличивается на единицу в сумматоре 16 и снова записывается по тому же адресу в БОП 14.
В результате повторения такой пос- ледоватечьности операций для каждого элемента v , изображения БОП 14 формируются гистограммы Р0 и Р„ , значения которых г редставляют частоту появления элемента изображе-, ния V с яркостью а соответственно в центральной и периферийной областях изображения V.
10
5698536
На этапе 4.3 в блоке 8 происходит вычисление элементов матрицы и -бинарного изображения. Вычисление со- f ответствующего элемента матрицы Р и бинарного изображения объекта Z для каждого элемента v Јi, jj центральной части изображения V происходит за три такта внешнего сигнала У6-3 (фиг. 9а).
В первом такте из БОП 14 по адресу, определенному нулевьм уровнем сигнала У9-3 (фиг. 96) и цифровые значением яркости а элемента v i, j, считывается значение величины Р,(a/v i ,),которое подается на первый адресный вход Б1Ш 19. Одновременно из ЬОП 15, управляемого сигналом У9-7 (фиг.9 е-к первые четыре разряда которого являются адресньмч, а пятый управляет режимом записи-считывания НОП 15, считывается значение величины P(v Јi,/ Z,),которое подается на первый адресный вход БПП 21. На второй адресный вход БПП 21 поступает сигнал У9-6 (фиг. 9д). В БЛП 21 реализовано вычисление тлбличным методом следующего выражения:
15
20
25
0
5
г5
0
(v i.jjeZ, ), если У9-6 1, И l-P(v i, Z, ), если У9-6 О,
где В - цифровое значение результата на выходе БПП 21. В течение первого такта сигнал У9-6 имеет нулевой уровень. Поэтому на выходе БПП 21 формируется значение величины P(v i , j JЈ %) , которое поступает на второй адресный вход БПП 19. В результате в порвем такте на выходе ЬПП 19 формируется значение величины P(,) Р, (л/v i , p) , которое передним фронтом гиг- нала У9-4 (фиг. 8в) записывается в регистр 24.
В течение второго такта сигналы У9-3 и У9-6 имеют единичный уровень, поэтому на выходе ЬПП 19 формируется значение величины P(,j С Z,) P0(a/vp, ) , которое передним фронтом сигнала У9-5 (фиг. 8г) записывается в регистр 23.
В третьем такте значение величины P(,jj e Z, ) f0( . Qe О) с выхода регистра 23 подается на первый адресный вход БПП 20 и на первый вход сумматора 17. На второй вход сумматора 17 подается значение вечи- чины P(yti,Jl P,(a/vp, с выхода регистра Ik. Выход сумматоpa 17 соединен с вторым адресным входом Б1Щ 20. С помощью БПП 20 реализовано вычисление табличным методом операции деления. Таким образом, в третьем такте на выходе БПП 20 формируется значение величины P(v i,,/a), которое нулевым уровнем старшего разряда сигнала У9-7 {фиг. 9к) записывается в БОП 15 на место значения величины .ileZ) /а).и одновременно подается на первый вход вычитателя 18. На второй вход вычитателя подается пороговое значение ( рС 0,5). Если вычисленное значение P(vЈi,j eЪлI fa больше порога, то знак разности, вычисленной на вычитателе 18, равен единице, которая через элемент ИЛИ 25 поступает на первый вход блока 9 памяти бинарного изображения объекта В противном случае в блок 9 записывается нулевое значение. Управляет блоком 9 сигнал У10 (фиг. 9 е-к), первые четыре разряда которого являются адресными, а пятый разряд управляет режимом записи-считывания. В итоге после выполнения описанной последовательности вычислений для каждого элемента центральной части изображения V в БОП 15 и в блоке 9 сформированы соответственно матрица Р и бинарное изображение объекта 2. Временные диаграммы сигнала У2-3 для этапа 4.3 приведены на фиг. 9 л-с.
В предлагаемом устройстве производится смена эталонного изображения в каждом телевизионном кадре и в качестве нового эталона выбирается текущее значение сглаженного изображения. Для этого производится последовательное считывание элементов сглаженного изображения из блока 2 временного сглаживания и запись их в блок памяти эталонного изображения (фиг. 10). Первые четыре разряда сигналов У2-3 и УЗ являются сигналами адреса, а пятый разряд - сигналами записи-считывания. Характерной особенностью алгоритма межкадрового сглаживания является то, что изображения объекта, взятые из различных кадров, входят в сглаженный сигнал с. разными весами, причем с наибольшими весами в сглаженный сигнал, входят изображения последних кадров.
Во время обработки первого кадра выполняются только 1,3,4 и 5-й этапы в течение которых производится на. 10
15
569853 8
чальная запись эталонного изображения в блок 5, начальная установка сглаженного изображения в блоке 2, формирование исходной матрицы Р, все элементы которой равны 0,5, в блоке 8 и бинарного изображения объекта Z, все элементы которого равны единице, в блоке 9. Формирование исходной матрицы Р и исходного бинарного изображения объекта Z осуществляется путем подачи в .течение этапа 4.3 на второй адресный вход БПП 21 единичного уровня сигнала У9-6, а на второй вход схемы ИЛИ 25 - единичного уровня сигнала У9-8, который при обработке всех последующих кадров имеет нулевой уровень. Такой режим работы устройства в течение первого кадра обеспечивается внешними сигналами У6-1, У6-2 и сигналами, формируемыми в блоке управления D1, D4.
Предлагаемое устройство для опре- деления положения объекта на изображении позволяет повысить точность определения координат объекта на изображениях со сложным фоном. Это осуществляется за счет применения при вычислении значений разностной корреляционной функции бинарного изображения объекта. Использование бинарного изображения объекта значительно снижает влияние элементов эталонного изображения, принадлежащих участкам фона, на значения разностной корреляционной функции. В результате увеличивается вероятность соответствия положения минимума разностной корреляционной функции действительному положению объекта. Покадровое обновление бинарного изображения объекта позволяет учитывать все изменения формы и ориентации объекта.
20
25
30
35
40
Формула изобретения
Устройство для определения положения объекта на изображении по авт. св. № 1427396, отличающее- с я тем, что, с целью повышения точности устройства, в него введены третий блок памяти и блок формирования бинарного изображения, причем первый вход блока формирования бинарного изображения подключен к выходу блока временного сглаживания, второй вход подключен к седьмому выходу блока управления, выход формирования
9156«85310
бинарного изображения подключен к нн- подключен к восьмому выходу блока уп- формационному входу третьего блока равления, а выход - к четвертому вхо- памяти, управляющий вход которого ДУ коррелятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| Устройство определения координат объекта | 1988 |
|
SU1562980A1 |
| Устройство для определения положения объекта на изображении | 1987 |
|
SU1427396A1 |
| Устройство для выделения сигнала движущегося объекта | 1987 |
|
SU1628222A1 |
| Устройство для считывания и отображения видеоинформации | 1988 |
|
SU1817116A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СПЛОШНЫХ ОБРАЗОВ | 1991 |
|
RU2042204C1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |


Изобретение относится к цифровой обработке изображений и может быть использовано в системах распознавания, промышленных роботах и других областях техники. Цель изобретения - повышение точности определения координат объекта - достигается за счет использования бинарного изображения объекта при вычислении значений разностной корреляционной функции эталона и текущего изображения. Бинарное изображение объекта позволяет исключить из эталонного изображения участки фона. 10 ил.
ФиЫ
I
Фиг. г
Фиг. Ч
со ш со о
чО
ш
ЛЛППППППППППППППППППППППППППППППППП
ПППППППП П П П П П П П П П I
Q nnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
ЭтапЬ1 Фиг. 8
Фиг.9
Зтолиз
Vut.D
