Изобретение относится к медицинской технике, а именно к способам определения внутриглазного давления, и может быть использовано при диагностике глаукомы и других заболеваний глаза, связанных с изменением внутриглазного давления.
Цель изобретения - повышение точности измерений.
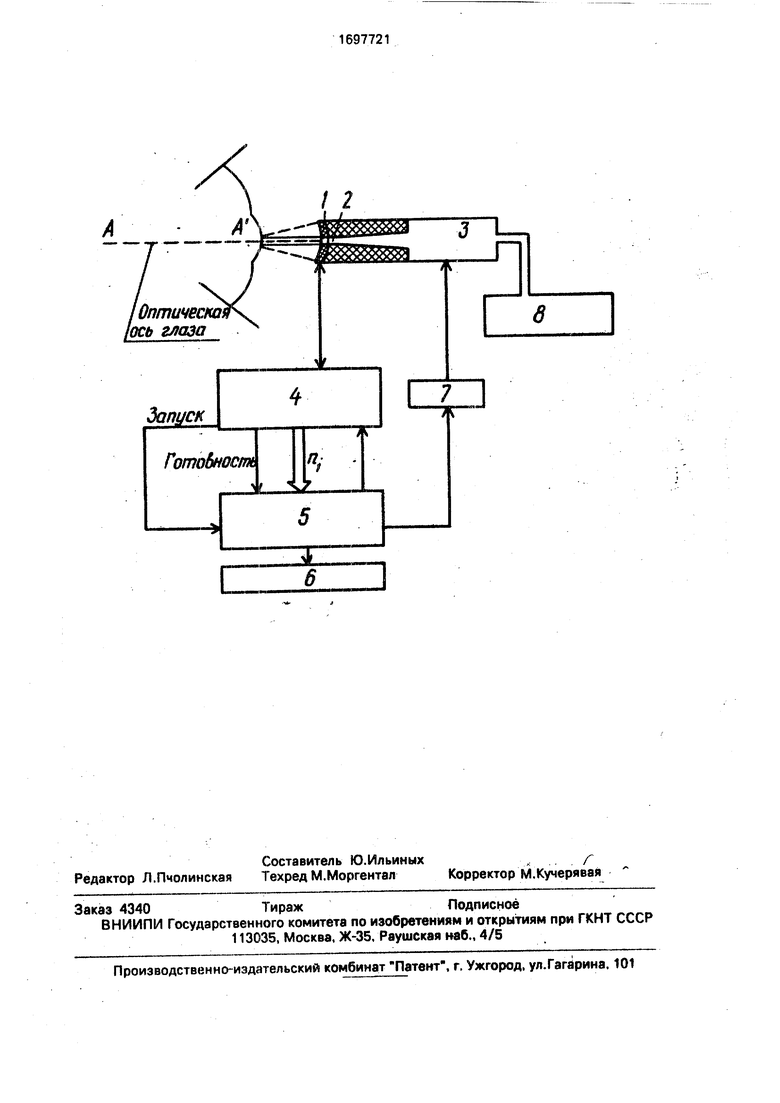
На чертеже представлена блок-схема устройства, реализующего способ бесконтактного измерения внутриглазного давления (ВГД).
Устройство содержит ультразвуковой датчик 1, сопло 2 с эяектропневмоклапаном 3, ультразвуковой измеритель 4, устройство 5 расчета, управления перемещением и
включением клапана, индикатор 6, усилитель 7, систему 8 формирования пневмодав- ления, двухкоординатный стол и, например, щелевую лампу ЩЛ-2Б (не показана)
Способ заключается в последовательном выполнении операций юстировки измерительной системы относительно глаза, формировании пневмоимпульса, локального воздействующего на роговицу глаза и вызывающего деформацию ее центральной части, измерении величины этой деформации и расчете по ней и параметрам пневмо- импульса величины внутриглазного давления. Для расчета используется формула Фриденвальда:
Ш«Е%
о о
ч XI
ND
Р
W
И)
0,107 + 0,276 ЛТГ
где W - давление, действующее на поверхность роговицы глаза;
ДК - перемещение (деформация) рого- вицы глаза под действием пневмоимпульса мм;
W - определяется по известным формулам, используемым в пневматике, и закладывается в память до начала измерения ;
W - (10,6 - 31 .Ь 3 2 + 53,7b 3 - 48b 9/2 le b Voc,
где Рос - давление воздуха в гневоим- пульсе на оси его распространения (г/мм): Рос Ро/(0,3 + 0,14 0/d)2; b - полутолщина струи воздуха в сечении пневмоимпульса (мм): b 0,152410 + d/2; Po - давление в пневмоммпульсе непосредственно на выходе из сопла (г/мм2); 0 - расстояние от сопла до глаза (мм); d - диаметр отверстия сопла (мм).
Для расчета деформации роговицы AR используют формулу:
ДР {т-Но)СзЬ,(2)
где п0, ni - временной интервал между моментом формирования УЗ-импульса и приема эхо-смгнала соответственно непосредственно перед формированием пневмоимпульса и посла воздействия им на роговицу глаза, с,
СзЬ -скорость ультразвука в воздухе (344-109 мм/с).
Способ осуществляют следующим об- раэоч,
Голову нацией -з фиксируют с помощью лобноподбородно1 | опоры, например, от ще левой лампы, а ультразвуковой зонд 1 с соплом устанавливают на двухкоординатном столе на расстоянии 30 - 40 мм от глаза и направляют з сторону роговицы глаза.
Осуществляют юстировку пневмо- и измерительной систем, относительно глаза, устанавливая УЗ-зонд 1 вместе с соплом 2 так, чтобы их общая ось АЛ совпала с оптической осью глаза.
Для этого включают измерительный прибор, формируя акустический импульс. Перемещают с помощью двухкоординатно- го стола УЗ-зонд 1 в направлении, перпен- дикулярном оптической оси глаза, и добиваются такого положения зонда 1, когда на индикаторе 8 прибора появляется текущее значение расстояния от зонда 1 до глаза. Это происходит тогда, когда УЗ-коле- бания, формируемые УЗ-зондом 1, нормаль- но отражаются от сферической поверхности роговицы. При этом амплитуда эхо-сигнала достигает максимального значения, достаточного для срабатывания УЗ-измерителя 4
временных интервалов, что свидетельствует об установке УЗ-зонда 1 вместе с соплом 2 точно в направлении по оптической оси глаза на центр роговицы, Затем осуществляют юстировку Уз зонда 1 и пневмосисте- мы (сопла 2) по расстоянию до роговицы глаза. Для этого плавно перемещают УЗ зонд 1 с помощью двухкоординатного стола в сторону роговицы глаза, уменьшая расстояние от зонда 1 до глаза. При этом формируют акустические импульсы, направленные в центр роговицы по оптической оси глаза, с помощью зонда 1, принимают отраженные от рогоаицы глаза сигналы и рассчитывают расстояние до глаза.
Скорость перемещения измерительной и пневмосистемы поддерживают на уровне порядка 1 мм/с. Частота следования УЗ-изме- рительных импульсов составляет 2 кГц, при этом УЗ-измеритель временных интервалов 4 повторяет измерения с указанной частотой,
Текущие начения расстояния от зонда 1 до глаза непрерывно рассчитывают по измеряемому временному интервалу, фиксируют устройством 5 управления и расчета и сравнивают со значением номинального заранее заданного расстояния 0, с помощью устройства 5 управления и расчета.
При совпадении текущего расстояния с номинальным значением 0 прекращают перемещение УЗ-зонда 1 с соплом 2 и формирование акустических импульсов. В этот же момент формиоуют короткий пневмоим- пульс, направленный от сопла 2 в центр роговицы глаза, по управляющему сигналу с, устройства 5 управления и расчета, открывающему на короткое время (порядка 10 мс) злекгропневмоклапан 3.
Расстояние 0 выбирают равным 10 мм исходя из требований, с одной стороны, работы УЗ-измерителя 4 временных интервалов за пределами мертвой зоны пьезопреобразователя, а с другой стороны, воздействия на роговицу глаза нерасходящимися пневмоимпульсами. При этом воздух из рессивера через клапан 3 поступает от компрессора системы 8 формирования пневмодавления в сопло 2, на выходе которого формируется короткий пневмоим- пульс, направленный на центр роговицы глаза с определенным давлением. Давление пневмоимпульса на роговицу глаза зависит от давления в пневмосистеме. диаметра выходного отверстия сопла 2 и расстояния от сопла 2 до роговицы глаза.
Давление в пневмосистеме выбрано на уровне 1-атм, диаметр сопла.2 - 1 мм, расстояние от сопла 2 до глаза - 10 мм. При таких параметрах пневмоимпульса давление, действующее по оси сопла 2 на роговицу глаза, находящуюся на расстоянии 10мм от сопла 2, состаэляет 0,4 кг/см2, что соответствует значениям давления на глаз, принятым при контактных методах измерения, и является травмобезопасным для глаза.
Соответствие формируемого пневмо- импульса параметрам, заложенным в память устройства 5 управления и расчета, обеспечивается конструктивными парамет- рами сопла и компрессора, а также форммро- ванием пневмоимпульса в момент совпадения расстояния от соплз 2 до роговицы глаза, измеряемого по УЗ-импульсам в процессе юстировки, с заданным в програм- мной памяти устройства 5 расстоянием 0.
Локально воздействуя на центр роговицы глаза с заданным давлением, пневмоммпульс вызывает деформацию ее центрэльнсгй части, что изменяет расстояние от зонда 1 до глаза за счет перемещения роговицы. После воздействия воздушным пневмоимпульсом на роговицу глаза через время 5 мс, необходимое для завершения переходных процессов в элект- ропневмоклапане 3 и воздушной струе, воз- обновляется по сигналу Строб с таймера ПТ ОМ К устройства 5 управления и расчета (сформированному в соответствии с заложенным в память микроЭВМ значением временной задержки) формирование акустических импульсов, направленных от УЗ-зонда 1 на центр роговицы глаза, их прием и измерение расстояния измерителем 4 временных интервалов.
По принятым после воздействия пневмо- импульсом на роговицу глаза отраженным от глаза акустическим сигналам рассчитывают расстояние li от зонда 1 до смещенной при деформации под давлением пневмоимпульса роговицы. Расчет осуществляют с помощью устройства 5 управления и расчета, причем определяют величину деформации роговицы по формуле (2).
По полученному значению AR в устрой- стве 5 управления и расчета рассчитывается по формуле (1) с учетом параметров пневмоимпульса, заложенных в памяти устройства 5,
величина ВГД, которая затем отображается на индикаторе 6.
Формирование пневмоимпульса и измерительного УЗ-импульса и направление их по одной оси в сторону глаза позволяет выполнять измерения точно в направлении деформации роговицы глаза, перпендикулярно (за счет совмещения осей воздействия пневмоимпульса и направления УЗ импульса с оптической осью глаза) поверхности роговицы глаза. При этом угловые микродвижения глаза незначительно сказываются только на амплитуде отраженного от поверхности роговицы эхо-сигнала, а временные параметры эхо-сигнала практически не меняются, что и обеспечивает независимость результатов измерений от угловых микродвижений глаза.
Формула изобретения Способ бесконтактного измерения рнутри- глазнсго давления, заключающийся в юстировке измерительной системы относительно глаза, формировании пневмоимпульса, локально воздействующего на роговицу глаза и вызывающего деформацию ее центральной части, измерении величины этой деформации и расчете по ней и параметрам пневмоимпульса величины внутриглазного давления по известным формулам, отличающийся тем, что, с целью повышения точности измерений, юстировку и измерение величины деформации роговицы осуществляют путем непрерывного формирования акустических импульсов с помощью излучателя, выполненного фокусирующим с кольцевой апертурой и пневмосоплом, расположенным в отверстии излучателя по оси зонда, последующего приема отраженных от глаза сигналов и определения по ним расстояния до глаза, причем юстировку измерительной системы осуществляют путем перемещения ее в сторону глаза, а формирование пневмоимпульса осуществляют в момент совпадения замеренного расстояния до глаза с заданным, и фиксации системы, после чего измеряют деформацию глаза в промежуток времени от 5 до 20 мс по истечении действия пневмоимпульса. .
в
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА ВНУТРИ ТОНКОСТЕННОЙ ГЕРМЕТИЧНОЙ МЯГКОЙ ОБОЛОЧКИ | 2011 |
|
RU2467679C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2011 |
|
RU2471406C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 1994 |
|
RU2095022C1 |
| Устройство для ультразвукового исследования глаза | 1985 |
|
SU1284519A1 |
| Устройство для ультразвукового исследования глаза | 1982 |
|
SU1055478A1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2018 |
|
RU2675020C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2019 |
|
RU2725854C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2011 |
|
RU2485879C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ И БЕСКОНТАКТНЫЙ ТОНОМЕТР | 1994 |
|
RU2067845C1 |
| Способ поверки ультразвуковых эхо-импульсных приборов | 1988 |
|
SU1631409A1 |
Изобретение относится к медицинской технике и может быть использовано при диагностике глаукомы и других заболеваний глаз, связанных с изменением внутриглаз, ного давления,Целью изобретения является повышение точности измерений. Для этого измерение величины деформации роговицы таза осуществляют путем непрерывного формирования акустических импульсов с помощью излучателя, выполненного фокусирующим с кольцевой апертурой и пнезмо- соплом, расположенным в отверстии излучателя по оси зонда, последующего приема отраженных от глаза сигналов и определения по ним расстояния до глаза. При этом юстировку измерительной системы осуществляют путем перемещения ее в сторону глаза, а формирование пневмоимпуль- са осуществляют в момент совпадения замеренного расстояния до глаза с задан ным, и фиксации системы После этого измеряют деформацию глзза в промежуток времени 5 - 20 мс по истечении действия пневмоимпульса, затем рассчитывают дав-1 ление по формулам. 1 ил
| Патент ФРГ №22523313, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
