о
ел ел
4:;
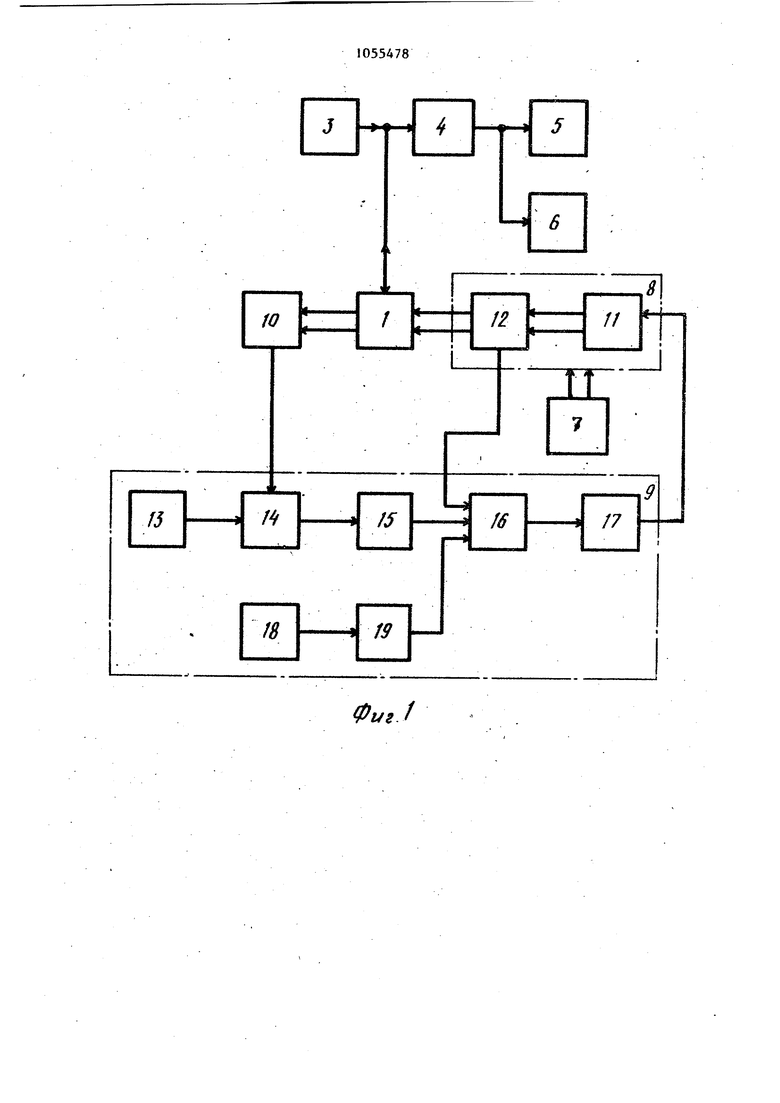
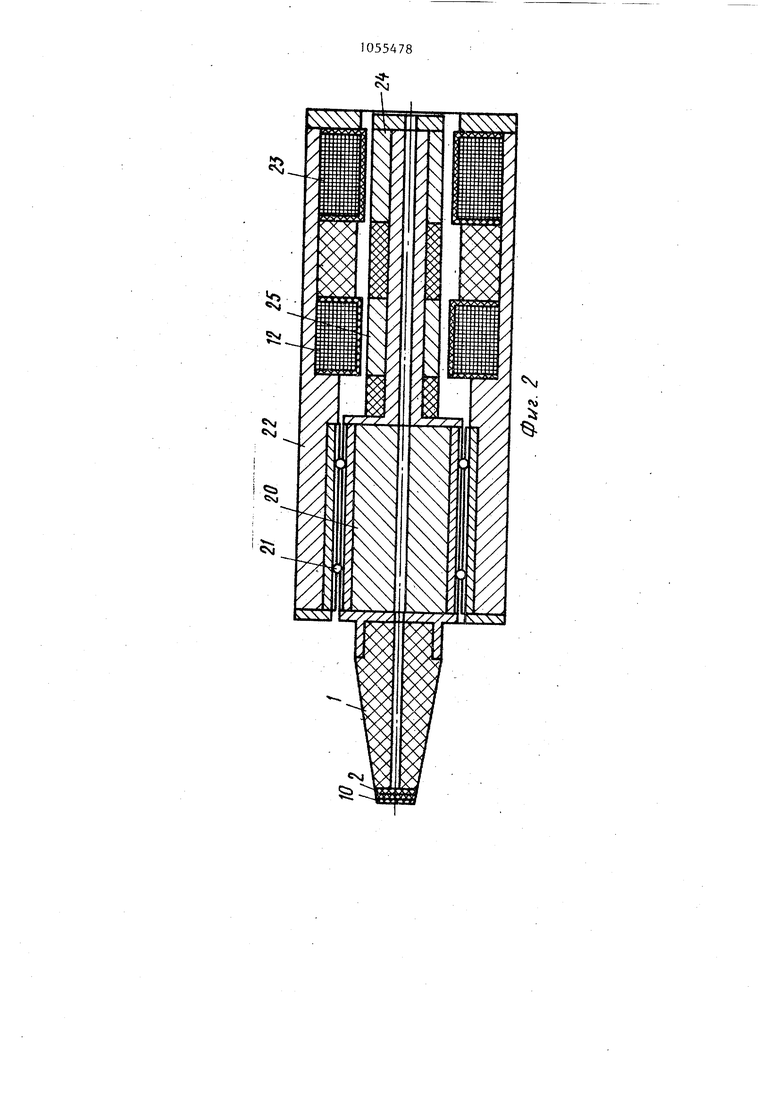
00 Изобретение ОТНОСИТСЯ к медицинской технике и используется в офтапЬ ьюлогин при ультразвуковом измерении размеров глаза и его структур. Известно устройство для ультразву кового исследования глаяа, содержащее ультразвуковой датчик, передающее и приемное устройство, соединенные с зондом, индикаторный прибор, .двухкоординатный стол, механическое устройство прижима зонда к поверхности, и цифровой измеритель Q Однако данное устройство имеет сравнительно большую погрезпность измерения размеров из-за непостоянного прижимного усилия зонда/ и, -как следствие, различной деформации поверхности роговицы глаза. Наиболее близким техническим ретением к изобретению является устрой ство для ультразвукового исследования глаза, содержащее датчик с пьезоэлектрическим преобразователем и приводом линейного механического перемещения пьезоэлектрического преобразователя, соединенные с блоком управления, передакяций и приемный блоки, соединенные с датчиком, узел индикации и механическую систему перемещения датчика по двум координатам 2j . Однако известное устройство не обеспечивает постоянную величину де формации при разных значениях внутриглазного давления, что влечет за собой увеличение погрешности при изменении внутриглазного давления. Целью изобретения является повышение точности исследований путемстабилизации величины деформа1щи глаза. Для достижения поставленной дели устройство для ультразвукового исследования глаза, содержащее блок управления, ультразвуковой датчик с пьезоэлектрическим преобразователем и приводом линейного механического перемещения пьезоэлектрического пре образователя, соединенным с блоком управления, передаюрщй и приемный блоки, соединенные с датчиком, узел индикация и механическую систему пе ремещения датчика по двум координатан, снабжено емкостным датчиком, установленным на рабочем торце ульт развукового датчика, и датчиком ско рости перемещения, связанным через блок управления с приводом, при это блок управления выполнен в виде пос ледовательно соединенных генератора, мостовой схемы, связанной с емкостным датчиком, выпрямителя, сумматора и усилителя постоянного тока, а также источника опорного напряжения, подключенного к входу сумматора через переключатель. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг, 2 - конструкция системы перемещения ультразвукового зонда; на фиг. 3 - конструкция измерителя величины деформации. Устройство содержит ультразвуковой датчик 1 с пьезоэлектрическим преобразователем 2, переданжщй 3 и приемный 4 блоки, узел 5 индикации, измеритель 6 с цифровой индикацией, механическую систему 7 перемещения по двум координатам, CHCTe fy 8 перемещения ультразвукового датчика и блок 9 управления. Устройство снабжено емкостным датчиком 10 величины деформации, установленным на рабочем торце ультразвукового датчика, а система 8 перемещения выполнена в виде связанных электрически через блок 9 управления электромеханического привода 11 и датчика 12 скорости перемещения. Блок 9 управления выполнен в виде последовательно связанных генератора 13,-мостовой схемы 14 измерителя величины деформации, выпрямителя 15, сумматора 16 и усилителя 17 .постоянного тока, а также источника 18 опорного напряжения, подключенного к входу сумматора 16.через переключатель 19. Емкостной датчик соединен с блоком 9 упр1авления, ° Ультразвуковой датчик состоит из пьезоэлектрического преобразователя . 2, на который нанесен согласующий и защитный слой и слой демпфера. Ультразвуковой датчик 1 установлен на подвижной платформе 20. Датчик 1 электрически соединен с передаодим 3 и приемным 4 блоками. Датчик I обеспечивает излучение ультразвукового импульса и прием отраженных сигналов 8 паузах между моментами излучения. Передакяций блок 3 обеспечивает импульсное возбуждение пьезоэлектрического преобразователя 2. Приемный блок 4 осуществляет усилие и детектирование отраженных сигналов, принятых датчиком 1. Отраженные сигналы усиливаются до величины, достаточной для отображе 1ия на узле 5 индикации. Измеритель 6 с цифровой индикацией предназначен для измерения расстояний между двумя отраженными от структур глаза сигналакт и представления результата в цифровой форме. Система 8 перемещения предназначена для плавного перемещения датчи ка 1 к глазу, обеспечения хорошего акустического контакта датчика I с глазом, задания величины деформации поверхности роговицы глаза датчиком 1 и стабилизации величины этой деформации при измерений расст яний измерителем 6, Электромеханический привод 11 системы 8 перемещения представляет собой подвижную платформу 20 с установленным на ней датчиком i, которая перемещается на шарикоподшипниковых опорах 21 относительно корпуса 22. - Двигателем линейного перемещения платформы 20 является соленоид 23, якорь 24 которого механически соединен с подвижной платформой 20, а катушка соленоида 23 установлена на корпусе 22. Соленоид 23 подключен к усилителю 17 постоянного тока блока 9 управления. Индукционный датчик 1 скорости перемещения (фиг.2) представляет собой катушку, установленную на корпусе 22, внутри которой перемещается постоянный магнит 25, жестко связанный с подвижной платформой 20. ЭJ eктpичecкий сигнал, наводимый в катушке датчика 12, про порционален скорости перемещения подвижной платформы 20. Датчик 12 скорости перемещения подвижной плат формы 20 подключен к блоку 9 управления таким образом, что перемещени подвижной плaтфap в.l 20 с датчиком 1 к глазу создает в нем сигнал положи тельной амплитуды, а перемещение от глаза - сигнал отрицательной амплитуды. Датчик 12 скорости перемещени предназначен для демпфирования по скорости подвижной платформы 20, что обеспечивает плавное перемещени датчика 1. Емкостной датчик 10 представляет собой электрическую подложку 26(фиг. 3 круглой формы из акустически прозрачного материала, на которую нанесены токоведущие дорожки 27,расходящиеся от центра в радиальном направлении. Сверху токовед5тдие дорож78ки 27 покрыты тонким слоем диэлекДорожки 27, замыканчциеся в трика центре круглой подложки 26, образуют одну обкладку конденсатора, дорожки 27, замыкающиеся с внешней стороны по кругу, образуют вторую обкладку конденсатора. Датчик 10 (Лиг.2) величины деформации установлен на торце ультразвукового датчика I перед пьезоэлектрическим преобразователем 2. Устройство работает следующим образом. При включе1ти устройства запускается генератор 13 блока 9 управления, который вьщает на мостовую схему 14 измерителя переменное напряжение синусоидальной формы. В исходном состоянии мостовая схема 14 измерителя сбалансирована, и ее выходной сигнал равен нулю. Положительный сигнал источника 18 опорного напряжения через переключатель Ь9 и сумматор 16 поступает на усилитель 17 постоянного тока. Усиленный по току сигнал поступает на катушку соленоида 23 электромеханического привода 11, и якорь 24 с подвижной платформой 20 и ультразвуковым датчиком перемещается в крайне е от глаза положение. Перед началом исследования голову пациента фиксируют. Это может быть сделано с помощью фиксирующего устройства для релевой лампы, например, типа ШЛ56. Голова пациента фиксируется в рамке, плотно прилегая к налобнику.Систему 8 перемещения ультразвукового датчика 1 устанавливают перед глазом вдоль его оптической оси с помощью механической системь: 7 перемещения г так чтобы расстояние от торца ультразвукового датчика 1 до глаза было 5-10 мм. Переключателем 19 меняют полярность сигнала от источника 18 опорного напряжения с положительной на отрицательную. Пройдя через сумматор 16 и усилившись в усилителе 17, этот отрицательный сигнал изменяет направление перемещения электромеханического привода 11. Подвижная платформа 20 с датчиком движется к глазу. При ее движении постоянный магнит 25 наводит в датчике 12 скорости перемещения положительный сигнал, который подается на вход сумматора 16, где складьтается с отрицательным сигналом. поступающим ot источника S опсэрного напряжения. В результате этого на выходе сумматора 16 поддерживается сигнал, управляющий электромеханическим приводом П через усилитель 57 таким образом, чтобы обеспечивалось плавное перемелт.ение датчика I к глазу, т.е. датчик 12 скорости перемещения осуществляет демп фирование по скорости системы 8 пере . При контакте ультразвукового датчика 1. с поверхностью роговицы глаза изменяется Диэлектрическая проницаемость среды между оСкладками 27 и, следовательно, емкость датчика 10, мостовая схема 14 измерителя разбалансируется, сигнал переменного напряжения с выхода мостовой схелш 14 измерителя через выпрямитель 1 поступает на вход сумматора 16, где складывается с отрицательным сигналом от источника 18 опорного напряжения. Таким образом, величина отрицательного сигнала на выходе сумматора 16 уменьшается на величину сиг нала, выпрямленного от разбалансированной мостовой 14, и уменьша тся сигнал управления электромеха ническим приводом 11. Усилие, развиваемое электромеханическим приводом 115 уменьшается. При определенной деформации поверхности роговицы глаза датчиком 1 сигнал с разбалансированной мостовой 14 измерителя уменьшает от рицателышй выходной сигнал сумматора 16 настолько, что усилие, развиваемое электромеханическим приводом 11 и действукщее через датчик 1.на глаз, сравнивается с усилием, деист вующим со стороны глаза на датчик 1 движение которого при этом прекращается. Сигнал датчика 12 скорости перемещения становится равным нулю. Устанавливается динамическое равновесие мелсду давлением датчика 1 на 8« глаз и внутриглазным давлением, действующим со стороны глаза на датчик 1 при заданной величине деформации поверхности роговицы, а затем осуществляется ультразвуковое измерение размеров глаза. Передаю1С(ий блок 3 выдает мощный электрический импульс, возбуждающий ультразвуковые и электрические колебания в датчике 1. При акустическом контакте датчика 1 сонаследуемым глазом импульс ультразвуковых колебаний распространяется в глазу прямолинейно, отражаясь от расположенных структурных неоднородностей. Отраженные ультразвуковые импульсы достигают датчика 1, преобразуются им в импульсы электрических колебаний и поступают на вход прием.ного блока 4. В приемном блоке 4 происходит усилие и детектирование принятых сигналов, С выхода приемного блока 4 сигналы подаются на узел 5 индикапии, на экране которого формируется эхограмма из отраженных от структуры импульсов, полог ен-ие которых на горизонтальной временной оси определяется глубиной залегания отражающей структуры. Одновременно с выхода приемного блока 4 сигналы подаются на измеритель 6 с цифровой индикацией, которьда осуществляет измерение расстояния между отраженными импульсами. После проведенных измерений переключателем 19 блока 9 управления изменяют полярность источНика 18 .опорного напряжения с отрицательной на положительную, и электромеханический привод 11 плавно от.водит ультразвуковой датчик I от глаза. Измерение закончено. Изобретение обеспечивает повышение точности измерения параметров глаза и исключает неприятные ощущения для исследуемого пациента, вызьтаемые потоком воздуха из сопла.
н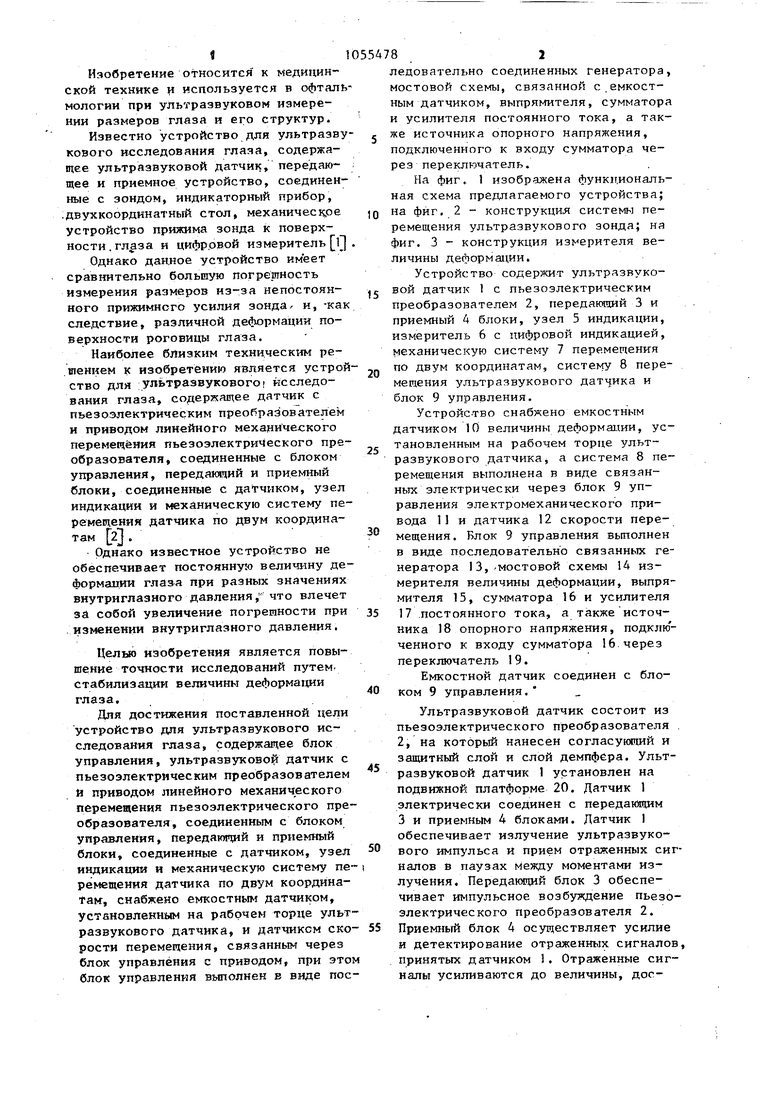


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового исследования глаза | 1985 |
|
SU1284519A1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| Устройство для ультразвукового исследования глаза | 1977 |
|
SU695660A1 |
| Ультразвуковое устройство для измерения контактных давлений | 1990 |
|
SU1746297A1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| УСТРОЙСТВО ДЛЯ ОФТАЛЬМОЛОГИЧЕСКИХ ОПЕРАЦИЙ | 1994 |
|
RU2068677C1 |
| СЛЕДЯЩИЙ КЕРАТОТОМИЧЕСКИЙ НОЖ | 1991 |
|
RU2033094C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ ДЕТАЛИ | 2011 |
|
RU2485441C1 |
| СИСТЕМА ДЛЯ ИЗГОТОВЛЕНИЯ ИМЕЮЩЕГО МОДУЛЬНУЮ КОНСТРУКЦИЮ УСТРОЙСТВА ДЛЯ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ И УНИФИЦИРОВАННЫЕ КОМПОНЕНТЫ | 2003 |
|
RU2342639C2 |
УСТРОЙСТВО ДЛП УЛЬТРАЗВУКОВОГО ИССЛЕДОВАНИЯ ГЛАЗА, содержащее блок управления, ультразвуковой датчик с пьезоэлектрическим преобразователем и приводом линейного механического перемещения пьезоэлектрического преобразователя, соединенным с блоком управления, передающий и приемный блоки, соединенные с датчиком, узел индикации и механическую систему перемещения датчика по двум координатам, отличающеес я тем, что, с целью повьппения .точности исследований путем стабилизации величины деформации глаза, оно снабжено емкостным датчиком, установленным на рабочем торце ультразвукового датчика, и датчиком скорости перемещения, связанньгм через блок управления с приводом, при этом блок управления выполнен в виде последовательно соединенных генератора, мостовой схемы, связанной с емкостным датчиком, выi (Л прямителя, сумматора и усилителя постоянного тока, а также источника опорного напряже«ия, подключенного к входу сумматора через переключатель.
10
/
15
18
12
//
п
fS
17
0ug.f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент СМ № 4154114, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для ультразвукового исследования глаза | 1977 |
|
SU695660A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
